车辆装载长度测量系统研发*
2012-07-25 05:33谢春丽孙凤英闫春利
传感器与微系统 2012年3期
谢春丽,孙凤英,闫春利
(东北林业大学交通学院,黑龙江哈尔滨 150040)
0 引言
近年来,随着我国经济和交通事业的发展,公路运输获得了快速发展,然而,长期以来,公路货运却出现了一种非法超限(超高、超宽、超长、超重)运输。据不完全统计,超限运输使公路和桥梁的使用寿命普遍缩短,特别是高速公路,寿命损失高达60%~80%,全国平均年直接经济损失10亿元以上[1,2]。由此而引发的交通事故占交通事故总数的30%以上,占货车事故的55%以上,造成的经济损失占事故经济损失的50%左右,交通税费流失巨大。许多超限车辆以低速或超低速运行,严重降低了道路通行能力,影响了道路利用率和总体经济效益。沿途造成大气污染和噪声污染,破坏了人类的生态环境[3]。因此,超限运输危害巨大,对人、路、车、环境等方面都有很大影响。为更有效地治理车辆超限问题,本课题组研发了超限运输车辆门禁控制系统[4,5],能够测量车辆装载高和宽的几何尺寸,对于车辆装载的长度由于装载货物材质、几何形状差别较大,很难实现准确测量,只能判断其是否超过18m。而车辆装载长度会直接影响车辆行驶安全性,尤其是弯道行驶时,影响更加明显。为解决车辆装载长度准确测量问题,研发了车辆装载长度测量系统,可以实现非接触式不停车情况下的装载长度测量。
1 测量原理
车辆装载长度测量系统由软件控制系统、红外光幕传感器、超声波测距传感器、光电开关、上位机界面等组成。一对红外光幕传感器和光电开关构成复合基准,只有红外光幕传感器和光电开关同时触发才认为是有车辆通过,避免了由于人为或外界干扰遮挡所带来的误判断。测量原理如图1所示,当车辆通过红外光幕传感器1和光电开关1所构成的复合基准1时,触发单片机使其进入预测量状态,当车辆完全通过复合基准1后,而没有到达红外光幕传感器2和光电开关2构成的复合基准2时,判断其为较短的车,这时就以复合基准2为测量基准,当此车完全通过复合基准2时,单片机进入测量状态,单片机启动超声波测距传感器测量车头与超声波测距传感器之间的距离。当车辆没有完全通过复合基准1,而车头已经到达复合基准2时,判断其为较长的车,以复合基准1为测量基准。当完全通过复合基准1时,单片机启动超声波测距传感器,测量车辆前部与超声波测距传感器之间的距离。采用这种双基准的设计可以解决车辆排队通过时车辆装载长度的准确测量。

图1 车辆装载长度测量系统俯视图Fig 1 Top view of the vehicle loading length measurement system
2 系统组成
车辆装载长度测量系统由工控机、软件系统和硬件系统等组成。软件系统主要包括人机界面与通信控制等程序,实现硬件系统与工控机的数据交互,完成数据采集与硬件控制等功能。硬件系统主要包括单片机、红外光幕传感器、光电传感器、超声波测距传感器及其附件组成,判断是否有车辆通过并完成车辆装载长度的测量,将相关数据通过通信电路传递给上位机进行处理。
2.1 软件系统
为完成车辆装载长度的测量所设计的软件系统程序流程如图2所示,本软件系统包括串口通信、计时器、计数器、中断程序、延迟函数程序、目标判断和数据处理等功能[6]。各部分功能如下:
1)串口通信:实现单片机与工控机通信的程序,将传感器的信号进行编码转换,转换为用户可理解的文字、字母及十进制数据。
2)计时器:在超声波测距模块工作时,用来计时超声波发射到返回的时间,其时间单位是μs。
3)计数器:每一对复合基准都对应着一个相应的计数器,被车辆遮挡一次相应的计数器加1,2个复合基准的计数器数值相同时,认为是同一车辆同时经过两复合基准,则认定该车辆为装载长度较长的车辆。
4)中断程序:这部分主要功能是当超声波返回时,触发外部中断,使计时停止,这样会使计时更加准确。当计时器溢出时会产生时钟中断,使寄存器全部置零。

图2 软件系统程序流程图Fig 2 Flow chart of software system program
5)延迟函数程序:延迟函数分为两部分,一部分是10 μs的延迟函数,一部分是ms级的延迟函数,具体延迟时间可以根据实际情况自己设定。
6)目标判断:用来判断是否有车辆驶过并判断车辆是否完全通过测量复合基准。
7)数据处理:将计时器记录的时间通过计算、转换变成以cm为单位的车辆前部与超声波测距传感器的距离,进而计算车辆装载长度。
2.2 硬件系统
硬件系统主要包括工控机、单片机和传感器等。本系统采用MCS—51完全兼容的STC89C52单片机,主要包括升压电路、通信电路等,电路结构框图[7]如图 3所示。STC89C52根据各传感器的输入信号按照给定的程序完成所有的数据处理后将数据传输给上位机,各传感器的布置方式如图4所示。

图3 电路结构框图Fig 3 Block diagram of the circuit structure

图4 传感器的布置图Fig 4 Sensors layout
3 排队车辆装载长度测量原理
采用双复合基准作为超声波测距传感器的测量基准可以解决车辆排队通过时装载长度的测量问题。由于本系统的应用主要是在高速路入口处,故可将超声波测距传感器安装在高速入(出)口收费亭处,这里可以假设在本系统前方不形成车辆排队现象,车辆排队现象只出现在本系统的后方,设复合基准1和复合基准2到超声波测距传感器的距离分别为L1和L2,本系统中L2一般为8~10 m,因此,对于一般的车辆而言均有LA+LB≥L2,而且收费亭处于复合基准2与超声波测距传感器之间如图1所示,所以,在复合基准2和超声波测距传感器之间基本不存在车辆遮挡现象即车辆排队基本上不影响超声波测距传感器的工作。排队形式分析与测量方式如下:
1)A,B装载长度均为较短车辆,其装载长度分别为LA和LB。设A车在前,B车在后,A车离开复合基准2时,触发超声波测距传感器测量车辆前部与超声波测距传感器的距离为l,则LA=L2-l;由于设前方不存在排队现象A车经过收费亭收费后马上驶离该测量系统,故不影响超声波传感器按同样的原理测量后面排队的B车辆装载长度。
2)A,B装载长度均为较长车辆,当A车辆同时触发了复合基准1和复合基准2时判断其为装载长度较长的车辆,这时使用复合基准1作为触发基准,当A车辆通过复合基准1后,触发超声波测距传感器测量车辆前部与超声波测距传感器的距离为l,则LA=L1-l,按同样的原理测量B车辆的装载长度,复合基准1和复合基准2同时也起计数器的作用,计数相同的认为是同一车辆。
3)A和B车辆分别为装载长度较长和较短车辆时,则分别使用复合基准1和复合基准2作为测量触发基准。
4 实验验证
为了减少实验时间和成本,考虑安全因素,实验时装置不能直接装在高速公路收费站上实验,采用在实验室搭建模拟高速公路收费站平台的方法检测系统各部分的工作情况是否良好,单片机对光幕、超声波等信号的接收是否准确,装置软硬件匹配情况,记录系统在模拟实验的状态下所测得的数据,为查找问题和对装置的进一步改进提供依据。
1)用同一物体,模拟汽车多次通过车辆装载长度测量系统,测出数据进行比较,确定系统的误差和工作可靠性。
2)用不同长度的物体模拟汽车通过车辆装载长度测量系统,测出数据进行比较,确定系统的误差和工作可靠性。
3)用多个不同长度的物体模拟汽车,排队通过车辆装载长度测量系统,测出数据,确定系统的误差和工作可靠性。
对于不同长度的物体和相同长度的物体进行反复测量实验,得到测量结果。表1为非排队情况下所测得的数据,表2为排队的情况下所测得的数据。由于实验中各传感器的安装位置设定大于20 cm的物体认定为装载长度较长的车辆,小于20 cm的车辆认定为装载长度较短的车辆。

表1 非排队情况模拟实验采集的数据Tab 1 Simulation experiment data of non-queuing
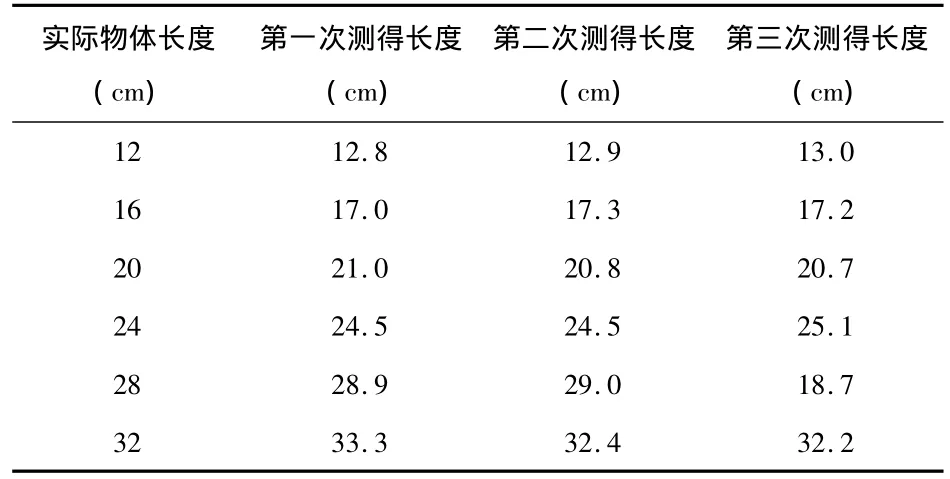
表2 排队情况下模拟实验采集的数据Tab 2 Simulation experiment data of queuing
5 结论
1)从实验数据来看,本系统的精度很高,误差较小,基本控制在±1 cm内。
2)在实验平台上进行装置调试,调试结果表明:该系统能够实现在各种复杂的工作环境和排队情况的准确测量车辆装载长度。针对车辆排队通过的现象,设计比较复杂的逻辑程序,利用双基准触发机制和复合基准的计数功能,实现了各种复杂排队情况下车辆装载长度的准确测量。
3)虽然实验平台与实际工作环境有较大的差距,但本设计的所有硬件和软件程序都有普遍应用性和适应性,只需将超声波测距传感器的功率换成更大的就可实际应用。
[1]蒋在文.道路超限超载运输治理的机理与对策[D].西安:长安大学,2010.
[2]胡 强.公路超限超载运输治理对策研究[D].天津:天津大学,2010.
[3]王 霞,张 欢.公路超限运输环境成本量化研究[J].中外公路,2010,30(6):246-249.
[4]谢春丽,孙凤英.高速公路超限运输车辆检测系统数据库技术[J].交通与运输,2007(2):64-66.
[5]谢春丽,孙凤英,刘永阔.高速公路超限运输车辆门禁控制技术研究[J].交通与运输,2007(1):76-79.
[6]Mahdi A E,Grout I A.PLL-based ASIC system for DSP real-time analogue interface[J].Microprocessors and Microsystems,2003,27(1):9-17.
[7]赵建领,薛园园.51单片机开发与应用技术详解[M].北京:电子工业出版,2009.
猜你喜欢
小学生学习指导(低年级)(2021年4期)2021-07-21
科学(2020年3期)2020-01-06
小学生学习指导(低年级)(2018年9期)2018-09-26
劳动保护(2018年8期)2018-09-12
学生天地(2018年18期)2018-07-05
电子制作(2017年7期)2017-06-05
公民与法治(2016年19期)2016-05-17
读者·校园版(2015年7期)2015-05-14
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10