
电磁导航智能车检测和控制系统的研究*
2012-07-25 05:35张文斌刘雪扬丘世因
传感器与微系统 2012年4期
刘 源,张文斌,刘雪扬,丘世因
(昆明理工大学机电工程学院,云南昆明 650500)
0 引言
智能小车的设计开发涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械及车辆工程等多个学科,其中控制算法对于智能车自主行驶的稳定性和流畅性起着关键作用[1~3]。通过分析电磁信号的特征,本文提出了针对不同路况信息的传感器布置方案和控制策略,供智能车进行较好的导航定位,提高了智能车的运行速度和平稳性。
1 循迹信号的建立和分析
1.1 磁场信号的建立

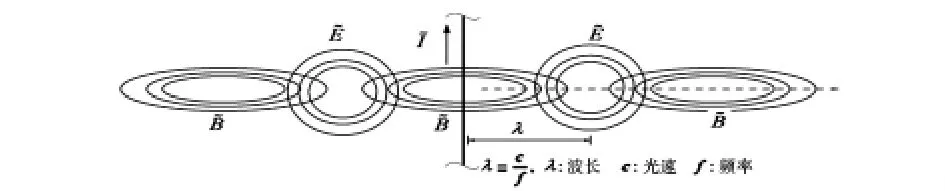
图1 导线周围的磁场分布Fig 1 Magnetic field distribution around wire
1.2 磁场的分析[4]
如图2所示,可以得出距导线距离为r处的磁感应强度。
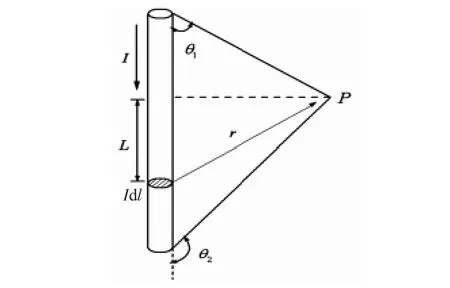
图2 直线磁场计算简图Fig 2 Diagram of straight line magnetic field calculation

经过计算得

设导线的长度为无限长,即θ1=0,θ2=π,则

由于工字电感测试信号原理为电磁感应原理,且原理简单、使用方便、价格便宜,所以,选用工字电感作为磁场信号检测的传感器。根据法拉第定律,传感器的内部感应电压E与磁场B(t)、线圈数N,截面积A,θ为磁场方向和传感器线圈轴线的夹角关系有
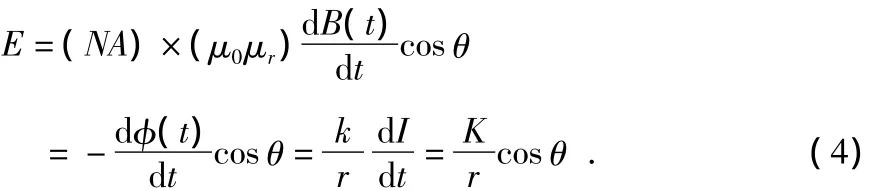
设传感器中心轴线与导线的垂直距离为h、水平距离为x,则可知


为了防止传感器的抖动对测量信号产生过大的影响,所以,首先对传感器的排布高度进行了相应的分析,分别将h赋值为[5,12 cm],每隔 1 cm 取一个高度,x∈[-24,24 cm],在Matlab中得到了水平和竖直放置电感测出的感应电压E和水平偏移量x的关系曲线,得到图3的测试曲线图,图中上半部分为水平电感的仿真曲线,下半部分为竖直电感的仿真曲线。
2 智能车整体方案设计
在1节中已经建立了20 kHz的100 mA交变电流导航信号,针对该信号进行了智能车的开发,图4是各主要模块在已经开发的电磁导航智能车上的分布图。
智能车首先通过传感器信号采集模块将循迹电磁信号选频采集,交由传感器信号处理模块进行滤波、放大,之后飞思卡尔MC9S12DG128对信号进行A/D转换和计算分析,针对S—D5数码舵机输出300 Hz不同脉宽的PWM波控制舵机转角来控制小车转向,另外,根据编码器反馈回来的小车车速构成闭环控制系统,通过增量式PID来控制小车的车速。通过5V电源模块给小车各个模块供电,外接键盘用来对小车的参数进行整定和调试。
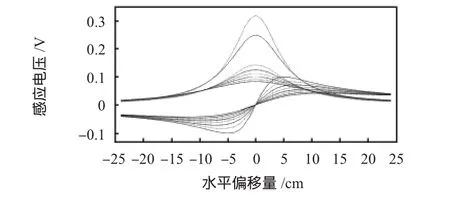
图3 水平和竖直放置电感测出的感应电压E和水平偏移量x的关系曲线Fig 3 Relation curve of inductive voltage E and level offset x measured by level and the vertical placed inductance
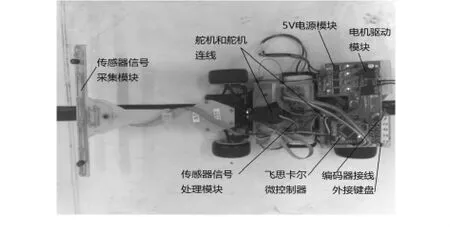
图4 主要模块在智能车上的分布图Fig 4 Distribution of main module in intelligent car
3 控制策略的确定
根据图3所示的水平布置传感器的仿真感应电压E的分布特性,得出传感器离导线距离越远所测出的E值就越小的特点,建立了智能车循迹的控制策略。通过横排分布的左右对称的6只传感器来判别漆包线位于哪个区间,从左到右对传感器编号,根据飞思卡尔单片机A/D采集通道来进行相应的编号,即分别编号为{0,1,2,3,4,5},在单片机对应的A/D采集通道的A/D转换值中寻找该时刻6只传感器中的最大值和次大值,将最大值和次大值的对应编号相加,将得到的和赋值给变量m,通过switch(m)来进行不同偏离情况的选择,根据实际情况,设置了case1,case3,case5,case7,case9,default这6 种情况,如图 5 控制策略简图5所示。
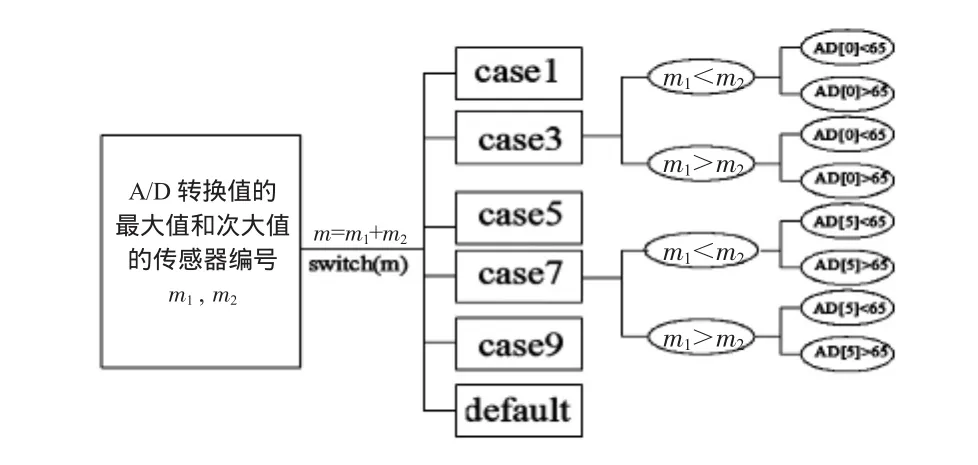
图5 控制策略简图Fig 5 Control strategy diagram
case1和case9为6种情况中智能车偏离导线最远的情况之一,因此,应该适当地减小电机的转速,并将舵机的转角增到最大;case3和case7为6种情况中智能车与导线产生一定偏离的情况,此时应该在直道车速的基础上稍减速,并将舵机转角由0°增大一些,由于系统判别case3和case7的情况一共有2种,第一种为直道由于机构原因发生些许偏移,第二种为智能车入弯或出弯,针对这2种情况同时选用了最边沿的2只传感器的数值作为分辨这2种情况的依据,由于2个边沿传感器如图7所示不是水平放置而是有一定的偏角,所以,在拐弯处表现更加灵敏,在实验中测得当出入弯时候对应编号的传感器的A/D转换值在65以上,而在直道中则很小,近似为0,通过这一条件的判别很好地解决了出入弯偏移和直道微偏的判别问题,但是在后续实验中又发现出弯和入弯是2种截然不同的情况,为了使智能车能快速运行,最好的控制策略是能够实现入弯减速(防止冲出路径),同时在出弯时候可以加速,以便在出弯后的直道上能够以最快速度运行,所以,通过设置定时中断来每隔2ms测一次当前的最大值和最小值对应的传感器序号的和,并存入数组M[5]中,以5次存储的M[5]数组作为出入弯的判别依据来进行判别,如果M数组的5个元素的和超出一定范围且第一次存储到M数组的元素值为5(由直道开始拐弯)时候则判断为在入弯,反之,则判断为出弯,假设车速为2m/s,则5×2ms×2000cm/s=20cm,即判定出入弯的反应距离为20 cm,同时智能车传感器又有20 cm前伸的前瞻,所以,满足测试要求,图6为出入弯判别程序框图。
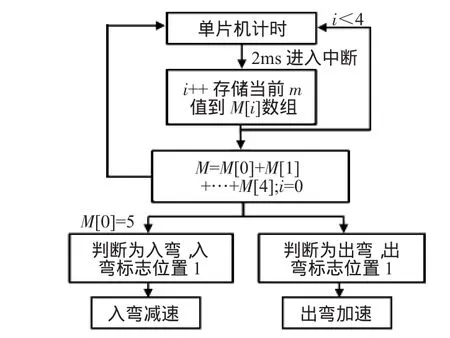
图6 出入弯判别程序框图Fig 6 Program diagram of turn-in and exit corner
case5为直道情况,将舵机对应地打到0°,并且将智能车速度增到最大;在未对default和case5进行相应的修改时,实验中发现传感器与导线在发生最大的偏差时候会出现判别失误,导致智能车冲出导航路径,通过多次实验发现有2种情况,第一种为传感器均位于导线右侧且偏离导线的距离较远,会出现只有最靠近导线的传感器有值即为最大值,则最大值的传感器编号为0,其余值全部为0,则次大值的传感器编号为0,其和为0,不满足case的5种情况,因此,用default来解决,即如果出现default则保持上一个检测状态(即左和右)的检测情况并把舵机转角打到上一个检测状态的最大值。第二种情况为传感器均位于导线左侧且偏离导线的距离较远,会出现只有最靠近导线的传感器有值即为最大值,则最大值的传感器编号为5,其余值全部为0,则次大值的传感器编号为0,其和为5,则与case5产生了判别失误,设最大值为m1,所以,在 case 5的程序中加入if(m1=5)即可,使得case5中以下控制程序判别如果最大值不等于5才可以进入直道的控制指令。针对以上2种情况的改进措施我们对控制程序进行了相应的改进,最终解决了传感器与导线在发生最大的偏差时候会出现判别失误、导致智能车冲出导航路径的问题。
4 传感器的布置
4.1 传感器高度的确定
为了防止传感器抖动对电感采集信号产生的过大影响,所以,在布置水平电感时选用了图3中从上往下数的第4根曲线所对应的高度,为8 cm,从图中可知在选取8 cm时,传感器上下抖动1 cm幅度(大于实际抖动范围)内,传感器所测到的感应电压仅发生很小的变化,抖动对传感器的正确测量基本上不会产生影响。所以,在布置传感器时选用了8 cm的高度。
4.2 传感器方向的布置
经过分析,最基本的导航路径有直道、弯道、十字交叉弯这3项,所以,传感器布置也是根据这3种不同的路径来进行分配布置的。
4.2.1 针对直道和弯道的传感器布置方案
根据前期的实验,初步选定了用6只传感器来进行对应的导线位置测量。分别左右各3个对称分布,如图7所示。

图7 初步选定的传感器布置方案Fig 7 Preliminary selected sensor arrangement plan
经过实验测得的实际数据可知,在由直线到90°直角弯路径转换时,该种布置方案的舵机做出反应的位置为传感器中心和导线偏差为5.5 cm且传感器已入弯13 cm时舵机才做出相应的摆角。此时明显入弯反应过慢,严重影响了智能车在转弯时候的速度。通过对入弯路径处磁场的分析,最终采用了如图8所示的传感器布置方案,该方案将最边沿的2只传感器进行了向内一定角度的偏移,以左拐为例由图8可知,在经过修改后拐弯处导线产生的磁感线与传感器的中心轴线的夹角变小,几乎接近于0°,由式(4)可知感应电压E变大。从而使得拐弯检测更加灵敏。经过实验测得改进的传感器布置方案舵机做出反应的位置为传感器中心和导线偏差减小为4.5 cm,且传感器已入弯距离减小为8 cm,如表1所示,从表中可以看出:改进后的传感器布置方案使得智能车的反映距离减小了5 cm,增大了小车转弯的前瞻,在一定程度上提高了小车转弯速度。

图8 改进后的传感器布置方案Fig 8 Improved sensor arrangement plan
4.2.2 针对十字弯道的传感器布置方案
为了防止智能车在拐弯的时候由于速度过快冲出路径,所以,控制策略中规定小车在检测到有偏移时,随即进行减速,但是,对于十字弯道进行270°转弯的特殊情况,小车的传感器必将全程都检测出在转弯,随即一直减速,导致智能车车速减得过多,速度过慢,从而大大地影响了智能车的平均速度,所以,十字弯道的检测也是至关重要的。如图9所示为十字弯道示意图和Matlab十字弯道磁场强度三维仿真图。

图9 十字弯道示意图和磁场强度仿真图Fig 9 Cross-shaped corner schematic diagram and magnetic field simulation diagram
从Matlab仿真图中可以看出:在十字型弯道中,磁场发生了很大的变化,使得在十字弯道中磁场的数值分量增大很多,与图3中的竖直传感器对应的小的磁场强度形成了鲜明的对比,所以,在传感器板子上端布置了2只对称分布的竖直的传感器通过其差值来进行十字弯道的判别,实验中测得在半径为50 cm的十字弯中两竖直传感器的A/D转换值之差会达到120左右,但是,在普通弯道和直道中却始终保持在40以下,所以,通过这一特征可以明显地判别出十字弯道。最终设计的传感器总体布置图为图10所示。

图10 最终完成的传感器布置方案Fig 10 Final sensor arranging scheme
5 实验结果
为验证智能车在进行相应的改进后的快速性和稳定性,在实验室自行搭建的路径上进行了实验,表1为改进前后实验数据对比表。
6 结论
电磁导航智能车使用飞思卡尔MC9S12DG128微控制器作为核心控制单元,自行设计了采集电磁信号的传感器信号采集电路,经过改进开发了电磁导航智能车的控制程序,分析了电磁信号的特性,针对特性和导航路径,进行了传感器的布置和搭配,最终实现了智能车平稳、快速地运行。

表1 改进前后实验数据对比表Tab 1 Contrast table of experimental data
[1]周 泉,王贵勇,贾现广,等.基于MC9S12DGl28B的智能模型车设计[J].昆明理工大学学报:理工版,2010,35(5):37 -40.
[2]王元哲,谈英姿.磁导航智能车路径信息采集系统的设计与实现[J].微型机与应用,2011,30(1):19 -22.
[3]卓 晴,黄开胜,邵贝贝.学做智能车[M].北京:北京航空航天大学出版社,2007:10-50.
[4]张吴飏,马 旭,卓 晴.基于电磁场检测的寻线智能车设计[J].电子产品世界,2009(11):48-50.
猜你喜欢
文史春秋(2022年4期)2022-06-16
数学大王·趣味逻辑(2021年3期)2021-03-10
自动化学报(2019年6期)2019-07-23
汽车观察(2018年12期)2018-12-26
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
数学大世界(2018年1期)2018-04-12
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
电测与仪表(2015年16期)2015-04-12
