
基于ADAMS的挖掘机虚拟样机模型的建立
2012-07-25 07:11:58郭晓宁曾彬彬
中国工程机械学报 2012年4期
郭晓宁,曾彬彬
(福州大学 机械工程及自动化学院,福建 福州 350000)
在ADAMS中建立液压挖掘机机械系统模型首先要建立构件的实体模型,因为ADAMS的实体建模功能比较弱,所以现在在ADAMS建立机械系统三维实体模型的方法一般是首先在Pro/E,SolidWorks等专业的三维CAD建模软件中建立模型,然后通过CAD软件与ADAMS软件之间的接口,将其导入到ADAMS中.这种建模方式的不足之处在于:对于从CAD软件中导入的模型,需要在ADAMS软件中重新定义其约束及质量和质心的位置等;另外,在ADAMS中不能对这些导入构件的尺寸参数进行修改,从而导致无法进行参数化分析.要修改模型的参数,只能在CAD软件修改后再重新导入到ADAMS软件中进行模拟仿真,这样往往会浪费大量的时间和精力来进行这种单调重复的建模工作.
文献[1]采用CAD和测得的数据对液压挖掘机三维模型进行创建;文献[2—7]采用对液压挖掘机的机构模型与CAD三维模型分别建模的方法,利用ADAMS建立液压挖掘机的机构模型,采用Por/E建立其三维模型,并与ADAMS中的机构模型进行集成,在此模型上进行运动学和动力学的仿真研究.
本文用ADAMS提供的参数化建模和二次开发技术,在ADAMS中建立液压挖掘机工作装置的三维参数化实体模型并实现建模的自动化.
1 基于ADAMS的挖掘机机械系统实体参数化建模
在建立虚拟样机模型时,既要满足虚拟样机仿真的功能性要求,又要尽量简化模型,所以建模时,忽略实际挖掘机工作装置千差万别的结构形式,而着眼于这些不同的结构形式所蕴含的共性特点.按照是否存在相对运动,实际的挖掘机机械系统抽象后得到构件:动臂、斗杆、铲斗、铲斗连杆和摇臂.
1.1 动臂模型的结构参数
图1为建立动臂实体参数化模型所需要的所有结构参数,在这些结构参数中,根据对模型结构的影响大小,将其分为主控制参数和辅助控制参数,其中主控制参数在建模时必须由设计人员通过对话框输入,而辅助控制参数可以由主控制参数来表示.动臂结构主控制参数和辅助控制参数分别如表1和表2所示.
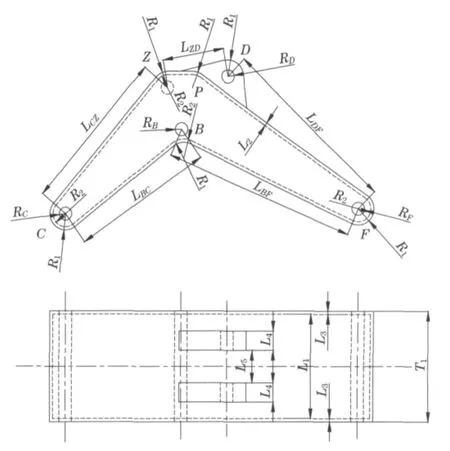
图1 动臂实体参数化模型结构参数示意图Fig.1 Structure parameter sketch of boom parmetric model
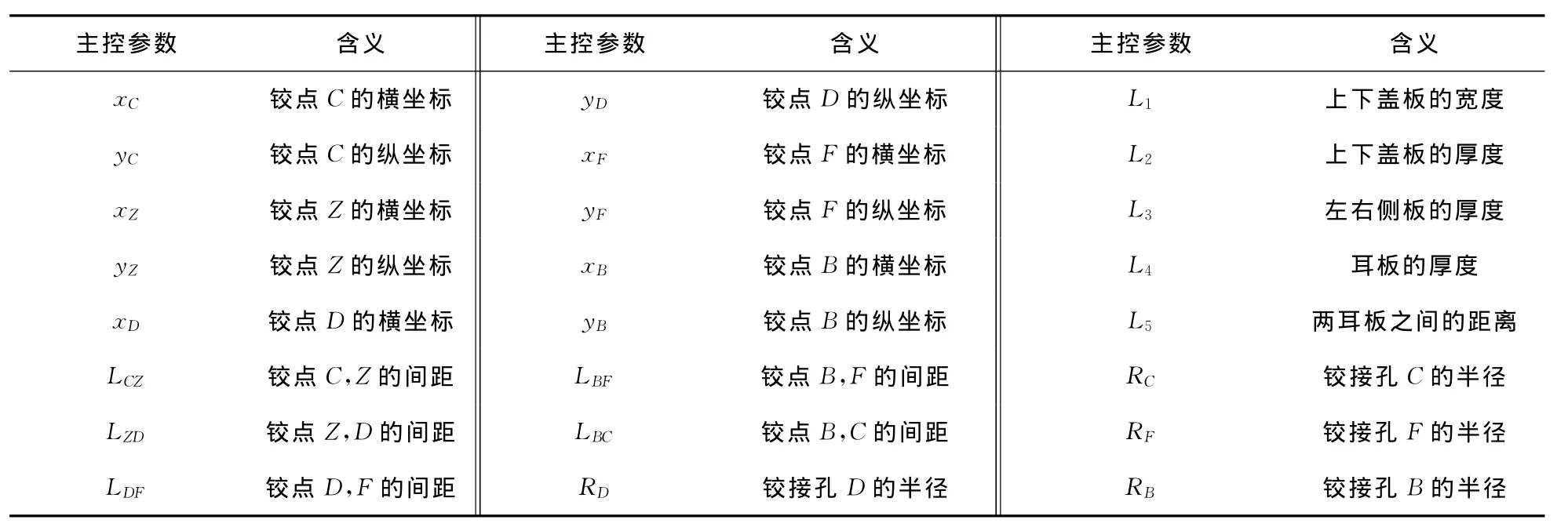
表1 动臂实体参数化模型主控制参数说明Tab.1 Major structure parameters of boom parametric model
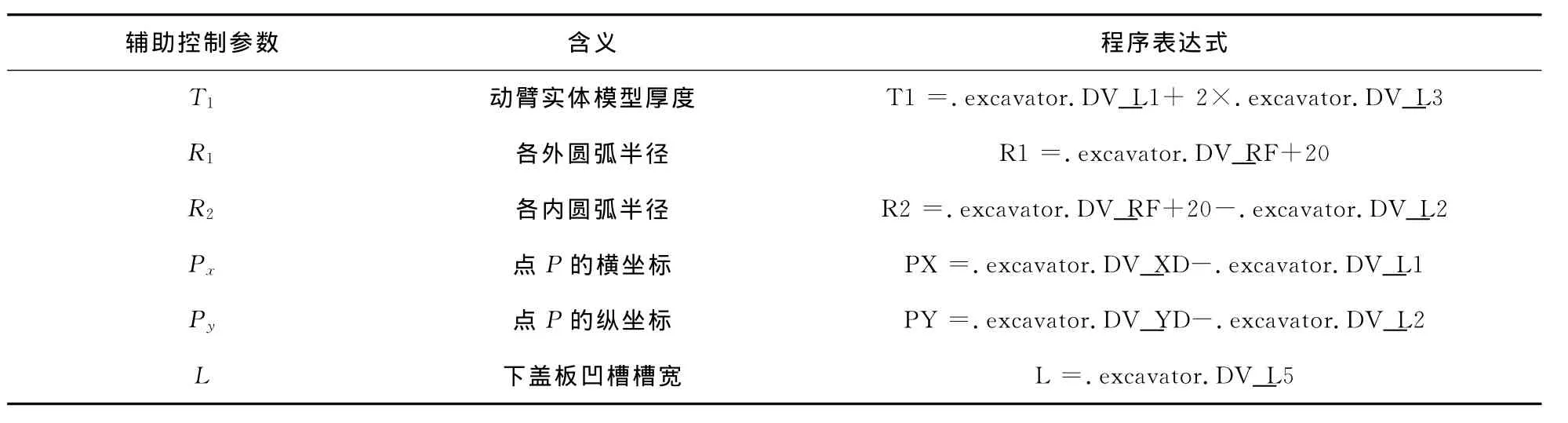
表2 动臂实体参数化模型辅助控制参数Tab.2 Secondary structure parameters of boom parametric model
1.2 斗杆实体参数化模型的建立
反铲式液压挖掘机的斗杆一般是宽度相同、左右相互对称且整体封闭的箱型焊接结构件,图2为建立斗杆三维实体参数化模型所需要的结构参数,其中主控参数和辅控参数分别如表3和表4所示.
图2 斗杆实体参数化模型结构参数示意图Fig.2 Structure parameter sketch of arm parmetric model
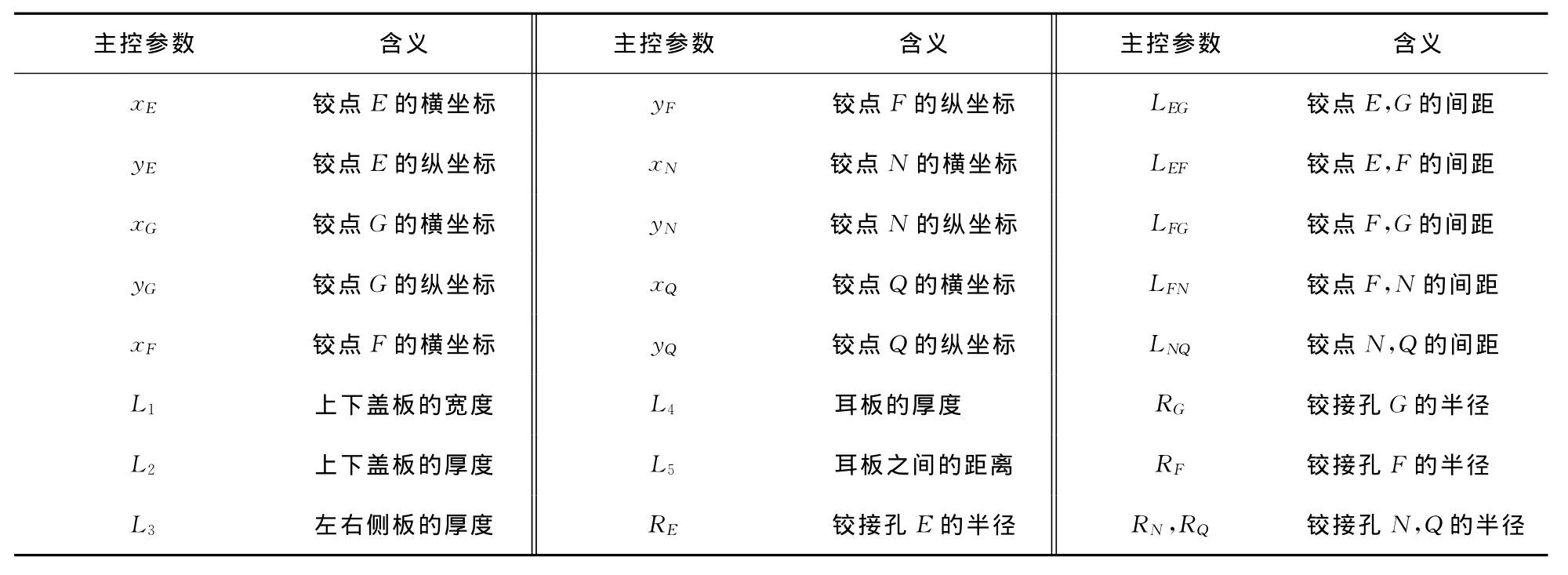
表3 斗杆实体参数化模型主控制参数说明Tab.3 Major structure parameters of arm parametric model

表4 斗杆实体参数化模型辅助控制参数Tab.4 Secondary structure parameters of arm parametric model
1.3 铲斗实体参数化模型
铲斗一般为整体式对称结构,可以分为斗腔、斗齿、支座和加强部分等.图3为建立铲斗实体参数化模型所需要的结构参数,其主控参数和辅控参数分别如表5和表6所示.
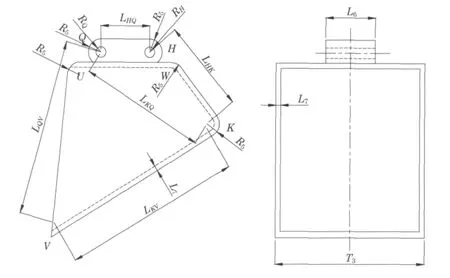
图3 铲斗实体参数化模型参数示意图Fig.3 Structure parameter sketch of bucket parmetric model

表5 铲斗实体参数化模型主控参数说明Tab.5 Major structure parameters of bucket parametric model
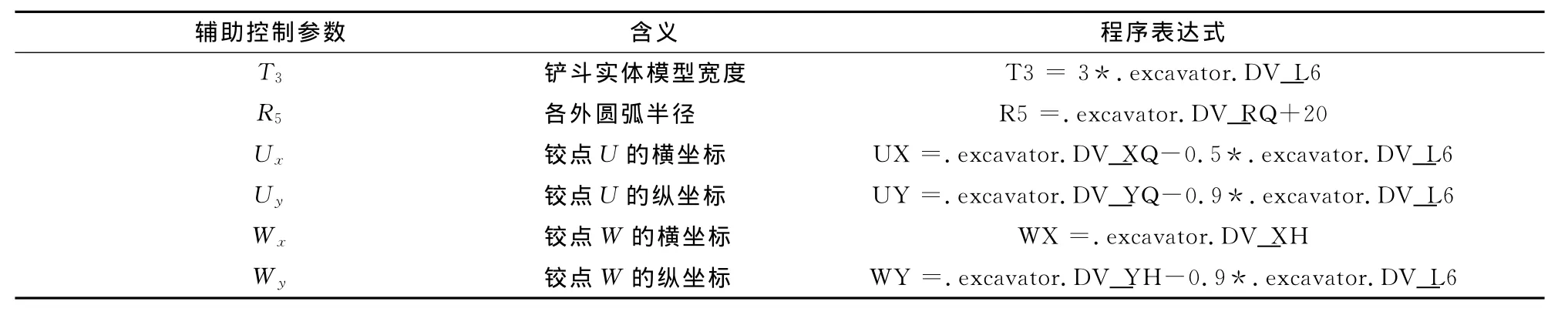
表6 铲斗实体参数化模型辅控参数Tab.6 Secondary structure parameters of bucket parametric model
2 基于ADAMS/VIEW命令语言建立挖掘机实体参数化模型
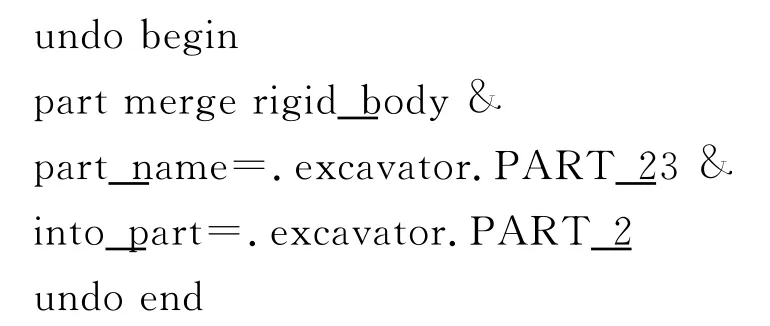
限于篇幅,仅以动臂为例,来说明利用ADAMS/View提供的命令语言建立动臂实体参数化模型的方法与步骤:
(1)以LCZ,LBC,LBF,LZD,LDF,RF,L1和L2为输入变量创建上下盖板(如图4所示).部分程序如下:


(2)以LCZ,LBC,LBF,LZD,LDF,RF,L1和L3为输入变量创建左右侧板,并与上下盖板进行布尔运算,得到动臂箱体,如图5所示(程序略).

图4 创建动臂模型上下盖板Fig.4 Upper and lower plate of boom model

图5 创建动臂左右侧板Fig.5 Left and right side plate of boom model
(3)以LZD,LDF,RF,L1,L2,L4和L5为输入变量创建耳板,并与(2)中生成的模型进行布尔运算,得到含有耳板的动臂箱体,如图6所示(程序略).
(4)以RB,RC,RD,RF,L1和L3为输入变量建立铰接孔,创建好的动臂实体参数化模型如图7所示(程序略).

图6 创建动臂模型耳板Fig.6 Ear plate structure of boom model

图7 动臂的实体参数化模型Fig.7 Parametric model of boom
(5)将动臂的抽象机构模型和参数化实体模型进行集成.
按照类似的方法创建斗杆、铲斗部件的三维实体参数化模型分别如图8和图9所示,创建后的液压挖掘机工作装置三维实体参数化虚拟样机模型如图10所示.

图8 斗杆的实体参数化模型Fig.8 Parametric model of arm

图9 铲斗实体参数化模型Fig.9 Parametric model of bucket
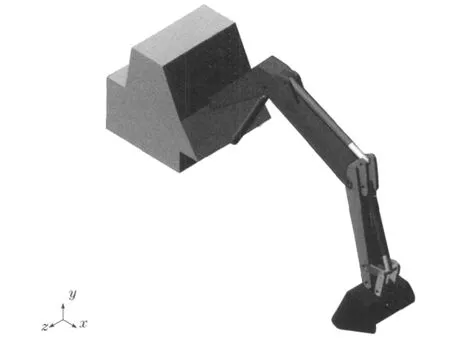
图10 液压挖掘机工作装置虚拟样机模型Fig.10 Virtual prototype model of the hydraulic excavator working device
3 液压挖掘机工作装置参数化建模的用户化设计
在液压挖掘机的设计过程中,为了得到最优的结构参数,需要不断修改液压挖掘机的结构参数,为此,利用ADAMS/View提供的二次开发功能,将上述建模过程自动化,在ADAMS/View中开发了一个液压挖掘机结构设计专用模块,定制了用户化设计界面.
3.1 定制用户化菜单
作为专用模块的入口,首先在ADAMS/View的主菜单上增加专用菜单项及相应的菜单列表.本文中,主界面用户菜单是在ADAMS/View主界面菜单栏上由用户插入的Excavator用户菜单项及其相应下拉菜单,主界面用户菜单的建模部分的菜单如图11所示.
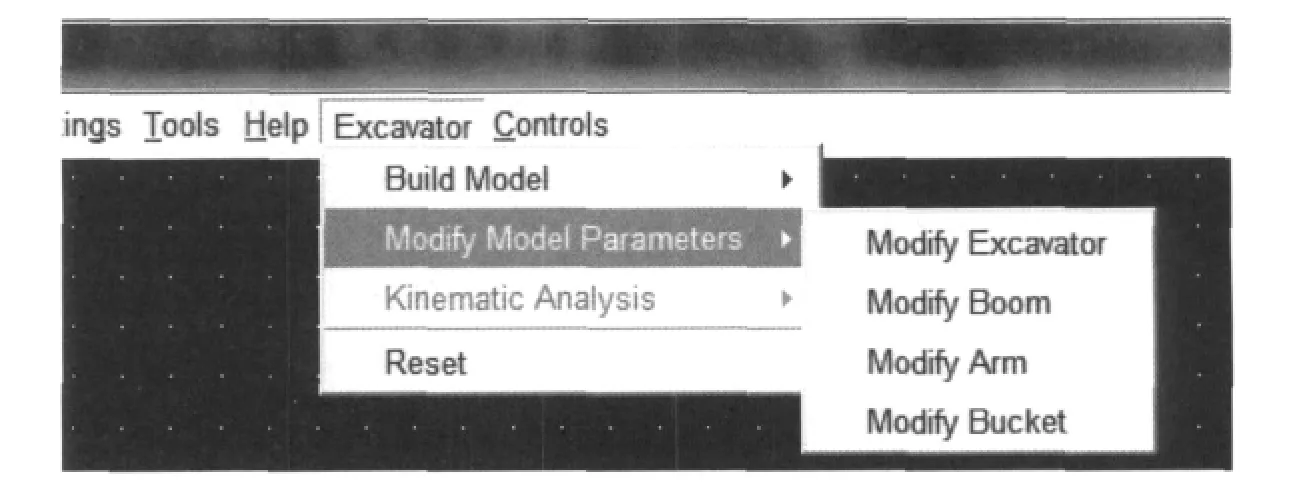
图11 用户菜单项Fig.11 User menu
3.2 定制用户化对话框
对话框是人机交互的常用界面形式之一,设计人员可以通过对话框方便地修改参数.本文中参数设置对话框是通过创建宏而建立的.如图12所示为建立动臂模型参数输入对话框.
4 结论
本文利用ADAMS/View提供的参数化和二次开发功能,建立了液压挖掘机工作装置三维参数化实体机械系统模型,在ADAMS/View中建立了一个用户化模块,实现了参数化建模的自动化.运用此模块,可以大大地减少虚拟样机建模的时间.
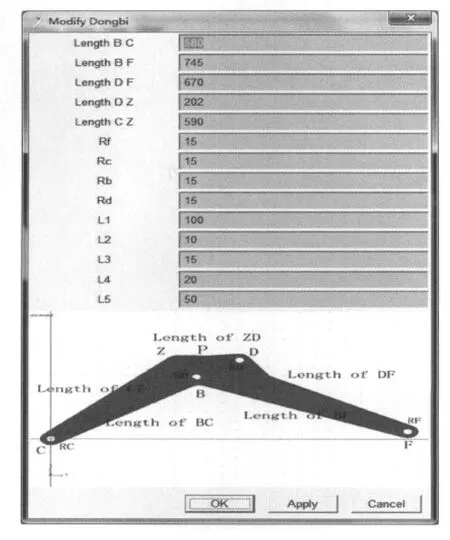
图12 动臂模型控制参数设置对话框Fig.12 Dialog box of inputing boom model control parameter
[1]TOMI M,KELERVO N,RSUNO H.A 3Dmodel based control of an excavator.[J]Automation in Construction,2006,15:571-577.
[2]刘静.挖掘机器人虚拟样机建模技术及其应用研究[D].杭州:浙江大学,2005.
LIU Jing.Investigation on modeling of a virtual robotic excavator prototype and the application technology[D].Hangzhou:Zhejiang University,2005.
[3]刘静,潘双夏,冯培恩.挖掘机器人虚拟样机建模策略与仿真技术研究[J].浙江大学学报:工学版,2004,38(11):1490-1495.
LIU Jing,PAN Shuangxia,FENG Peien.Modeling and simulation of virtual robotic excavator prototype[J].Journal of Zhejiang University:Engineering Science,2004,38(11):1490-1495.
[4]郭晓宁.基于 ADAMS的液压挖掘机机械系统参数化模型[J].中国工程机械学报,2008,6(4):433-437.
GUO Xiaoning.The parameterized model for the mechanical system of hydraulic excavator based on ADAMS[J].Chinese Journal of Construction Machinery,2008,6(4):433-437.
[5]王建军,冯光金,占必红,等.小型挖掘机工作装置三维建模及有限元分析[J].中国工程机械学报,2011,9(1):63-67.
WANG Jianjun,FENG Guanjin,ZHAN Bihong,et al.Three-dimensional modeling and finite element analysis on working devices for small-size hydraulic excavators[J].Chinese Journal of Construction Machinery,2011,9(1):63-67.
[6]丁国富.液压挖掘机虚拟样机的实现方法和技术研究[D].杭州:浙江大学,2001.
DING Guofu.Study on method and technology of virtual prototype of hydraulic excavator[D].Hangzhou:Zhejiang University,2001.
[7]丁国富,吴晓,王金诺.机器人化液压挖掘机的运动学建模和仿真研究[J].机械科学与技术,2000,19(5):736-737.
DING Guofu,WU Xiao,WANG Jinnuo.Research on the kinematics of modeling and simulating of robotized hydraulic excavator[J].Mechanical Science and Technology,2000,19(5):736-737.
猜你喜欢
液压与气动(2024年4期)2024-04-25 10:58:58
机械设计与制造(2022年7期)2022-07-27 13:53:58
飞控与探测(2022年6期)2022-03-20 02:16:14
科学技术创新(2020年32期)2020-11-05 09:51:54
力学学报(2020年4期)2020-08-11 02:32:12
消费导刊(2020年1期)2020-07-12 08:00:34
成组技术与生产现代化(2019年3期)2020-01-14 02:11:58
金属加工(热加工)(2018年10期)2018-10-26 08:04:36
建筑机械化(2018年6期)2018-06-29 08:18:56
黑龙江电力(2017年1期)2017-05-17 04:25:08
