基于产品组态图的跟踪创新方法研究
2012-07-25 04:04张勇为顾新建黄沈权
中国机械工程 2012年10期
张勇为 顾新建 黄沈权
浙江大学,杭州,310027
0 引言
我国机械制造业技术创新整体水平不高,产品国际竞争力不强,高端产品领域缺乏自主知识产权的核心技术。面对当今快速变化的市场需求,我国机械制造业企业唯有重视产品的自主创新[1],才能够在竞争日益激烈的全球化市场中得以健康生存和可持续发展。跟踪创新(消化吸收再创新)是后发企业实现技术进步的捷径[2],它与原始创新和集成创新共同构成自主创新的三大模式[3-4]。从我国机械制造业的产品现状和技术创新发展水平看,具有技术平台高、见效较快、成本较低等特点的跟踪创新,在目前及今后的一个时期内,必将是多数国内机械制造业企业产品技术创新开发战略的首选。
概念设计是产品设计过程中最具体现人类创造性的环节,而且概念设计环节的缺陷和错误将在后续设计中无法弥补[5]。国内外已有学者对创新概念设计方法做了大量的研究,并取得了丰硕成果,譬如 产 品 创 新 开 发 模 板 理 论[6-7]、TRIZ 技术进化理论[8-9]等。前者最早由美国学者 Goldenberg和Mazursky提出,该理论将创新设计看作是一种系统化实现由产品的早期组态向随后产品组态变化发展的过程,并从创造心理学角度概括总结了4个基本操作模板[7],即属性依赖模板、替换模板、转移模板和组件控制模板。但是,使用产品创新开发模板理论,无法帮助设计人员克服心理惯性影响,保证获得创新概念设计问题的最优解。帮助设计人员打破“思维惯性”,明确产品和技术的进化发展趋势,快速产生创新设想,则是TRIZ技术进化理论最重要的特点[2,10]。因此,有必要将产品创新开发模板理论和TRIZ技术进化理论结合起来进行研究,从而促进提升企业产品创新成功率和效率。
本文研究一种基于产品组态图的跟踪创新方法,促进实现产品创新开发模板理论和TRIZ技术进化理论在机械产品创新概念设计过程中的集成应用,以期能为我国机械制造业产品自主创新发展提供帮助。
1 产品组态图概述
产品作为技术系统,处在进化状态。产品组态图(product configuration diagram,PCD)是产品组成结构系统的“快照”,能够较为完整地反映产品(技术系统)的基本信息,如图1所示。组件和功能是构成产品组态图的基本要素。
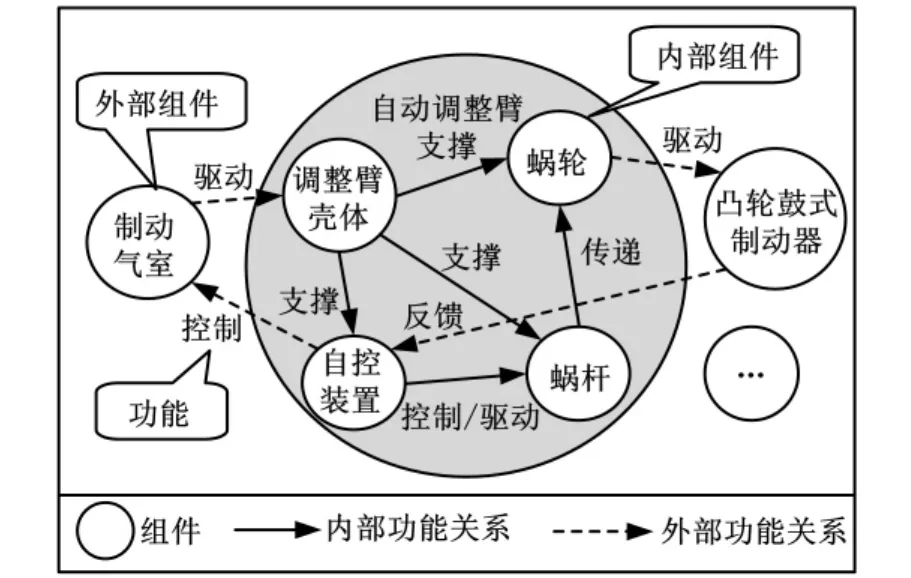
图1 自动调整臂组态图
组件是产品的组成部分,以及对产品有直接影响的外部元素[11]。通常,一个产品由若干个不同层次、不同粒度的组件构成,既有内部组件,又有外部组件。功能是组件在产品系统中的作用,以及不同组件功能之间的相互作用和因果关系[12]。产品组态图中的功能要素主要描述的是后者,常用的功能术语和词汇包括“控制”、“驱动”和“支撑”等。集成小粒度组件可以产生大粒度组件;反之,大粒度组件又可以分解为若干个小粒度组件。组件通过实例化内部成员来实现功能,组件和组件实例之间存在“一对多”的映射关系,即一个组件可以实例化为不同的组件实例。
产品组态图对促进企业发展产品跟踪创新的意义主要在于:
(1)通过构建产品组态图,可促进帮助设计人员捕获产品原设计者的设计意图,消化吸收其内在技术,快速发现和确定其存在的问题和不足。因此,对企业和个人的产品技术创新能力的提高、技术资源的积累显然都具极为重要的意义。
(2)分析待改进产品及现有可选产品的组态图,有助于利用TRIZ技术进化理论快速产生创新设想,指导高效完成从待改进产品组态图到跟踪创新后产品组态图的快速变换,并最终产生跟踪产品待选的创新概念设计方案。
2 基于组态图的跟踪创新过程
如图2所示,基于产品组态图的跟踪创新过程主要包括两个阶段:①产品组态图的构建,包括待改进产品及其所有可选产品。常见的方法是通过解析产品组成结构系统中各部件的物理结构和工作行为状态,从功能、结构等角度发现和识别其包含的所有组件及组件间的功能链接关系,绘制产品组态图。②基于组态图的创新设计。首先对比分析待改进产品及其所有可选产品的组态图,明确产品不足之处及可以改进的组件(实例),然后运用技术进化路线快速产生创新设想,以指导待改进产品组态图实施变换操作,从而发展出新的产品组态图,并最终落实为跟踪创新后产品待选的概念设计方案。
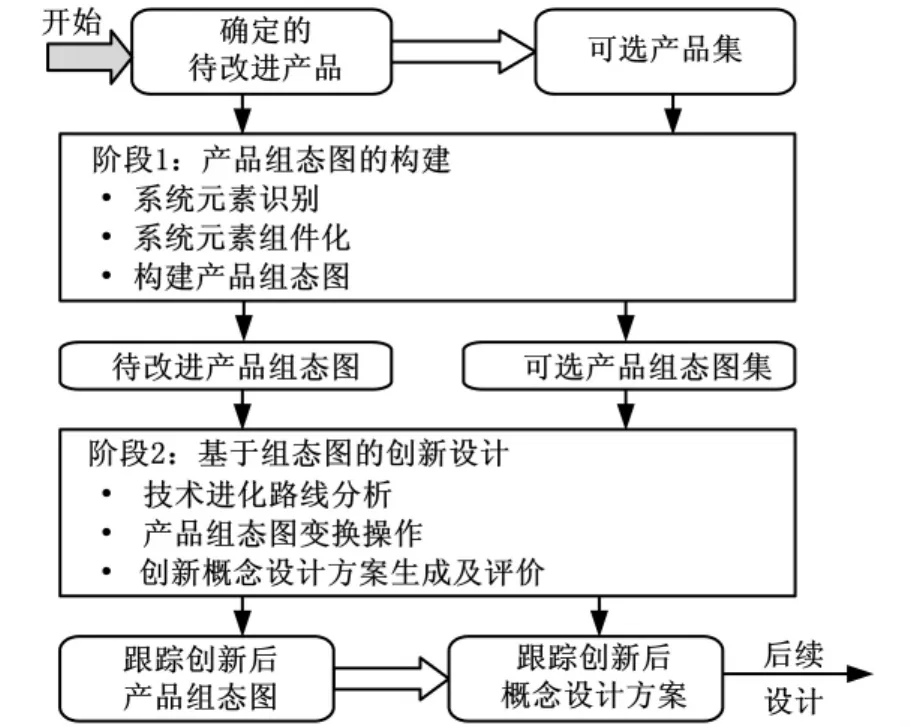
图2 基于产品组态图的跟踪创新过程
3 产品组态图的构建过程
获取产品组成结构系统(物理结构)的描述信息是构建产品组态图的前提和基础工作。主要有两种途径:①通过收集市场现实产品信息,采用类似逆向工程的分析方法获得;②从世界大量专利中获得。目前,世界各国专利库中的专利每年以百万数量级在递增,90%~95%的人类技术创新成果可以在专利文献中查到,专利文献对技术创新成果做了全面详细的描述,可达到该领域内一般人员可借鉴的程度[13]。因此,专利信息是构建产品组态图所需信息最主要的、也是取之不竭的资源源泉。
如图3所示,从产品组成结构系统出发,构建产品组态图需要经历三个步骤:系统元素识别、系统元素组件化和基于已获取组件建立组态图。
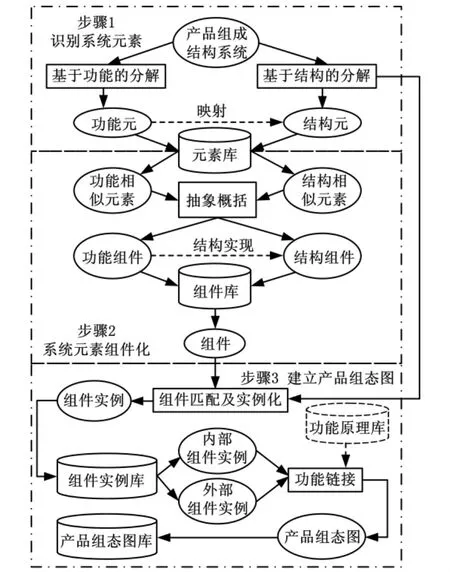
图3 建立产品组态图的过程模型
(1)系统元素识别。这里的系统元素指的是组成产品组成结构系统的基本单元,包括系统功能元和系统结构元。结构是功能的载体,功能最终要映射到结构、由结构来实现[11]。系统元素的粒度由分解的角度和深度决定,例如表1;同时,系统元素的粒度又决定组件的粒度。根据公理设计理论[14],提取和界定系统元素应尽量满足独立最有效、耦合度最小和高内聚性等原则。通过系统化分析待改进产品及其所有可选产品的组成结构系统,识别和确定最优粒度系统元素,可以建立系统元素库。
对于表1中所给出的“粒度1”,根据TRIZ技术进化理论中的技术系统完整性定律[15]来提取和定义系统元素是一种较为有效的方式。即按照工作原理把总功能(FR0)分为执行功能单元(FR1)、能量产生功能单元(FR2)、能量传递功能单元(FR3)和控制功能单元(FR4),在此基础上,再继续分解为一系列独立的子功能集,其拓扑结构如图4所示。执行功能单元完成产品的主要功能,其工作原理的改变意味着产品发生了重大进化,也是判断产品升级换代的重要依据,其他单元完成产品的辅助功能。
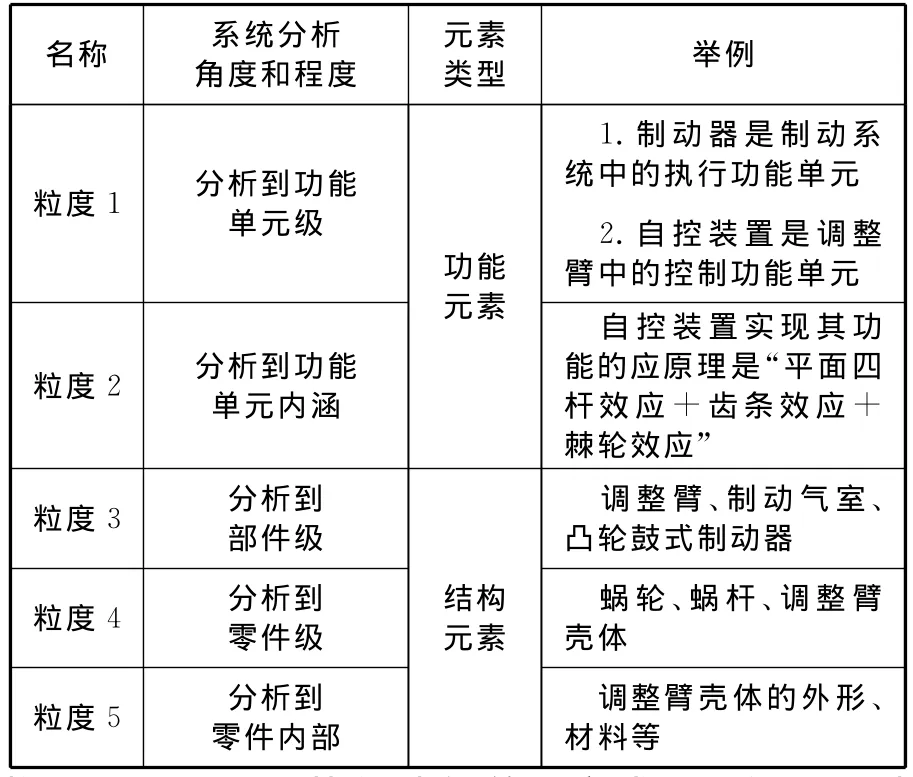
表1 几种系统元素粒度的简要说明
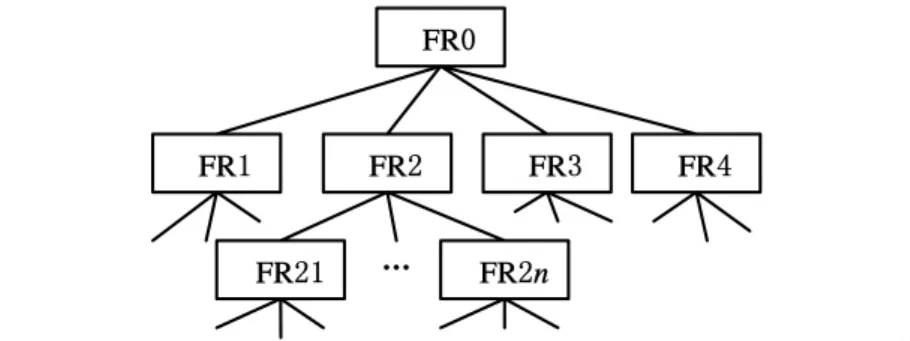
图4 产品功能分解拓扑结构图[15]
(2)系统元素组件化。它是一个将系统元素聚类并采用一定模型来形式化和结构化表述每类系统元素的过程。每一类系统元素可以概括抽象为一个组件,若干组件又可以聚合成一个新的组件,形成组件库,组件具有层次性特征。不同组件的表述模型往往也是不同的。由于确定组件受制造环境、技术发展水平、市场需求以及个人或群体能力等因素影响,所以不同时期不同企业对同一类产品建立的组件库是不尽相同的。
(3)基于已获取组件建立组态图。反过来,在已建立的组件库的支持下,对待改进产品及其所有可选产品的组成结构系统作进一步分析,从组件库中提取它们包含的各内部组件和相关的各外部组件,并进行实例化;从功能原理库中匹配和获取恰当的功能表述来确定和建立关联组件实例之间的功能链接,从而获得它们各自的产品组态图。
上述涉及的元素库、组件库、组件实例库、功能原理和产品组态图库,一经建立可重用,可根据需要进行动态更新。通过利用元素库、组件库和产品组态图库来建立产品组态图,将有助于保证产品组态图真实表述组成产品结构系统,以及支持协同共建产品组态图。
4 基于组态图的创新设计过程
基于产品组态图的创新设计是一个重复迭代、深入发展的过程,如图5所示,主要包含三个步骤。
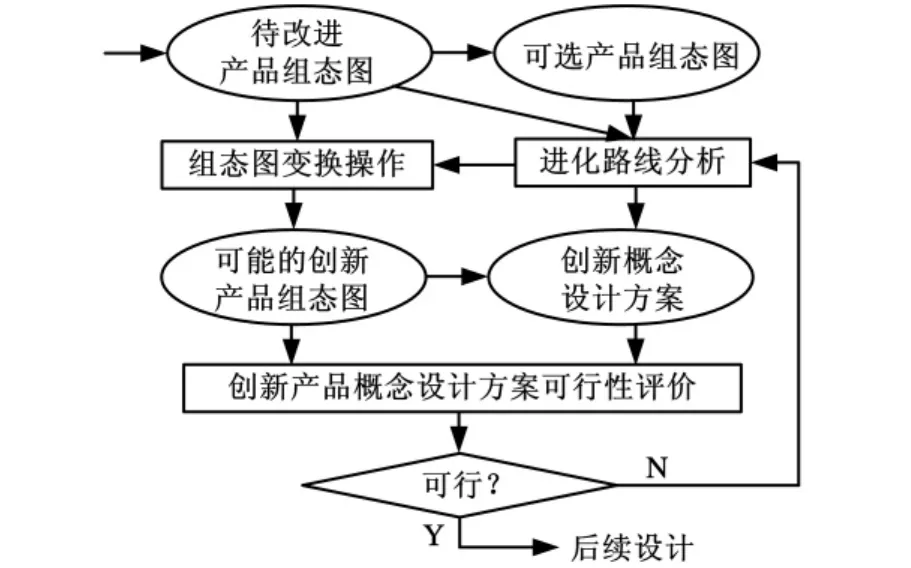
图5 基于组态图进行创新设计的过程模型
首先,对比分析待改进产品及其各可选产品的组态图之间的变化,初步确定跟踪创新的关键组件,通过搜索该类产品及各关键组件具有进化潜力的技术进化路线,发现潜力状态和遗漏状态,从而快速产生创新设想;然后,进一步分析和综合这些创新设想,并在其导向下完成对待改进产品组态图作恰当的变换操作,从而产生新的产品组态图,并落实为跟踪创新后产品的概念设计方案;最后,根据企业内部已有的资源储备情况,以及外部可获得资源情况,并结合客户和市场需求,对已获得的跟踪创新后的产品概念设计方案进行可行性评判。
4.1 组态图变换操作
根据产品创新开发模板理论,创新设计实质上就是实现产品由早期组态图向随后组态图的系统变化的过程,即推动产品组成结构系统(技术系统)演化。因此,产品随后组态图可以看作是在早期组态图上实施一系列变换操作而得到的。
如图6所示,这些组态图变换操作可以概括为如下几种[7]:包含和排除、链接和解开、分裂和结合。
(1)包含和排除。包含操作行为是向产品组态图中引入一个外部组件;排除操作行为是引出一个被解开的组件,使该组件由内部组件转变成外部组件。
(2)链接和解开。链接操作行为是链接两个非链接的组件;反之,则为解开操作行为。
(3)分裂和结合。分裂操作行为是从链接中移走一个内部组件,但链接的功能被保留,从而创造出一个过渡的组态,可以通过引入一个替代的组件(实例)来执行其功能;结合操作行为是从产品组态图中加入一个新的组件到一个分裂的链接。
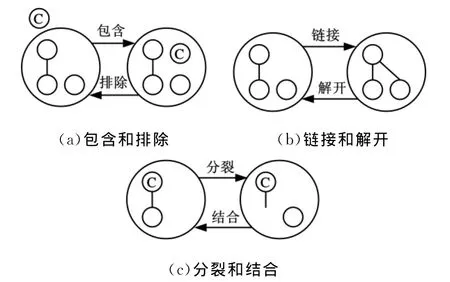
图6 组态图变换操作
4.2 进化路线分析
技术进化模式/路线是TRIZ技术进化理论的基础和核心[9],反映了产品进化技术过程中系统的元件之间或系统和环境之间重要的、稳定的、可重复的交互作用,可应用于产品进化技术预测,指导创新概念设计。脱离特定环境和抛开各种限制条件以理想化定义问题的最终解,技术进化路线指明了理想解的发展趋势,从而帮助设计人员确定创新设计方向,所提供的各发展趋势上的具体进化状态特征序列,又可以支持快速产生创新设想甚至是更为具体概念设计方案,因此可显著提升产品跟踪创新的效率和成功率。
如图7所示,每条进化路线有若干个进化状态,通过搜索待改进产品及各组件有进化潜力的进化路线,定位它们在这些相关进化路线上所处的进化状态,查找和发现潜力状态和遗漏状态,从而快速产生待改进产品的若干个创新设想,有效指导产品组态图变换操作,可极大提高跟踪创新设计的效率。技术进化模式仅仅指出了产品进化的大致方向,并不涉及具体细节。目前已发展了20种进化模式和350条进化路线[9]。
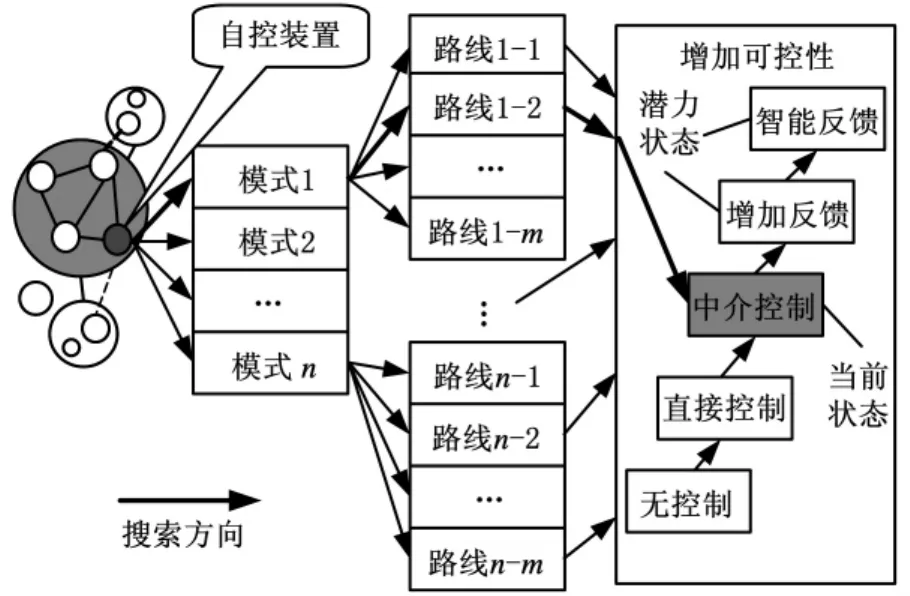
图7 基于组态图和技术进化路线搜索创新设想
如图7所示,“增加可控性进化路线”是组件“自控装置”的有进化潜力的技术进化路线之一,若在待改进产品中与之对应的组件实例是处于进化状态“间接控制系统”,则基于该进化路线可获得的创新之一就是用“反馈控制系统”替代“间接控制系统”,即可通过对当前产品组态图的组件“自控装置”进行分裂和结合来实现。
5 案例分析
自动调整臂(automatic slack adjuster,ASA)在国外已是成熟技术,载重车、客车及挂车等制造商近年来均已将其作为整车的标准配置。但在我国,自动调整臂技术尚还处于起步阶段。现以专利US4749063作为待改进产品,如图8所示,对本文所提出的产品跟踪创新方法进行可行性验证。
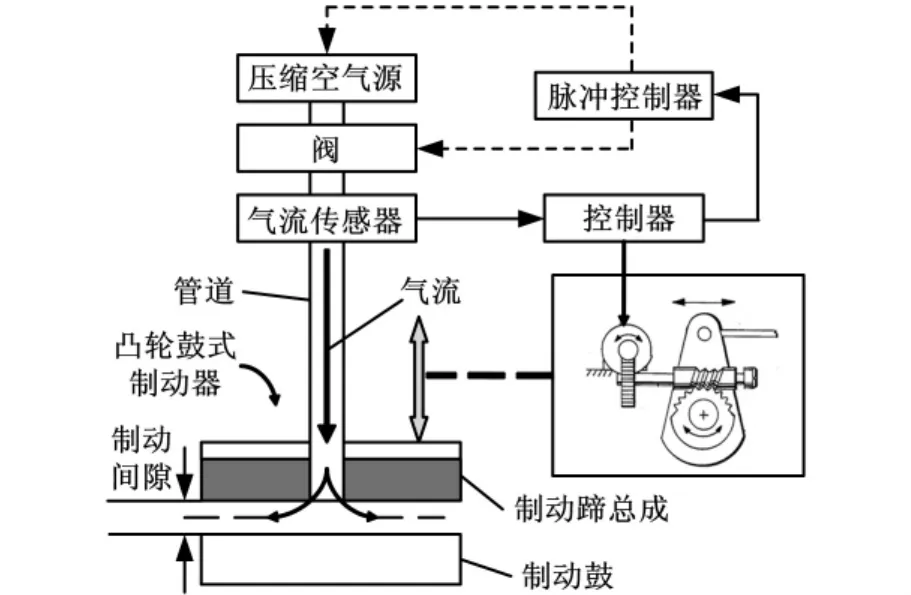
图8 自动调整臂(US4749063)原理图
5.1 构建产品组态图
首先,分析专利US4749063的产品系统结构,以及其各可选产品的系统结构,可以获得“调整臂壳体”、“自控装置”、“自控装置的效应原理”、“制动气室推杆行程”、“凸轮驱动轴角位移”、“制动蹄总成”、“制动鼓”等多个系统元素,从而构建自动调整臂的系统元素库。然后,对自动调整臂的系统元素进行聚类、概括和抽象,可以获得“调整臂壳体”、“自控装置”、“制动气室”、“凸轮驱动轴”、“制动蹄总成”等组件,从而构建自动调整臂的组件库。最后,以自动调整臂的组件库中的组件为基础,分别绘制专利US4749063及其各可选产品的组态图。如图9所示,给出了专利US4749063及其两种典型可选产品的组态图(部分)。在实际实施中,该过程是一个反复迭代、逐步深入完善的过程。
5.2 创新概念设计
对比分析专利US4749063及其各可选产品的组态图后发现:自动调整臂的系统结构历时变化大多与组件“自控装置”有关,而其他组件诸如“调整臂壳体”、“蜗轮”和“蜗杆”等则相对稳定。表2列举说明了几个“自控装置”的组件实例及结构化表述。
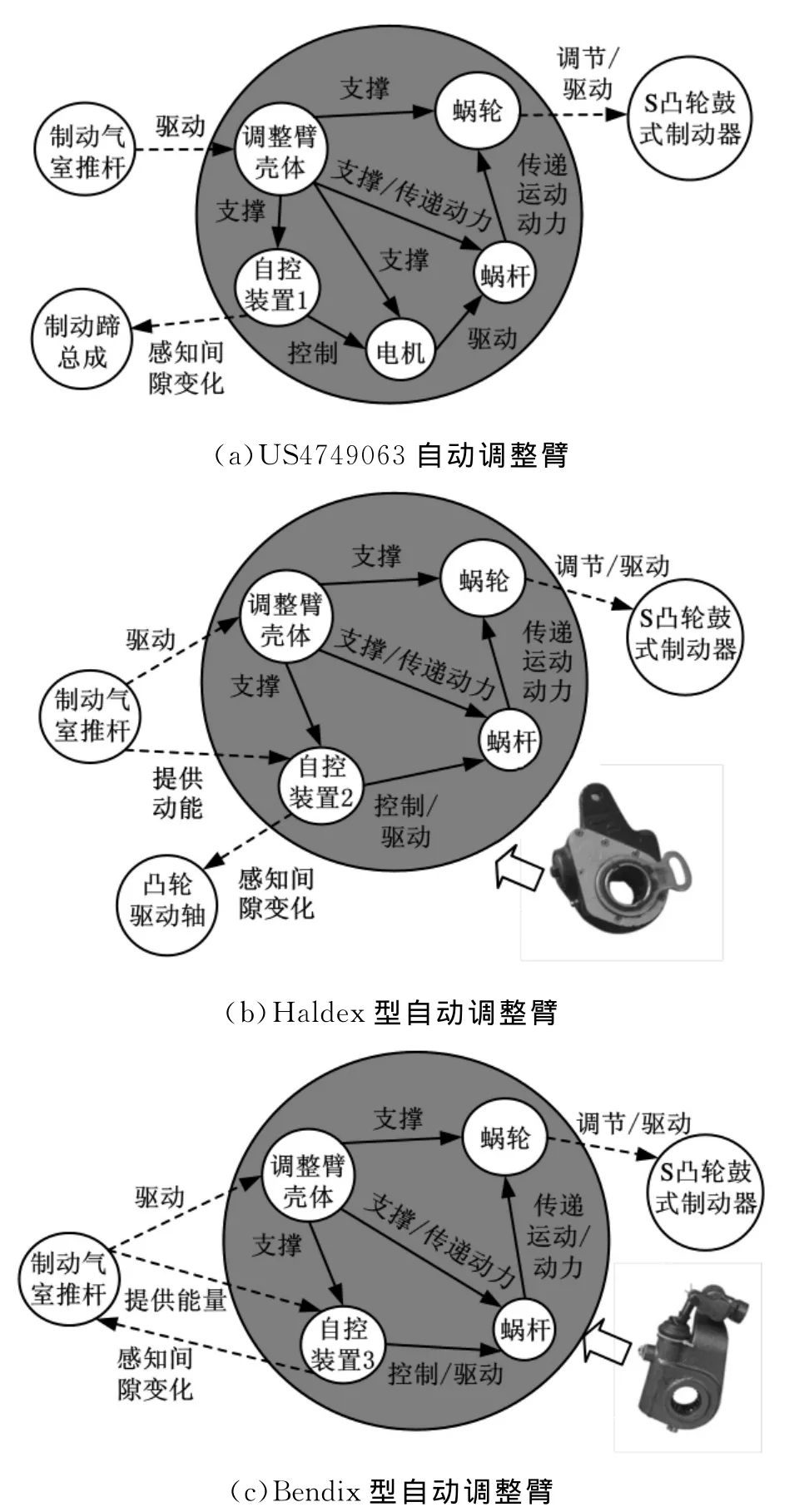
图9 US4749063及其可选产品的组态图(部分)
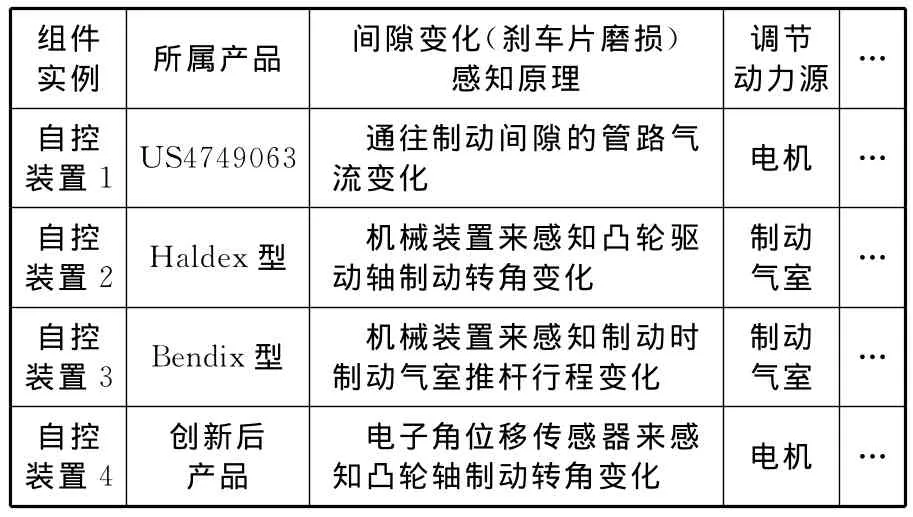
表2 部分“自控装置”组件实例及结构化表述
应用TRIZ技术进化理论分析组件“自控装置”的理想化趋势,发现其满足技术进化路线“增加可控性(无控制→直接控制→中介控制→增加反馈→智能反馈)”和“场(固体→弹性体→液体→气体→电磁场→光场)”。“自控装置1”、“自控装置2”和“自控装置3”在“增加可控性”进化路线上都处于“增加反馈”进化状态;而在“场”进化路线上,这里主要从感知原理的角度考虑,“自控装置1”处于“气体”进化状态,“自控装置2”和“自控装置3”则处于“弹性”进化状态。因此,可以产生创新设想:将“自控装置4”替代“自控装置3”,发展专利US4749063的跟踪产品概念设计方案。
其中,“自控装置4”是组件“自控装置”的实例,其技术水平应用技术进化路线可以表述为“增加可控性(智能反馈)”和“场(电磁场)”。在这一创新设想导向下,通过对US4749063自动调整臂组态图进行一系列变换操作后,可以得到如图10所示的跟踪创新后的产品组态图,以及产品概念设计的结果,该产品已申请专利保护(中国专利申请号:CN201010235569.8)。
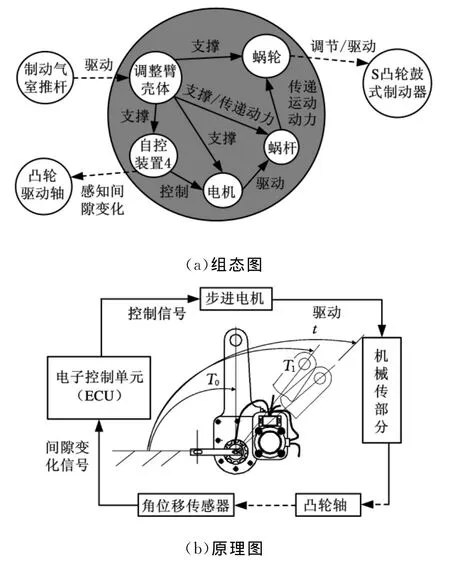
图10 跟踪创新后的产品组态图及工作原理图
6 结束语
首先,在分析待改进产品及可选产品的系统结构基础上,提取最优粒度的系统元素定义组件,绘制各与之对应的产品组态图;然后,对比分析产品组态图,发现和确定待改进产品可以改进的组件,从而大致定位跟踪创新的突破口;最后,应用TRIZ技术进化理论,确定目标组件的潜力进化路线,以及在各条潜力进化路线上的潜力状态或遗漏状态,从而快速产生创新设想,以指导待改进产品组态图的变换操作,发展出跟踪创新后产品可能的组态图,并落实为具体的概念设计方案,以及验证概念设计方案的可行性。
[1]Coleman C.Creative System Design Methodologies:the Case of Complex Technical Systems[J].Technovation,2005,25(8):831-840.
[2]陈旭玲,楼佩煌,唐敦兵,等.概念设计中功能驱动的消化吸收再创新研究[J].计算机集成制造系统,2009,15(10):1873-1879.
[3]柳岩,管晓方,宋玉泉.中国轿车自主创新的现状[J].吉林大学学报(工学版),2009,39(1):266-273.
[4]谢科范,董芹芹,陈云.基于资源集成的自主创新模式辨析[J].科学学研究,2007,25(增刊1):110-113.
[5]马炳和,王辉,苑伟政.基于结构组件库的 MEMS概念设计方法[J].中国机械工程,2010,21(1):46-50.
[6]李桂东,周来水,安鲁陵,等.基于八元集合模板和专用模块的产品快速设计方法研究[J].中国机械工程,2009,20(19):2348-2354.
[7]谭术洋,张根保,麦小锋.基于模板理论的计算机辅助创新平台研究与开发[J].机械设计与制造,2006(7):155-157.
[8]张建辉,檀润华,杨伯军,等.产品技术进化潜力预测研究[J].工程设计学报,2008,15(3):157-163.
[9]张换高,赵文燕,檀润华.基于专利分析的产品技术成熟度预测技术及其软件开发[J].中国机械工程,2006,17(8):823-827.
[10]Clarke D.Strategically Evolving the Future:Directed Evolution and Technological Systems Development[J].Technological Forecasting and Social Change,2000,64:133-153.
[11]白晶,秦现生,蒋明桔,等.一种组态式产品设计方法[J].西北工业大学学报,2010,28(4):553-558.
[12]徐荣华,唐敦兵,朱仁淼,等.基于功能本体的再创新设计策略研究[J].工程设计学报,2009,16(6):395-400.
[13]张冬梅,曾忠禄.结合专利分析与技术环境监测的技术预见模型[J].情报理论与实践,2010,33(4):61-63.
[14]胡旭洁,刘继红.集成TRIZ的计算机辅助公理化设计系统[J].计算机集成制造系统,2010,16(11):2321-2326.
[15]丁俊武,韩玉启,郑称德.基于TRIZ的产品需求获取研究[J].计算机集成制造系统,2006,12(5):648-653.
猜你喜欢
化工管理(2022年14期)2022-12-02
建材发展导向(2022年20期)2022-11-03
科学家(2022年3期)2022-04-11
建材发展导向(2021年11期)2021-07-28
建材发展导向(2021年7期)2021-07-16
河北农机(2020年10期)2020-12-14
学生天地(2020年8期)2020-08-25
流行色(2019年7期)2019-09-27
凿岩机械气动工具(2017年2期)2017-07-19
中国铸造装备与技术(2015年5期)2015-12-10