
航天大功率无刷电动舵机控制器研究
2012-07-20 04:00:22马瑞卿胡克石
微特电机 2012年2期
张 翔,马瑞卿,胡克石
(西北工业大学,陕西 西安710129)
0 引 言
目前,随着飞航导弹射程、速度、飞行高度和机动性的不断增加,电动舵机系统正向着输出力矩大、响应速度快、功率大、体积小、集成度高、全数字化方向发展。无刷直流电动机不仅保持了传统直流电动机良好的动、静态调速特性,且结构简单、运行可靠,已经在国防、航空航天等领域中得到了较好的应用[1-2]。
然而,从目前国内外的使用情况来看,虽然电动舵机越来越多地被应用在导弹上,并受到日益广泛的重视,但还存在不少问题和薄弱环节,尤其在大功率方面,电路参数变化对伺服回路的特性影响较大、伺服回路可测试性差、可靠性差、切换保护逻辑复杂对于大型弹道导弹目前的电动舵机一般很难满足这方面的要求[3]。
本文以大功率无刷直流电动舵机为对象,设计一种基于DSP+CPLD的数字化高精度、高可靠性的控制器。系统框图如图1所示,具有高精度控制、多功能保护等功能,并具有输入电压范围宽,输出电流大、体积小、易于控制、接口可靠、抗干扰能力强,方便MCU控制等特点,适合于高频响、大功率、高可靠性伺服系统。

图1 系统结构框图
1 航天大功率舵机的工作特点分析
航天飞行器的控制可以划分为两部分:一是实现特定的飞行弹道;二是必须对目标可能的航向改变作出反应。后者取决于对目标位置、速度或加速度信息的适时修正。由于现阶段航天飞行器一般以极高的速度飞行,所以在控制舵机对飞行路线进行修正上必须要有快速的响应和准确的定位;其次在飞行过程中,为了避免飞行器处于比较大的波动,一个稳定的控制回路至关重要,在此就要求舵机系统不但要有快速的响应,还必须要有较好的稳定性;再次大功率电动舵机在运行过程中,其电压、电流等参数变化复杂,要对各种出现的故障现象进行处理,保证系统的安全运行。本文将以快速、稳定、可靠这三个方面为主,对大功率舵机控制器进行分析、设计。
(1)利用DSP运算速度快,设计三闭环系统,配合模糊PID算法、并口数据传输达到高精度、响应速度快的特点;
(2)发挥CPLD强大的逻辑处理能力,简化DSP程序,使得主程序简化明了,通过合理的模拟、数字双滤波电路,使得信号传输稳定;
(3)分析了大功率无刷直流舵机工作时电压、电流、上下电、电气回路的参数情况,设计合理的电路和程序,保证其可靠性。
2 硬件电路设计
2.1 电源供电设计
本控制器输入有两种直流电源,分别为驱动电机的180 V(DC)功率电源和确保控制器正常工作的24 V(DC)控制电源。其中,180 V直流电源经过上下电开关电路、滤波电容排、三相全桥逆变器后为电机三相星形绕组提供方波驱动电流,使电机的主功率通道;而24 V直流电源为总的控制电源,分别通过电源模块转换为1路+5 V和1路±15 V的信号级电源、四路隔离的+15 V逆变器驱动电源。
首先分析上电过程中的逻辑时序,处于何种状态下的逻辑时序会造成功率部分的导通混乱,从而使控制器处于不稳定的状态。表1中可以看出,状态1、状态2,由于芯片供电和逻辑信号电都为0,不会造成功率器件的导通;当状态3、状态4、状态5时,由于5 V逻辑电平和DSP、CPLD上电时的不稳定状态,功率器件可能存在导通无序的状态,要控制好电源上下点时序,避免状态3、4、5的情况出现。
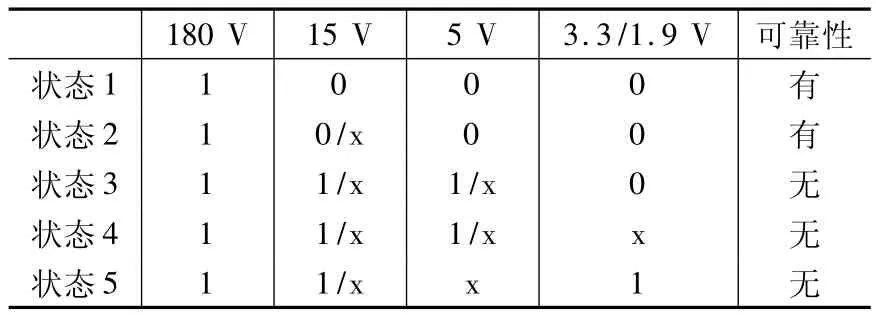
表1 电源供电状态表
本控制器在IPM前级,用MOSFET和三级管搭建了一个模拟电路,当3.3 V、1.9 V和5 V上电未稳定时,IPM前级管脚通通被上拉5 V,当3.3 V、1.9 V和5 V都满足稳定时,MOSFET关断,IPM的输出前级变为由CPLD控制的输出信号;当系统下电时,系统检测到3路信号电有变化时,马上关断光耦5 V前级供电,框图如图2所示。

图2 上下电管理框图
2.2 主控芯片设计
本系统采用DSP+CPLD的组合控制方式,DSP采用TMS320F2812的32位定点DSP,非常适用于工业控制、电机控制等。而CPLD采用epm1270,该芯片供电电压采用3.3 V,其集成度高、程序并行处理速度快且性能优良。两者结合优势明显,DSP作为控制单元,运算速度快、易于高速算法的实施;而CPLD作为逻辑、保护处理单元,其并行处理能力强,逻辑时序功能强大。
2.3 检测电路
2.3.1 电压检测
舵机驱动系统一般都存在电压泵升,通常,电源一般无法吸收该能量,大多数存储在滤波电容上,因此要对母线电压进行监控,当电压较高时,IPM制动功率管导通,能量通过制动电阻R释放掉。
根据主功率电路拓扑结构,电压检测点设计在电容排的两端,根据该电压值可知道母线电压的大小、电压泵升、电容排上有无电荷等,电压传感器选用LEM公司的LV25-P磁平衡式电压传感器,其输出为电流型隔离式,外配电阻进行输出电压匹配。
2.3.2 电流检测
本系统考虑到驱动电动舵机时电机始终处于频繁正/反转,大电流冲击频繁,对运行过程中的母线电流和三相电流都要进行同时检测;采用三个霍尼韦尔公司生产的CSNS 300M-002电流传感器,额定0~300 A,峰值电流600 A;一个检测母线电流、剩下两个检测两路相电流,通过2路相电流反算出第三路相电流,同样外配电阻进行输出电压匹配。
2.3.3 位置检测
控制器的位置检测采用旋转变压器和霍尔信号同时采样,将霍尔信号同时送入DSP和CPLD,而旋转变压器信号通过AD2S1200旋转变压器/数字转换器单片集成电路,输出12位绝对位置信息和带符号的11位速度信息。
2.3.4 温度检测
温度通过热敏电阻进行实时检测,通过电阻分压比,输出0~5 V电压。
2.3.5 硬件滤波电路
大功率电动舵机电磁环境复杂,航天系统对于可靠性要求又比较高,既要保证系统的可靠性,又不能频繁出现虚警现象,所以滤波采用硬件、软件双滤波设计。而硬件滤波又分为双通道,如图3所示,电压、电流、温度模拟信号经过二阶有源滤波后也分成两路,一路通过变比例后输出电压信号给AD采样,通过采样反馈信号给CPLD,另一路经过与过流基准比较,输出TTL电平信号给CPLD,进行逻辑综合处理,实现故障保护。
2.4 通讯电路
根据图1的系统结构图,在本控制器的组合中,DSP主要用来做速度、电流、位置三闭环的算法;而CPLD作为逻辑时序电路的主控单元,它承担逆变器管子的逻辑开通,电压、电流、位置信号的检测,以及各种故障信号和使能信号的检测;还有过AD2S1200旋转变压器/数字转换器单片集成电路。他们之间采用并口传送数据,电压、电流、温度等信号通过AD采样送入CPLD,旋转变压器位置信号通AD2S1200并口传送给CPLD,最后在CPLD中通过VHDL语言编写一个通讯协议,依次将三相电流、母线电流、母线电压、速度信号、旋转变压器位置信号等在短时间内通过并口连接将数据送入DSP。

图3 信号滤波电路
2.5 主功率及驱动电路
图4为逆变器主功率电路图。从图中看出180 V主功率电压(直流母线电压)首先经过一个功率电阻和大功率MOSFET并联的上电开关电路,其中功率电阻R1用于对后级滤波电容排上电电流进行限制,当电容排上的电压达到预定值时,功率MOSFET导通,功率电阻被短路,在驱动器运行过程中,电机电流一直从该MOSFET上流过。当电机刹车时,由CPLD控制斩波信号,这是母线电容电压泵升,母线电压超过260 V时,经过比较器产生过压信号,G7开通。如果过压信号消失,G7导通50 μs后关断。考虑到本舵机系统额定电流60 A,峰值电流220 A,逆变器采用采用7管组成的 IPM模块PM300RL A060,额定300 A,峰值600 A,为了吸收直流母线上的电压电流尖峰,在IPM的P、N两个引脚就近安装高频无感电容。
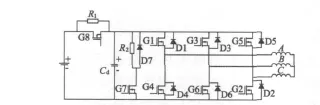
图4 逆变器主功率电路
驱动信号部分,CPLD发出PWM信号,将驱动信号送入ULN2003复合晶体管阵列,再将ULN2003后极驱动信号送入高速光耦HCPL4504,通过模拟上下电管理电路之后,驱动信号送入IPM模块。
3 软件设计及时序图
3.1 DSP 软件
DSP是控制闭环的核心部分,DSP的软件是控制系统的灵魂,对于控制系统的最终实现有着关键性的作用。本程序采用C语言编写,通过CCS3.3进行编译。
控制方式为三闭环系统。位置、速度为外环,电流环为内环,其中速度环采用模糊 PID的控制,CPLD将采来的电压、电流、位置、速度、温度信号通过并口协议传送给DSP作为参考根据,再和DSP中位置环和速度环的给定进行比较,经过速度环的模糊PID调节,产生输出,这个输出再作为电流环的输入,对CPLD传回的电流值和自身采集到的霍尔信号进行简单的空间矢量换算,然后将换算后的电流反馈进行PID调节,系统经过三闭环后,改变DSP输出PWM占空比,将新的PWM占空比信号发送给CPLD。
图5是DSP程序流程框图。DSP程序包括主程序和子程序。主程序包括初始化一些寄存器配置、I/O口配置、模块的配置和中断配置、变量的初始化等等以及读取CPLD中电机和控制器的信号;而子程序是对读取信号进行换算,并进行PID调节。
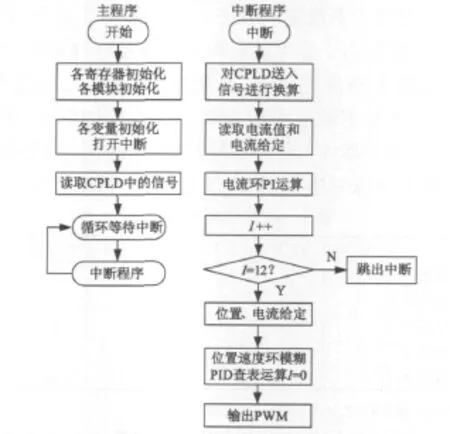
图5 DSP程序流程图
这里重点对速度环中模糊控制流程,以及参数匹配进行重点分析和设计。根据舵机控制系统的实际需要,采用二维模糊控制方法,根据转速误差e和转速变化率ec变化范围设定二维模糊规则表,并且通过 e、ec和二维模糊规则表查,对 KP、KI、KD进行修正:
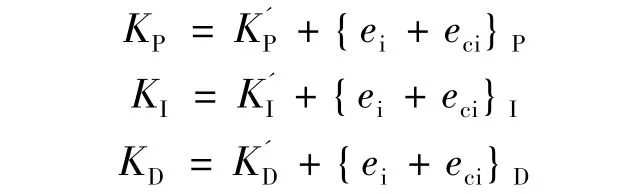
最后将修正的值送入转速环PID计算,通过转速环的PID计算,得出转速环的输出,最后将输出送入电流环,其具体控制流程如图6所示。
3.2 CPLD 软件
CPLD是逻辑和驱动部分的核心,实现逻辑合成、故障保护、斩波控制、信号接收处理、PWM量化和与外部通信等功能。
CPLD接收电流、电压、旋转变压器位置、温度等信号,并通过并口通讯协议,将其实时送入DSP中,并和Hall、PWM等模拟电平信号进行综合逻辑处理,具体流程如图7所示。
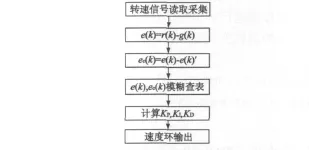
图6 模糊控制流程图
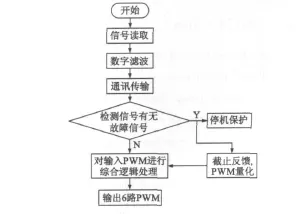
图7 CPLD流程图
虽然对于关键信号都进行了硬件滤波,但是考虑到控制器对于高稳定性的需要,为了增强控制器的鲁棒性,防止虚警现象的出现,对于故障信号还要在CPLD中进行数字滤波,如图8所示,对于长度小于1 μs的信号不予处理,超过20 μs的故障信号进行保护处理,当处理信号消失时延迟30 μs,取消保护信号。
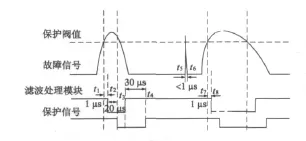
图8 CPLD保护信号滤波图
4 实验波形与结果
该航天用大功率无刷电动机额定电压180 V(DC),额定电流60 A,额定功率9 kW,额定转速7 000 r/min;对系统进行阶跃响应测试,由于位置信号由总系统给出,这里仅对速度和电流闭环进行测试。
图9为7 000 r/min时正反转阶跃信号波形。从图9中我们可以看出,给定一个从-7 100~7 100 r/min的阶跃信号,系统迅速跟随,响应时间在40 ms左右,超调500 r/min左右,超调量≤4%。图10为7 000 r/min正反转阶跃信号电流波形。通道1、2为相电流波形,通道3为给定阶跃信号,通道1、2为50 A/V。从图10可以看出,控制器保护功能良好,在正反转过程中对于电流可以有效地保护在200 A以下。实验证明采用该控制器对大功率无刷舵机可以进行良好的控制,响应速度快、精度高、正反转电流控制理想。
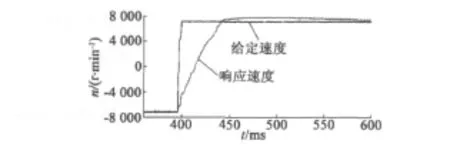
图9 7 000 r/min正反转阶跃信号给定、跟随波形
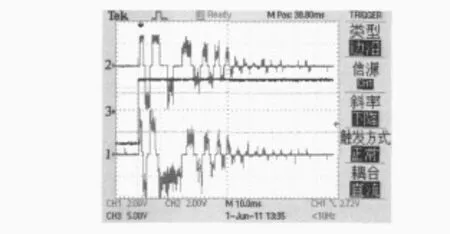
图10 7 000 r/min正反转阶跃信号电流波形
5 结 语
本文设计实现了一套航天用大功率无刷直流电动舵机的控制器,以DSP+CPLD作为核心控制器件,设计了集上下电管理、综合逻辑处理、模糊PID控制、信号采集处理于一体,其精度高、响应速度快、稳定性好、保护功能强大。该控制方法成功应用于某型号电力作动系统中,在多种情况下都能可靠、稳定的运行,减小了大功率舵机系统的体积,取得了较好的应用效果。
[1] 郑志伟.空空导弹系统概论[M].北京:兵器工业出版社,1997.
[2] 汪军林,解付强,刘玉浩.导弹电动舵机的研究现状及发展趋势[J].飞航导弹,2008(3):42-46.
[3] 符强.高精度导弹舵机控制器的研究[D].西安:西北工业大学,2004.
[4] Petrov M,Ganchev.Fuzzy PID control of nonlinear plants[C]//Proceeding of 2002 IEEE International conference on Intelligent Systems.2002(10):30-35.
猜你喜欢
电子制作(2019年16期)2019-09-27 09:34:46
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2018年1期)2018-04-04 01:48:14
北京航空航天大学学报(2017年3期)2017-11-23 05:14:28
制造业自动化(2017年2期)2017-03-20 14:26:08
火控雷达技术(2016年1期)2016-02-06 02:18:08
西部广播电视(2015年8期)2016-01-16 03:45:31
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
舰船科学技术(2015年8期)2015-02-27 15:38:46
