
并联有源滤波器的设计方法研究
2012-07-19 02:29涂福荣黄建涛章龙洪
山东电力高等专科学校学报 2012年2期
涂福荣 黄建涛 章龙洪
1.福建省电力勘测设计院 福建 福州 350003;2.福建省大田县水利局 福建 大田 366100
0 引言
电力电子设备是一种非线性用电设备,广泛应用于工业领域,如电解装置、电气机车、轧制机械、高频炉等。这些设备给电网带来了严重的谐波污染,电力滤波器的出现就是为了治理谐波污染。
电力滤波器的类型有:无源滤波器、有源滤波器、混合滤波器等。其中,有源电力滤波器(APF)最具发展潜力,它克服了无源滤波器易受电路参数影响、易与电网发生谐振现象等缺点,可以解决电力系统谐波、无功补偿、三相不平衡等多种问题。
有源电力滤波器的电路结构较为复杂,元器件参数不易确定,控制算法的可靠性检测困难。借助计算机仿真来设计有源滤波器,可以达到事半功倍的效果。
本文利用Matlab仿真软件,采用基于三相瞬时无功功率的指令电流产生方法、滞环电流跟踪控制方法,对控制系统做了仿真分析,检验控制算法的可靠性。
1 并联有源滤波器的工作原理
并联有源滤波器(APF)相当于一个谐波电流发生器,它由电流运算电路、补偿电流发生器两部分组成[1-2]。
其工作过程如下:首先,检测负载电流中的谐波电流;然后,通过适当的控制算法,使得滤波器产生补偿电流,这个补偿电流与负载谐波大小相等、方向相反。这样,就可以抵消电路的谐波电流,使电源侧的电流接近于正弦波。
并联有源滤波器 (APF)的工作原理如图1所示。
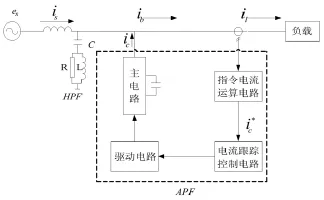
图1 并联有源滤波器的工作原理
其中:is为电源电流;ic为补偿电流;il为谐波电流;ib=il-ic。
并联有源滤波器(APF)控制电路是实现谐波治理的核心部分,它决定着滤波性能,它包括谐波检测电路、补偿电流计算电路两部分。
目前,常用的谐波检测方法主要有:瞬时空间矢量法;基于H的数字化分析法;自适应检测法等。
补偿电流的产生通常采用基于PWM的电压型逆变器,控制方法有:三解载波线性控制;滞环比较控制;无差拍控制等。
2 有源滤波器的控制系统
2.1 指令电流计算
指令电流运算的主要过程是,检测出负载电流中的谐波电流,并将与谐波大小相等、方向相反的电流作为滤波器的指令电流。
本文采用了基于瞬时无功功率理论的ip-iq谐波计算方法,其计算原理如图2所示。
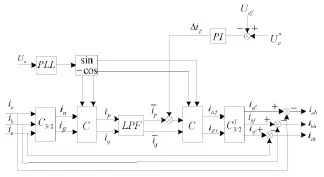
图2 ip-iq方法谐波计算原理
设ia、ib、ic为负载的三相电流,按照瞬时无功功率理论进行运算,可得瞬时有功电流分量ip和瞬时无功电流分量iq。
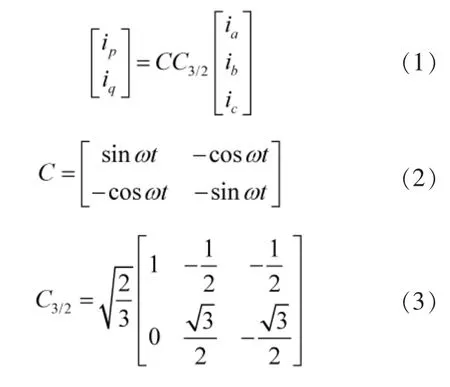
ip、iq经过低通滤波之后,可得基波电流的有功分量、无功分量再经反变换后,即得三相基波电流的瞬时值:

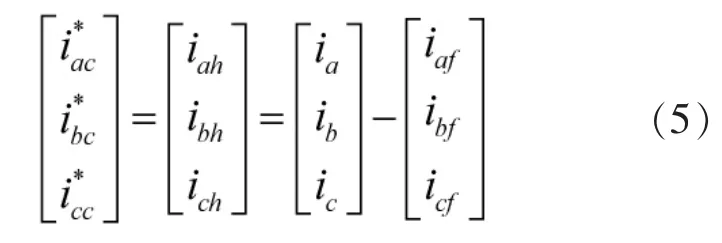
最后,用负载电流值减去基波电流值,即得三相谐波电流,即三相指令电流:
sinωt、-cosωt是通过PLL锁相环和正余弦发生电路得到的,它与电源的电压同相。
若设定iq=0,则ip、iq经反变换之后,可得到负载电流基波有功分量的瞬时值,可以实现对无功电流的补偿。
基于瞬时无功功率理论的ip-iq法计算量小、实时性好[3],还可以根据不同的需求进行选择性补偿。
2.2 直流侧电压的稳定
主电路直流侧电容电压的稳定也很重要,在APF的工作过程中,电容电压的稳定,可以确保PWM电流控制的准确性。
直流侧电压的稳定控制方法有两种:
1)通过增加单独的整流电路为直流侧电容供电,此种方法增加了电路的复杂性,较少采用。
2)是直流侧电容从电源直接获取能量,通过施加适当的控制策略,将电容电压维持在适当的范围内,其原理如图2所示。
图中,U*c为电容电压的给定值,Ucf为电容电压的实际值。Ucf作为控制系统的反馈值,U*c与Ucf的差值经过PI控制器,得到调节信号Δip,Δip叠加到基波有功分量之中。
当Δip>0时,从电网流出的有功电流经升压斩波电路对电容进行充电;当Δip<0时,则将电容电压进行逆变,将有功电流回馈电网。这就是实现直流侧电容电压的稳定原理。
2.3 滞环电流跟踪控制
滞环电流跟踪控制的作用是,通过施加适当的控制方案,产生电力电子器件的开关逻辑信号,使得实际补偿电流icf能够实时跟踪指令电流信号i*c。
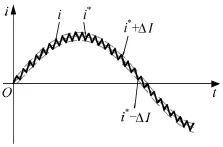
图3 滞环电流跟踪控制原理
PWM变换器的滞环比较方法如图3所示。其中,i*为参考输入电流指令,i为输出负载电流反馈,e=i*-i为电流跟踪误差,2ΔI为对称滞环比较器的滞环宽度。
当e>ΔI时,输出PWM=1,变换器输出电压u0=ud,输出电流i上升;当e<ΔI时,输出PWM=0,变换器输出电压u0=ud,输出电流i下降。依次反复,便实现了对输出电流i的跟踪控制,使其跟随指令电流i*。
滞环电流比较方式的优点是,便于采用硬件来实现,实时较好,精度高且电流响应速度快,稳定性好[4]。缺点是开关频率波动较大,甚至超过开关器件的频率容限,使其损坏。需要改进相关的软硬件技术来稳定开关频率,保护开关器件。
3 滤波器的仿真设计
3.1 仿真模型
本文利用Matlab的电力系统工具箱,建立了并联有源滤波器的仿真模型,如图4所示。谐波源采用三相Diodes整流器带电阻负载,其中,电阻与晶闸管并联,电阻是可变的,主电路三相变流器的功率器件采用IGBT/Diodes。
滤波器的仿真参数:
电压源为标准的三相正弦波,线电压380V,频率50Hz; 负载电阻R1=10Ω,R2=10Ω,R3=30Ω, 0~0.5s晶闸管关断,等效电阻为50Ω,0.5s晶闸管导通,等效电阻为30Ω;L1=5mH,L2=10mH。
直流侧电容C=4700μF,给定电容电压初始值为700V,电压指令为700V。
滞环宽度为0.2A,指令电流滤波采用Butterworth Filter,截止频率为20Hz;直流电压环PI参数,Kp=2,Ki=20。
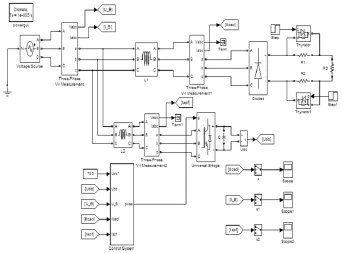
图4 有源滤波器的仿真模型
3.2 仿真结果分析
1)负载电阻不变时的波形
在t=0~0.5s,晶闸管关断,负载电阻始终为50Ω,仿真波形如下:
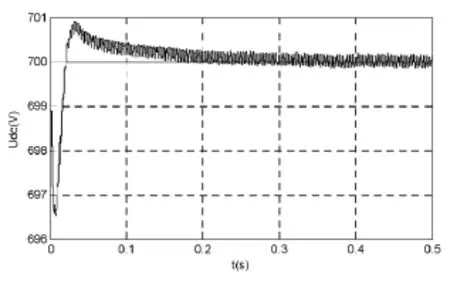
图5 直流侧电容电压Udc
图5中,蓝线为电压指令值,红线为实际电压值。t=0s,电容电压初始值为700V,仿真开始后电压波动并跟踪指令值;t=0.2s,电容电压基本稳定在700V左右,验证了控制算法的正确性。
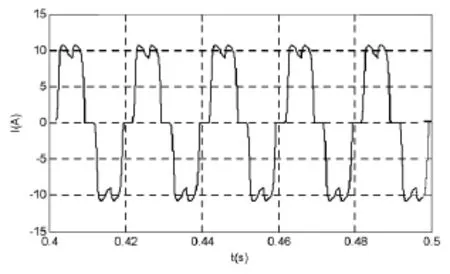
图6 谐波源电流
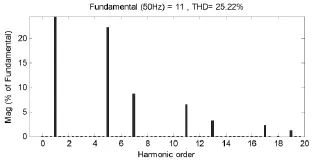
图7 谐波源电流的频谱图
图6为谐波电流波形,可以看出,其谐波畸变率(THD)高达25.22%,FFT分析显示,谐波电流中含有多种谐波,尤其5次、7次谐波的幅值非常大,分别达到了基波幅值的22%和9%。
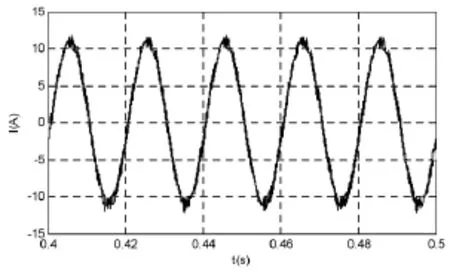
图8 电源电流
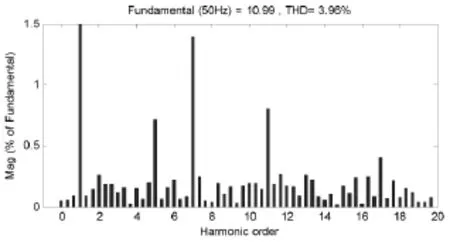
图9 电源电流频谱图
图8为电源电流的波形,可见,经APF补偿后,电源电流的正弦度非常好。
图9的频谱图表明,电源电流的各次谐波含量均显著减少,5次和7次谐波的不到基波幅值的1.5%,谐波畸变率也下降至3.96%。可见,由非线性负载所带来的谐波电流被有效地抑制了。
由图10可见,滤波器的实际补偿电流能够很好地跟踪指令电流。
2)负载电阻突变时的波形
在t=0.5s,晶闸管导通,负载电阻从50Ω突变至30Ω,仿真波形如下:
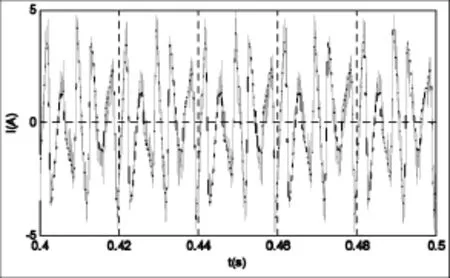
图10 补偿电流跟踪指令电流
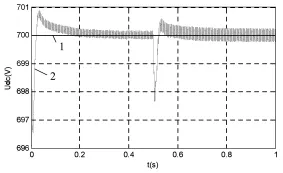
图11 电阻突变时的直流侧电压Udc
图11中,线1为电压指令值,线2为实际电压值。t=0.5s,负载电阻突变,电容电压也跟着突变,t=0.6s,Udc基本稳定在700V左右。
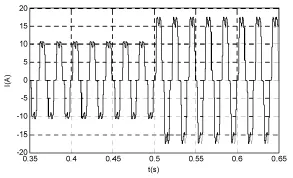
图12 电阻突变时的谐波源电流
图12为负载电阻突变时的谐波电流波形,可见,t=0.5s,电阻突变后,谐波源电流从11A增大到15A左右。
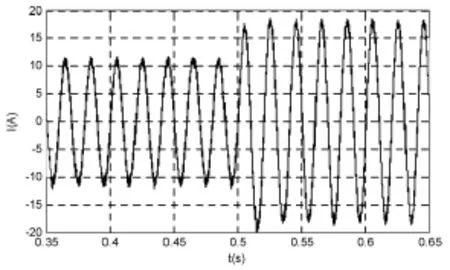
图13 电阻突变时的电源电流
图13为负载电阻突变时的电源电流波形,可见,t=0.5s,电阻突变后,电源电流从11A增大到15A左右,始终保持很好的正弦度。
这说明,在电阻突变的情况下,本文设计的滤波器仍能很好地完成谐波治理。
4 结论
本文利用Matlab的电力系统工具箱,采用的是基于瞬时无功功率理论的ip-iq谐波算法、滞环电流跟踪控制方法,设计了并联有源滤波器。
仿真结果表明,本文的元器件选型、控制方案较为合理,控制效果良好,计算机仿真为滤波器设计提供了一条便捷有效的途径。
[1] 王金星,王庆平,贾长朱,杨刚,陈超英.MATLAB在有源滤波器仿真设计中的应用 [J].电力系统及其自动化学报,2001,13(4):43-46.
[2] 陈国柱,吕证宇,钱照明.有源滤波器的一般原理及应用[J].中国电机工程学报,2000,20(9):17-21.
[3] Zhou Luowei,Du Xiong,Hou Shiying.A comprehensive analysis of one cycle controlled single-phase DC side active power filter[C].IEEE International Conference on Industrial Technology,Hong Kong,China,2005.
[4] 谈龙成,陈永刚,常国洁等.有源电力滤波器的电流控制新方法[J].电网技术,2006,30(21):62-65.
猜你喜欢
延安大学学报(自然科学版)(2021年3期)2021-10-13
测控技术(2018年5期)2018-12-09
通信电源技术(2018年3期)2018-06-26
大连理工大学学报(2017年6期)2017-11-22
中学物理·高中(2016年12期)2017-04-22
电信科学(2016年10期)2016-11-23
火控雷达技术(2016年3期)2016-02-06
广西文学(2015年9期)2015-10-24
科技传播(2015年20期)2015-03-25
西安航空学院学报(2014年5期)2014-07-13
