
基于地磁技术的车辆检测传感器
2012-07-18 07:40:48杨志恺杨成忠李佳骏
杭州电子科技大学学报(自然科学版) 2012年5期
杨志恺,杨成忠,张 君,李佳骏
(杭州电子科技大学自动化学院,浙江杭州310018)
式中,L为两传感器间的距离。N为两阀值间的时间序列点数。f采样频率表示传感器的采样频率。
0 引言
智能交通系统最基础并且最重要的环节就是车辆检测传感器[1]。国内外,车辆检测传感器的种类大致相同,多数采用环形线圈作为检测原件。此类传感器受工作方式影响,线圈容易损坏,且安装成本较高[2]。地磁检测技术早在70年代初期就开始应用于车辆检测。但由于当时磁场传感器的检测精度不高,此方法始终没有得到长足发展[3]。如今,随着高精度磁场传感器的诞生,地磁检测技术将足以完成车辆检测的工作。本文选用TMR磁场传感器,设计了一种安装简便,精度较高的车辆检测传感器。
1 地磁车辆检测原理
地球表面存在着大小约为0.6Gs,且在一定范围内相当稳定的磁场[4]。汽车作为一种大型的铁磁物体,可以看作一个双极性磁铁的模型。车辆周围的磁感应强度因为车辆自身磁场与地磁场相互作用而产生有规律变化。简单来说,车辆周围的混合磁场可以建立成一个磁偶极子的模型[5]。如图1所示,将车辆看作两个相距L远的点电荷-qm、+qm。其中,L=2d。磁场传感器位于坐标轴原点。为了简化分析,假设车辆在运动时,点电荷模型的相对位置保持不变。此时,磁偶极子在原点处的磁场强度:

将式2、3代入式1中得:

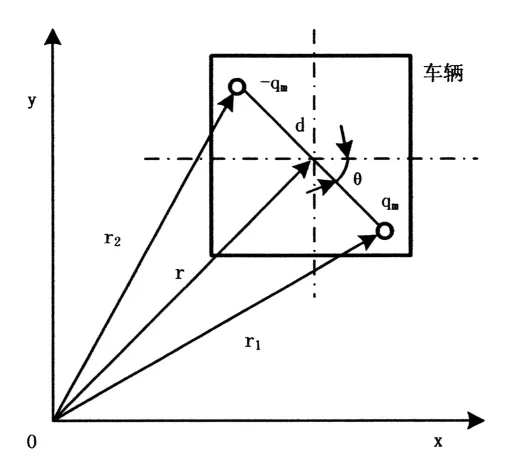
图1 车辆周围磁场的磁偶极子模型
由式4、5可知,磁偶极子在原点处的磁场强度会随着其所在位置不同而有规律变化。且不同的磁偶极子,因为qm的大小不同,在原点处的磁场大小也会不同。根据此原理,可通过检测车辆行驶时的磁感应强度来获取交通流信息。
2 车辆检测传感器硬件设计
如图2所示:当车辆进入检测范围内,3轴TMR磁阻传感器会将3个分量的地磁场信号转化成电压输出,电压经运放放大后输入AD转换器。最终,地磁场信号以数字量的形式输入单片机。单片机首先对数据进行校正,滤波等预处理。最后,根据预设算法,对输入的AD码进行分析,获得一系列道路车辆信息。二总线接口电路负责信号以及电力的传输。
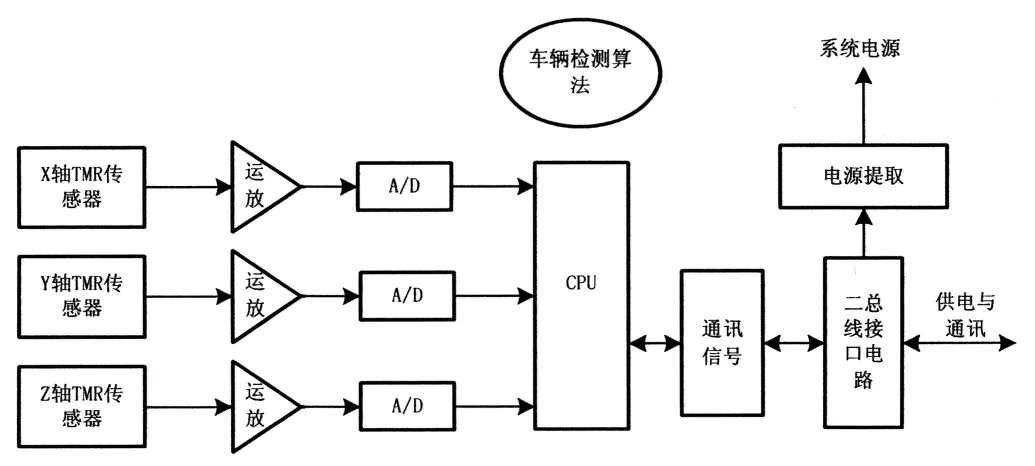
图2 传感器结构框图
3 基于磁感应强度车辆检测算法的实现
由于地磁信号微弱且易受干扰,故采用滑动滤波对数据进行平滑处理:

式中,xn表示原始信号的抽样序列,f(n)是处理后的信号序列。M是窗口长度,取值随外界条件而定。
为了去除每台传感器间因灵敏度不同造成的系统误差,必须对3轴数据进行归一化处理:

式中,xn表示原始数据,S(n)表示归一化后的数据。
车辆有无判断:由第二节检测原理可知,车辆经过传感器时会在正反向产生一个绝对值相同的极值。因此,可通过设定阀值α确定车辆是否通过:

式中,s(n)为经过处理后的时间序列。α为阀值。y(n)=1时表示有车,为0时表示无车。
行驶方向判断:假设1号,2号传感器平行于道路方向,由南向北摆放。若1号先于2号到达阀值,则说明车辆是由南向北行驶。反之,车辆由北向南行驶。
车辆速度计算:将两传感器竖直摆放,使敏感轴方向相同。车辆先后通过两台传感器。由于采样频率是确定的,只需确定两传感器到达阀值之间的时间序列的点数便可确定车速:

式中,L为两传感器间的距离。N为两阀值间的时间序列点数。f采样频率表示传感器的采样频率。
4 实验结果分析
将两台传感器保持相同敏感轴方向,平行于道路,由南向北摆放。1号在前,2号在后,两者相距50cm。X敏感轴由南向北,平行于车辆行驶方向。Y敏感轴由东向西,垂直于车辆行驶方向。Z敏感轴垂直于水平地面,指向空中。假设车辆以最高速120km/h通过传感器,车身长度为5m,为保证扰动曲线能被完整记录,必须确保在0.15s的通过时间内,地磁信号被采样10次。因此确定采样频率为100Hz。
驾驶车辆以20km/h的速度由南向北从两台传感器的正上方驶过。采样数据存储于计算机,经整理后导入Matlab软件进行仿真。根据式6、7并选取M=10,对数据进行处理后得到1号传感器和2号传感器的磁感应强度波形如图3,4所示:
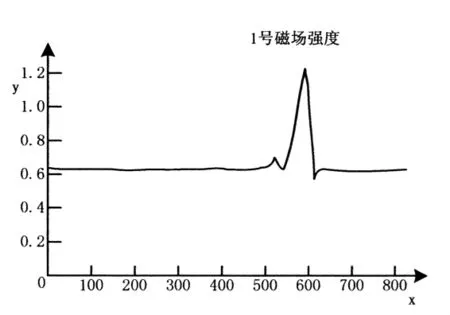
图3 1号传感器磁场强度曲线
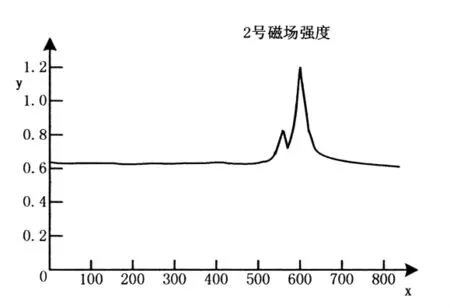
图4 2号传感器磁场强度曲线
试验中,暂取阀值α=1.1。根据式8,当s(n)≥α时,y(n)=1。此时,输出有车信号。

由于1号传感器先于2号到达阀值,因此可判断车辆行驶方向为由南向北。
5 结束语
本文所设计的基于地磁技术的车辆检测传感器可以准确记录下车辆行驶过程中对地磁的扰动,并根据相应算法获得车辆的存在,速度,行驶方向等一系列交通道路信息。经实验证明,本设计具有一定的检测精度。但在实际应用中,因车辆检测阀值α的确定是影响车检精度的关键,而此阀值需根据不同环境进行相应调整,故后续有待建立一套更为完整的算法来对α进行定量的研究,使其做到自适应调整。
[1] Lee Tsu-Tian.Research on Intelligent Transportation Systems in Taiwan[C].Kunming:Proceedings Of the 27th Chinese Control Conference,2008:18 -19.
[2] 史元超.基于信息传感器的交通状态获取技术的研究[D].北京:北京交通大学,2009:3-6.
[3] MiltonMills.Magnetic Gradient Vehicle Detector[C].Cleveland:Proceedings Of the 24thIEEE Vehicular Technology Conference,1974:91 -95.
[4] 徐文耀.地磁学[M].北京:地震出版社,2003:15-21.
[5] Kwan B W,Tung L J.Magnetoresistors For Vehicle Detection And Identification[C].Florida:Department of Electrical Engineering.FAMU -FSU College of Engineering,1997:3 839-3 840.
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:11:54
娃娃乐园·综合智能(2021年12期)2022-01-18 05:46:42
传感器世界(2019年6期)2019-09-17 08:03:20
西部交通科技(2018年2期)2018-06-14 13:22:40
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
北京航空航天大学学报(2017年5期)2017-11-23 05:53:59
自动化学报(2017年5期)2017-05-14 06:20:53
中学生数理化·高二版(2016年12期)2017-02-28 10:08:42
Coco薇(2016年1期)2016-01-11 16:53:24
中国惯性技术学报(2015年1期)2015-12-19 13:12:09
