机载激光雷达技术的数据处理与4D产品制作①
2012-07-18 03:50:36李淑琴
全球定位系统 2012年2期
李淑琴
(河南省遥感测绘院,河南 郑州450003)
0 引 言
地理信息系统和遥感技术发展到今天,对数据质量、数据获取的效率和手段提出了更高的要求。数字立体摄影测量工作站虽然早已普及并且成熟,但是从工作流程和工作模式来看,生产周期太长,已经不适应当前信息社会的快速发展的需要,也不能满足“数字城市”对测绘的要求。近年来,随着科学技术的发展,一种新型的遥感方式——机载激光雷达(LiDAR)逐渐崭露头角,它是一种通过位置、距离、角度等观测数据直接获取对象表面点的三维坐标,实现地表信息提取和三维场景重建的对地观测技术,是集激光扫描仪、全球定位系统(GPS)、惯性导航系统(INS)三种技术于一体的主动式空间测量系统[1],其中LiDAR获取的数据经过地面的信息处理而生成逐个地面采样点的三维坐标,经过综合处理而得到沿一定条带的地面区域三维定位与成像结果,如高密度点云数据、高分辨率DOM、DEM、DSM、DLG等。具有空间与时间分辨率高、动态探测范围大、不依赖太阳光照所以能够全天候工作、能够部分穿透植被遮挡、直接获取真实地表高精度三维信息等特点,被广泛应用于地面数据探测和模型恢复、重建等方面,逐渐成为高精度地表三维模型获取的重要手段,由于LiDAR系统对环境的灵敏度较低,同时高能激光源能够在海岸水域测量水下地形,在地形测绘、三维城市建模、环境监测等领域也都具有广阔的发展前景和应用需求,所以,LiDAR系统逐渐成为最先进的遥感系统之一,它将为测绘行业和地理信息系统的发展带来一场新的技术革命。
LiDAR系统属于先进的主动传感系统,它是利用激光作为传感载体,它获取的数据包括GPS轨迹数据、INS飞机姿态数据、激光测距数据和激光扫描镜摆动角度等,通过对这些数据的联合处理,可以获取测点的三维坐标点云数据。由于激光扫描技术的不断进步,激光扫描设备的精度和扫描频率越来越高,点云数据的体积极大,因此,海量点云数据的快速处理是LiDAR应用的关键,而点云的滤波和分类是其中的关键技术。对于自动分类没有滤掉的部分粗差和激光点需要人工交互编辑,最后进行内插等运算生成高精度的DSM和DEM.
机载激光雷达在地表三维信息获取方面的巨大优势使其在测绘领域的应用有着广阔的前景。LiDAR技术在我国的应用和研究刚刚起步,其中利用LiDAR进行困难地区DEM、DOM、DLG数据的生产是当今研究的热点之一。研究LiDAR点云的滤波和分类等关键技术,并不断拓展Li-DAR的应用领域,为数字城市建设、交通设计、电力勘测设计、灾害调查与环境监测等方面应用提供服务[2]。
点云数据处理就是对航空摄影所获取的激光点云数据进行滤波、分类、编辑等处理,以获得满足4D(DSM、DEM、DOM、DLG)制作要求的参数和数据。
1 点云数据处理
1.1 点云数据滤波、分类与编辑
由于LIDAR激光系统扫描获取的点云数据在形式上比较分散,光斑密度不同,空间分布不规则,无法适应大比例尺制图和城市精细的三维建模需要,这就需要我们进行数据分块、自动滤波和分类、手动精细滤波分类,才能输出满足要求的DEM数据。
机载LIDAR点云数据滤波处理的作业流程如下:
点云数据→数据分块(TSCAN)→自动滤波、分类(TMODEL)→手动滤波、分类(TMODEL)→输出DEM、分类结果(TSCAN).
1.2 自动滤波
在TSCAN和TMODEL模块中首先对Li-DAR原始数据点建立网格分块索引,并利用编写的宏命令逐块进行滤波分类,以区分出地面点、水域、建筑物、植被等不同类别。
反复调整宏命令中的参数以获取较好的分类精度,以便减少手动滤波分类的工作量。
1.3 手动分类
1)分类的原则
①地貌、土质以及与地面相连而成的道路、河流、乱掘地、高台等地物应表示;②建筑物、高塔等人工地物(如立交桥)、植被、临时地物(如临时土堆等静地物,车辆、行人、飞鸟等动地物)、架空的管道、电线、以及电线塔、广告牌等地物粗差点应滤除;③地物尺寸小于产品要求格网间距的以及地物相对高差小于相应比例尺DEM中误差的都可做忽略处理;④对于制作DEM需要滤除的地物(如建筑物等)应放到相应的类别。
2)分类要求
对自动分类的成果参照获取的影像数据进行手动精细分类滤波,以获得高精度的数字高程模型。结合项目要求,将LIDAR点云数据分为Ground、Water、Noise、Default、Temp五类。粗分如下:
①将噪音点(由激光脉冲被吸收或反射形成的如水,云或烟雾等在近红外波段会吸收激光脉冲,而玻璃、金属等会反射脉冲等因素造成不规则的返回值)、水面上的船只、较高的汽车和其他无法判断的零散激光点归入Noise;②将河流、湖泊、水库等水面上的点归入Water;如果是干涸或部分干涸的河流、湖泊等,其裸露部分要归入Ground;③桥面的点归入bridge;但高架的公路、立交桥架空部分且底部有较宽涵洞穿过的公路、桥梁等,所有架空部分都要归入Default;④地面上的一些特殊地物,形状一般比较规则,人工搭建用作舞台、讲台等,归入Default;⑤其他如建筑物墙角或墙面点、围墙上的点煤堆草堆上的点等均为Ground;⑥将房屋表面的点、树木上的激光点要归入Default;⑦工厂内输气管道以及机器设备,以及电力线、通信线、管道和垣栅等点云数据归入Default.
1.4 水域置平处理步骤与方法
在点云分类前应先进行水域置平处理,步骤如下[3]:
1)在Microstation中定值(常水位高程值)画水域边界范围线,统一归层;
2)将水域边界线内的所有Ground类点云归到Water类中;
3)将逐个水域所有范围线画完后,参考范围线内的已有Water层点云,统一修改指定线高度,保证闭合多边形高度同高并符合实际情况;
4)关闭所有点云层,选中全部所画水域范围线,在 Terramodel中进行 Triangulate Survey(Create Surfaces工具栏),然后使用Insert Breakline Element工具参考闭合多边形内插特征点;
5)将生成的水域边界点导出生成xyz文本格式文件,在Terrascan中读入,将该文件和原始点云文件一起保存,并将所有线上特征点分到Temp类。
2 4D产品制作
2.1 DEM制作及地貌要素提取
1)DEM制作
对经过自动滤波、手动精细分类后的点云数据进行输出。先打开结合表图层,选择需要输出的图框及图幅号,导出DEM(选择Ground和Temp类),设置DEM的格式、各内插参数、格网间距及坐标系统,生成最终DEM数据。
点云数据的处理一般在WGS-84坐标系下进行,因此,输出DEM时应根据测区解算的转换参数对DEM成果进行坐标转换。
2)地貌要素提取与编辑
利用DEM数据在Terrascan中生成等高线,并按不同比例尺要求提取高程注记点及坎上坎下的对点。
等高线生成时可对DEM进行抽稀,并对初步等高线进行圆滑编辑,处理好等高线与不同地物之间的相对关系,以便满足用图需要。
原始点云数据如图1,2所示,生成的DEM如图3所示。

2.2 DOM 制作
建立LPS工程,依靠相机检校后的外方位元素和原始TIFF影像,由自动滤波后生成的DEM,对航摄像片进行逐片数字微分纠正生成单片数字正射影像,此正射影像用于辅助点云分类使用的粗略的正射影像,然后检查正射影像是否清晰,房屋是否变形,桥梁是否扭曲等,对满足要求的单片数字正射影像直接拼接。如发现桥梁扭曲,需要重新对点云作如下处理:将桥上的点云数据归入Ground类,将变形区域的点云数据定值,使桥梁置平,对多层立交桥逐层定值,对有高低变化较大的桥梁逐段定值,再和地面点一起构TIN生成DEM数据,进行数字微分纠正,尽可能使纠正过的正射影像达到最佳的视觉效果。
对上述符合要求的单片正射影像再进行镶嵌、调色、裁切后最终生成一幅完整的正射影像图,如图4所示。
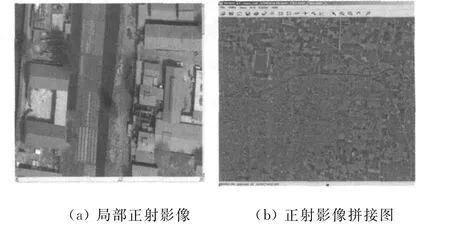
图4 数字正射影像
2.3 DSM 制作
通过自动滤波和手工精细分类获得的点云数据直接构TIN生成满足规则格网要求的数字地面模型(DSM),如图5所示。
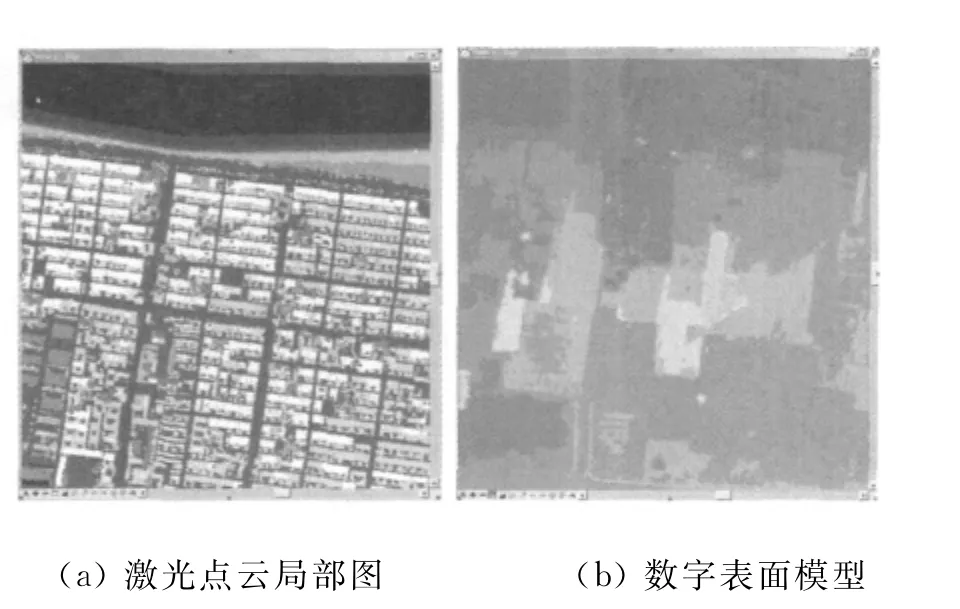
图5 DSM数据
2.4 DLG制作
有了DSM和DOM,制作数字线划图DLG就容易多了,其流程如图6所示。
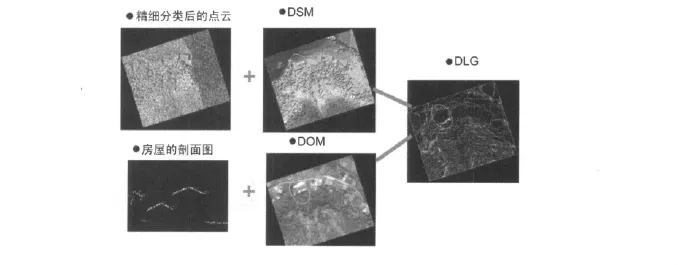
图6 数字线划图DLG制作
3 机载激光雷达在建立真三维场景中的运用
传统的三维建模方式(依据数字线划图DLG建立模型,用外业实地拍摄或航空摄影的数码照片进行贴图处理)从理论上讲是伪三维,对还原真实场景还有一段差距,从摄影测量方面还存在着自动化程度不高,在沙漠、沿海滩途以及茂密森林地区,影像纹理和对比度减弱,势必会影响影像的匹配结果,从真实意义上讲,只能做到相似,而无法做到真三维再现。机载激光雷达技术的出现或许能解决三维场景还原的真假问题,能弥补摄影测量技术在上述技术领域和区域的缺陷和不足。因为激光点云是反应真实场景的大地坐标分布,已经有很多机构在研究和探索用机载激光雷达和倾斜相机还原真实场景的课题,相信不久的将来,能大大减轻制作4D的作业周期,真实再现现实生活场景。
4 结 论
通过对获取的三维激光点云数据进行除噪声和滤波处理,可以直接得到数字高程模型DEM及数字地面模型DSM,相对于摄影测量技术获取DEM、DSM来说,LIDAR比较高效、快捷地采集DSM、DEM,周期短,而且人工干预的工作量小。在不需要采集影像的情况下,LIDAR可以全天候采集;LIDAR对于植被有一定的穿透能力,对于地形比较复杂的地区,LIDAR采集具有明显优势;LIDAR采集所需外业控制点很少,特别适合外业困难的地区航测;LIDAR在DSM、DEM数据生成方面,自动化程度比传统方法提高数倍,特别适合大规模地形测量作业。但是机载激光雷达在数据处理的算法上还不太成熟,在测区植被较厚的地方,存在误差比较大,因此,LIDAR在构建DEM的过程还有待进一步的探索和优化。此外,用机载激光雷达和倾斜相机还原真实三维场景势必巩固LIDAR的重要性。
[1]仇肇悦,李 军,郭宏俊.遥感应用技术[M].武汉:武汉测绘科技大学出版社,1995.
[2]徐冠华,李德仁,刘先琳.遥感在中国[M].北京:测绘出版社,1996.
[3]楚长春,麻风海.三维激光扫描仪点云数据在 MicroStation下的处理研究[J].测绘与空间地理信息,2007(10):114-116.
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
华东师范大学学报(自然科学版)(2018年3期)2018-05-14 10:27:18
遥感信息(2015年3期)2015-12-13 07:26:50
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
电测与仪表(2015年22期)2015-04-09 11:42:14
电子设计工程(2014年20期)2014-02-27 12:01:00