柔性身管的RBF神经网络PID控制
2012-07-11 09:42田福庆李克玉李进卫
舰船科学技术 2012年4期
田福庆,李克玉,李进卫
(1.海军工程大学 兵器工程系,湖北 武汉 430033;2.中国船舶重工集团公司第七一三研究所,河南 郑州 450015)
柔性身管的RBF神经网络PID控制
田福庆1,李克玉1,李进卫2
(1.海军工程大学 兵器工程系,湖北 武汉 430033;2.中国船舶重工集团公司第七一三研究所,河南 郑州 450015)
由于舰炮身管的弯曲振动,传统的利用炮管轴角位移进行反馈控制的方法无法精确控制炮口指向。针对这一缺点,提出了一种利用炮口角位移作为随动系统位置环反馈信息的控制结构。为模拟身管的振动,应用多刚体动力学对舰炮身管进行了柔性体建模。为改进后的控制结构设计了基于RBF神经网络整定PID参数的控制器,并与传统PID控制器的控制效果进行了仿真对比,验证其对于提高随动系统控制精度的有效性。
柔性身管;随动系统;RBF神经网络;SimMechancis
0 引言
现代小口径舰炮身管具有较大的长径比,因自重而产生一定的静弯曲[1],并且在发射时,一般处于高速跟踪状态,转动惯量及负载力矩变化大等非线性因素,常使身管产生弯曲振动。通过对炮口振动与弹着点坐标的相关性分析,发现炮弹出口时的炮口位移与弹着点坐标存在着较好的相关性,振动直接影响散布[2]。无论舰炮系统的振动有多复杂,其作用最终在炮口有所反映。因此,对炮口振动的研究和对炮口指向的控制就显得较为重要。
文献[3]系统阐述了双电机驱动的火炮随动系统的组成,建立了该系统的模型,但没有考虑身管振动对控制精度的影响。文献[4]为舰炮设计了以身管角位移作为随动系统的反馈量的火炮随动系统,试图直接对身管指向进行控制,但没有考虑身管振动对随动系统中的机电耦合产生的影响。另外在国外,也有将可编程脉冲信号发生器所产生的阻尼信号传递给火炮随动系统,以抵消火炮振动,减小火炮射弹散布的报道[5],即通过对随动系统进行反馈控制,用随动系统来补偿炮口的振动。从结果上看,有一定的效果。
针对身管振动对射击精度影响较大及其非线性的特点,本文提出一种利用炮口角位移作为随动系统位置环反馈信息的控制结构,仿真验证其提高控制精度的有效性。
1 模型建立
舰炮的随动系统中联系了诸多的传动装置和变速装置,同时炮耳轴和身管也影响着舰炮随动系统的控制性能。舰炮机构简图如图1所示。
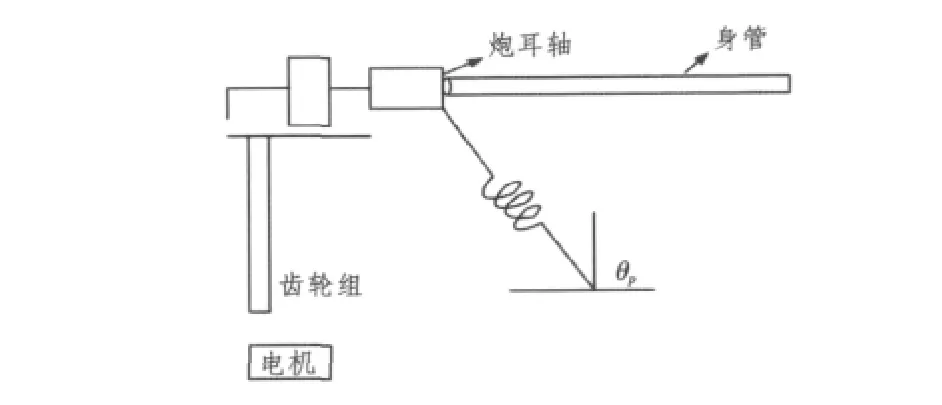
图1 舰炮随动系统机构简图Fig.1 Structure diagram of servo system
1.1 建模理论
由于舰炮身管的弯曲振动控制要用计算机控制系统来实现,因此应尽量使所建立的运动方程简单和易于离散化,故选择以多体系统建立动力学方程的方法。
这里以某舰炮为例,其身管的构型,包括各段长度li,横截面积Ai,对质心的转动惯量Ii,材料的弹性模量E,以及密度ρ等几何物理特性均可以得到。将舰炮身管依照截面尺寸划分为5个单元体,各单元体间的连接简化为弯曲弹簧、弯曲阻尼和光滑铰链(消除沿身管方向的位移),其力学模型如图2所示。
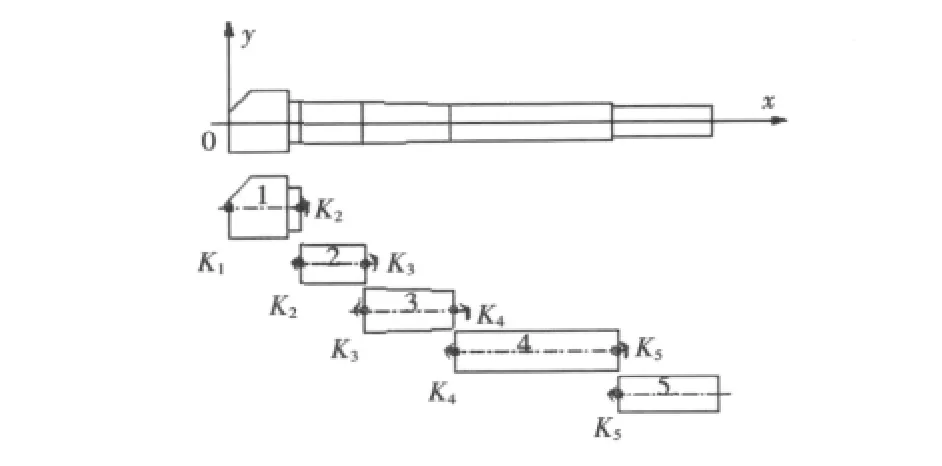
图2 炮管多体系统力学模型Fig.2 Dynamic model of multi-body system of gun tube
若将炮管视为弹性体,考虑炮管的弯曲振动对炮口位移的影响,则火炮是一个无限自由度系统。从振动理论可知,系统的振动响应特性主要是由其低阶模态决定的,因此可以用炮管的低阶模型来近似,其数学模型的简化形式为:

式中:M,C和K分别为火炮的广义质量、阻尼和刚度矩阵;Mu,Mf和MF分别为控制力矩和炮管摇摆作用下的自身惯性力矩和射击载荷引起的作用力矩。
对火炮身管建立可变形体动力学方程,设各单元转角

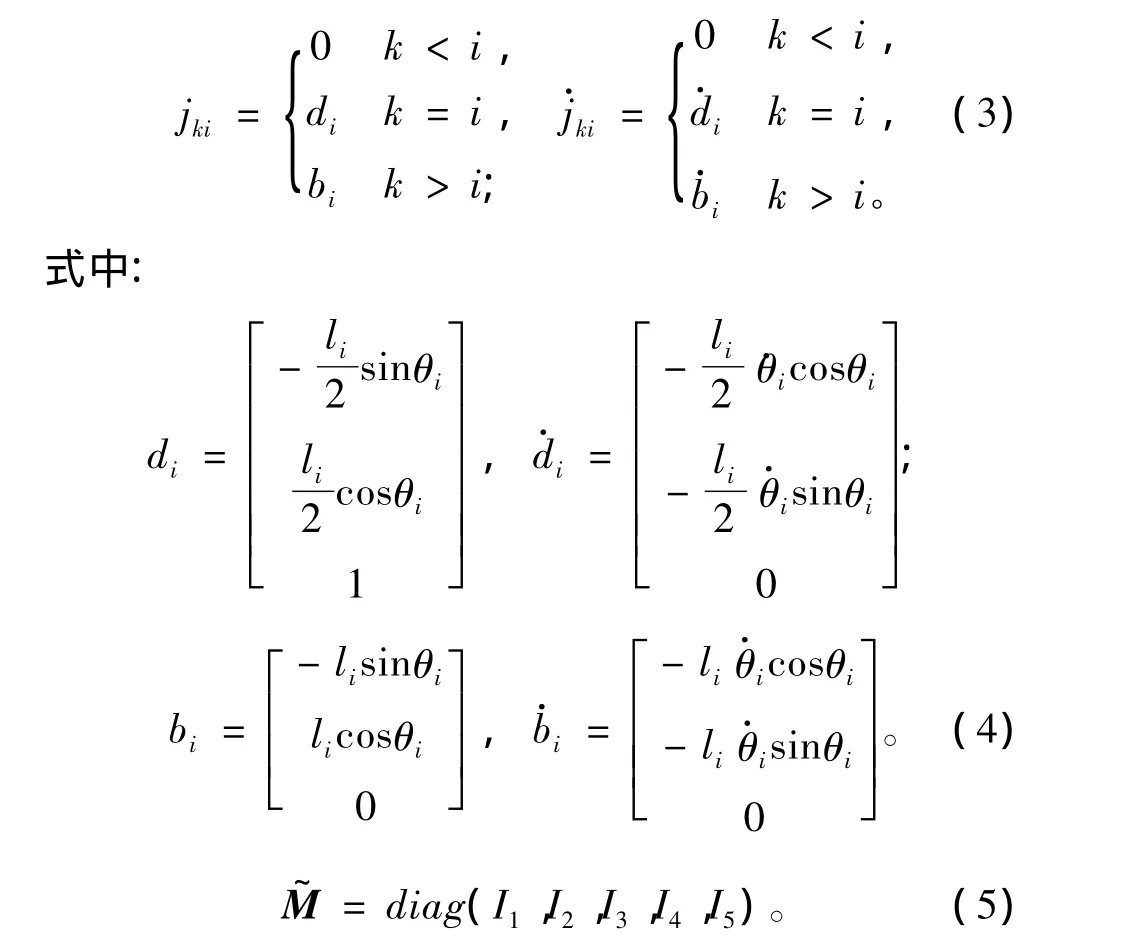
系统质量矩阵为:

系统刚度矩阵为:
系统阻尼矩阵为:

在小角度时,矩阵C由结构阻尼确定,简化为比例阻尼形式。对多自由度模型,在小角度时,令sinθi≈0,cosθi≈1,仿真模型中,各参数在Matlab工作空间中生成向量文件。
1.2 身管模型的SimMechanics实现
SimMechancis中的Flexible Element模块提供了多体系统单元体的建立方法。将5个身管单元体的密度,弹性模量等具体参数在Matlab工作空间中生成向量文件,在Simulink文件中选择Flexible Element模块,然后执行Mask Subsystem命令,就可以将身管的密度,弹性模量等数据生成的向量文件导入其中,以生成身管单元体的SimMechancis模型。为方便起见,5个身管单元体的参数设置均相同。参照以多体系统方法建立的动力学方程,选取5个Flexible Element模块封装于1个Subsystem模块中,以模拟身管的多体系统建模,并命名为Gun Tube,如图3所示。
图3 柔性身管模型Fig.3 Model of flexible tube
加入驱动和测量模块,得到柔性身管的 Sim-Mechancis仿真模型,如图4所示。其中,输入信号为身管刚性连接的高低齿弧输出的角速度,即身管轴线的角速度,经过积分可得到角位移量,微分可得到角加速度,Joint Actuator采集的就是这3个运动信息,然后驱动身管运动。Flexible Element Actuator采集的是柔性振动后炮口的角速度信息。其中,Out1,Out2和Out3分别为炮口绕X轴、Y轴和Z轴的角速度,绕Z轴的炮口速度为身管俯仰方向的角速度,因为本文研究的是高低随动系统,所以只需输出绕Z轴的炮口速度。为便于表示,以大齿轮角速度为输入,以Out3为输出,将该模型封装,命名为模块FT。
图4 柔性身管的仿真模型Fig.4 Simulation model of flexible tub
2 控制结构改进
传统的随动系统只是控制炮管轴的方向,身管振动相当于开环控制,所以无法对炮口的最终指向进行有效控制。因此,本文从炮口部获取角位移信息作为随动系统位置环的反馈信息,核心思想是利用炮口信息对系统进行反馈,则把身管振动包括在闭环控制中,以保证炮口指向为理论瞄准方向,图5为其系统结构图。

图5 控制炮管指向的系统结构图Fig.5 Structural diagram of the system controlling directionality of muzzle
将该柔性身管模型搭建在文献[3]建立的双电机驱动的随动系统上,且采集炮口的角位移作为位置环的反馈信息,就得到了如图6所示的舰炮随动系统模型。图中,WACR1,WACR2,WASR,WAPR,WATR分别为电流调节器1、电流调节器2、速度控制器、位置控制器和双电机联动控制器。其中,位置环的控制算法是系统的控制核心。
3 RBF网络PID控制器的设计
传统的PID控制方法是在获取对象数学模型的基础上,根据某一整定原则来确定PID参数。然而,身管振动具有高度非线性及时变性等特点[6],若舰炮随动系统将炮口指向的控制包含闭环控制之内,则很难得到系统的精确数学模型,传统的PID控制效果并不理想。因此,应考虑在PID控制中,PID参数的整定应不依赖于对象的数学模型,而且PID参数能在线调整,以满足实时控制的要求。
神经网络具有很强的容错性和自学习、自组织、自适应能力,以及非线性映射能力和独特的联想、记忆、储存能力。从理论上讲,RBF网络和BP网络一样可以近似任何的连续非线性函数。RBF网络在局部逼近中,对于每个输入、输出数据对,只有少量的连接权值需要调整,因而学习速度快[7]。因此,选用RBF神经网络来进行PID参数的在线整定,其控制结构如图7所示。
文献[8-9]系统论述了利用RBF神经网络整定PID控制参数的方法,这里不再赘述。其中文献[8]在MATLAB软件中书写了基于RBF神经网络整定PID控制参数的S函数,设计了RBF神经网络PID控制器的通用程序。这里将采用该方法设计舰炮随动系统的位置环控制器。
图6 随动系统仿真Fig.6 Simulation drawing of servo system
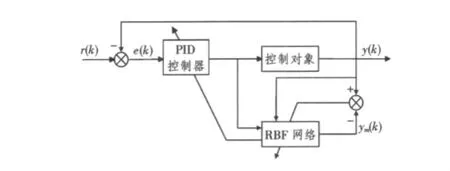
图7 RBF神经网络整定PID的控制结构Fig.7 Structure of the adaptive PID control system based on RBF NN
如何选择合适的隐节点数,以使网络学习达到要求的精度,目前还没有成熟的办法。用计算机选择、设计、再检验是一种通用的手段。这里采用该方法经过大量的仿真比较发现,8个隐节点能满足系统控制的需要,且效果较好。所以RBF神经网络的最佳参数设置为:神经网络的结构为3-8-1;采样时间为ts=0.001 s;神经网络的输入矢量选为x(k)=[Δu(k),y(k),y(k-1)]T;PID 控制的比例系数KP、积分系数KI及微分系数KD的学习速率为η1=0.2;KP的初始值为5,KI的初始值为1,KD的初始值为2;神经网络的学习速率为η=0.25;动量因子为α=0.07,β=0.01;设定隐层节点中心的初始值为3,隐层节点基宽参数的初始值为0.75,权系数的初始值为1。
4 仿真分析
以幅值为1 rad的阶跃信号为输入,运行传统PID控制器控制下的舰炮随动系统仿真模型,得到的系统响应曲线如图8所示。
由图8可见,由于身管振动的复杂性和非线性,使得整个随动系统是时变和非线性的,参数固定的传统PID控制器不能提供有效的控制,整个系统始终处于无法稳定的振荡状态。
以幅值为1 rad的阶跃信号为输入,运行RBF神经网络PID控制器控制的舰炮随动系统仿真模型,得到的系统响应曲线如图9所示。

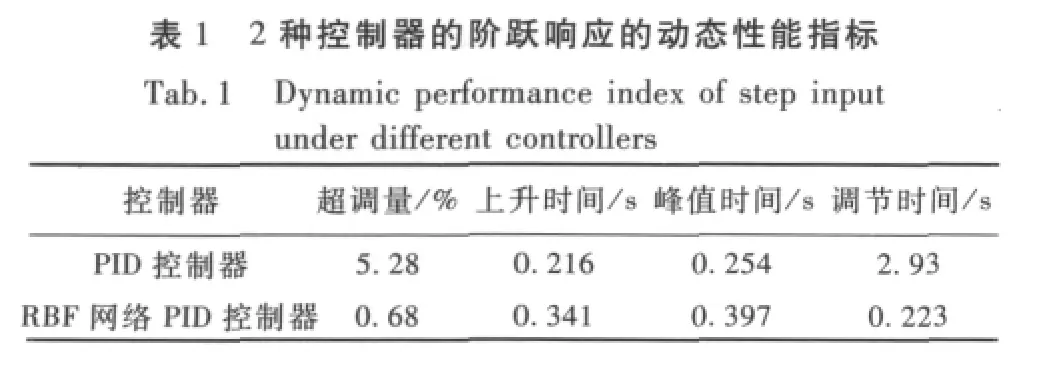
由图9可见,由于RBF神经网络可以在线整定PID控制器的参数,使得PID控制器能随着系统的变化而调整。因此,系统能稳定运行,且具有较强的抗干扰性。2个控制器分别控制舰炮随动系统的阶跃响应的动态性能指标如表1所示。由表1可见,由于RBF神经网络整定PID控制器参数是一个复杂的计算过程,所以它控制下的系统的阶跃响应的上升时间和峰值时间稍慢于传统的PID控制器,但其利用RBF网络逼近非线性函数的能力能精确地调整PID参数,具有很强的鲁棒性。
?
5 结语
仿真结果表明,本文提出的利用炮口角位移作为随动系统位置环反馈信息的控制结构,将闭环控制扩展到了炮口,可以直接对炮口指向进行控制;为改进后的控制结构所设计的RBF神经网络PID控制器能及时整定控制参数,能适应由于身管振动引起的系统变化。
[1]魏明义.火炮静态检测方法[S].国军标,1997.
[2]王德石,欧阳光耀.火炮吸振器[J].火炮发射与控制学报,1999,(1):9 -14.
WANG De-shi,OUYANG Guang-yao.On artillery vibration absorber[J].Journal of Gun Launch & Control,1999,(1):9-14.
[3]忽麦玲,张光辉,卫平.双电机驱动伺服系统的建模与分析[J].火炮发射与控制学报,2008,(2):93 -96.
HU Mai-ling,ZHANG Guang-hui,WEI Ping.Mode-ling and analysis of double-motor driven servo system[J].Journal of Gun Launch & Control,2008,(2):93 -96.
[4]GUSTAVSSON.Device for servo system with closed circuit[P].Untitled States Patent:4196380,1980 -04 -01.
[5]夏冰,编译.减小火炮系统射弹散布的方法[J].兵工学报武器分册,1987,(1).
[6]王德石.舰炮系统多刚体动力学分析[J].火炮发射与控制学报,1998,(4):1 -6.
WANG De-shi.Multi-body system dynamic analysis of naval gun[J].Journal of Gun Launch & Control,1998,(4):1-6.
[7]BARMISH B R,HOLLOT C V,KRAUS F J.Extreme point result for robust stabilization of interval plants with first order compensators[J].IEEE Transactions on Automatic Control,1992,37(6):707 -712.
[8]薛定宇.控制系统计算机辅助设计[M].北京:清华大学出版社,2006.383-390.
[9]刘金琨.先进PID控制 MATLAB仿真[M].北京:电子工业出版社,2004.43-45.
PID control based on RBF neural network of flexible gun-tube
TIAN Fu-qing1,LI Ke-yu1,LI Jin-wei2
(1.Department of Weaponry Engineering,Naval Univercity of Engineering,Wuhan 430033,China;2.The 713 Research Institute of CSIC,Zhengzhou 450015,China)
The traditional servo system can not provide the accurate control of the muzzle directionality because of the tube vibration,so aimed at the defect,a control structure which collected the feedback digital information of position loop from muzzle was put forward.A PID controller based on RBF neural network was designed for realizing the purpose of controlling the directionality of muzzle.Whose control effectivities were compared with effectivities of the traditional PID controller in simulation tests.
flexible tube;servo system;RBF neural network;SimMechancis
TJ391
A
1672-7649(2012)04-0093-05
10.3404/j.issn.1672-7649.2012.04.022
2012-02-09;
2012-03-01
田福庆(1962-),男,教授,主要从事武器系统仿真与总体设计研究。
猜你喜欢
装备环境工程(2022年7期)2022-08-10
装备环境工程(2022年7期)2022-08-10
舰船科学技术(2022年10期)2022-06-17
指挥控制与仿真(2021年6期)2021-12-17
军事文摘(2021年16期)2021-11-05
军事文摘·科学少年(2021年8期)2021-09-10
火炮发射与控制学报(2021年1期)2021-05-13
兵器装备工程学报(2020年4期)2020-05-18
舰船科学技术(2019年5期)2019-06-03
兵工学报(2017年5期)2017-06-08