无刷双馈电机运行特性的仿真研究
2012-07-09 13:32李谟发
湖南工程学院学报(自然科学版) 2012年1期
李谟发,彭 晓,黄 鹤
(1.湖南工业大学 电气与信息工程学院,株洲412008;2.湖南工程学院 电气信息学院,湘潭411101)
0 引 言
无刷双馈电机(Brushless Doubly-fed Machines简称BDFM)是在自级联感应电机的基础上发展起来的,定子上具有两套极数不同的对称三相绕组,分别称为功率绕组和控制绕组,转子采用笼型或磁阻型的结构,取消了电刷和滑环.至20世纪80年代末90年代初发展成无刷双馈变频调速电机[1].无刷双馈电机是一种结构简单、运行可靠、异同步通用的电机.它作为变频电机具有以下优点:①电机本体结构的特殊设计,取消了集电环和电刷等装置,降低了维护成本,增强了运行的可靠性.②功率因素可调,提高了调速系统的性能指标.③通过变频器的功率仅占总功率的一小部分,降低了变频器的容量,一方面降低了调速系统的成本,另一方面减少了对电网的谐波污染.④电机的运行转速只与功率绕组和控制绕组的频率和相序有关,与负载无关,因此具有硬的机械特性.⑤当变频器出现故障时,可以断开控制绕组电源,使电机运行在异步状态,提高了系统的安全性与可靠性.由于具有上述优点,使得该电机在变速恒频发电系统、大功率调速系统等场合具有很好的应用前景.所以目前世界上很多国家的专家、学者针对该电机的电磁原理与设计,数学模型与性能分析,控制方法的研究等方面做出了大量的研究工作.针对该电机的相关研究方兴未艾.
1 仿真模型的建立与运行特性的分析
在研究BDFM的数学模型时,对电机需作如下假设:①不考虑定、转子齿槽的影响,忽略铁损.②定、转子绕组对称分布.③不考虑频率和温度对绕组电阻的影响与导体的集肤效应.④忽略磁路饱和.在上述的假设情况下,先建立三相坐标下的方程,通过恒等变换可得d-q坐标下的方程.
BDFM在d-q轴下的电压方程
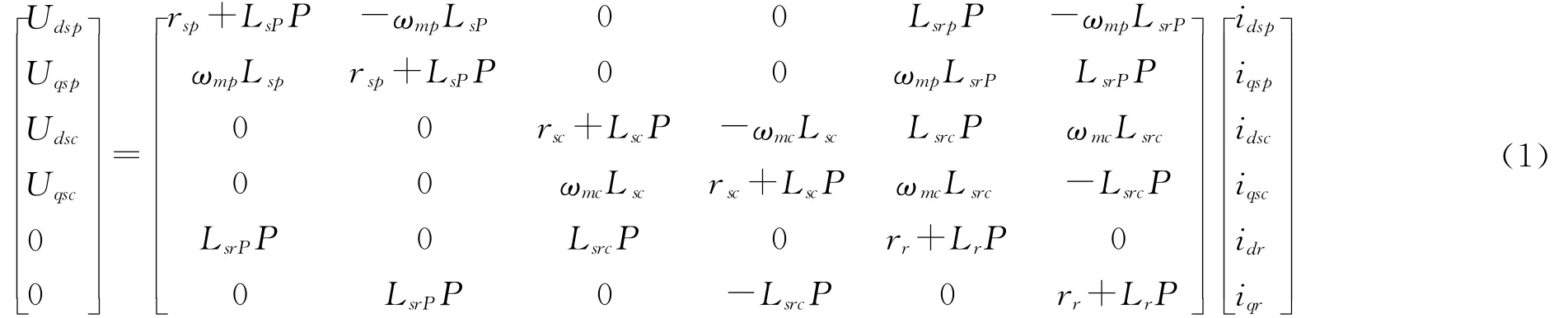
其中ωmp、ωmc与ωr的关系如下

(1)与(2)式中,U、i-电压、电流的瞬时值;Pp、rsp、LsP、LsrP-功率绕组的极对数、电阻、自感、与转子绕组的互感;Pc、rsc、Lsc、Lsrc-控制绕组的极对数、电阻、自感、与转子绕组的互感;r、Lr-转子的电阻、自感;ωmp、ωmc、ωr-功率子系统的电角速度、控制子系统的电角速度、电机的机械角速度;P-对时间的倒数;下标p-功率绕组,下标c-控制绕组;s-定子侧,r-转子侧;d、q-d、q轴分量.
电磁转矩方程


机械运动方程

式中,J-转子机械转动惯量,TL-负载转矩
仿真模型使用的电机参数如下:Pp=3,Pc=1,rsp=0.435Ω ,LsP=0.07138H,Lsrp=0.06931H,rsc=0.435Ω,Lsc=0.06533H,Lsrc=0.06021H,rr=1.63Ω ,Lr=0.1425H,J=0.03kg·m2.功率绕组始终接电压为380V、频率为50Hz的工频电源.
应用上述数学模型与电机参数,利用Simulink搭建了如下图的仿真模型
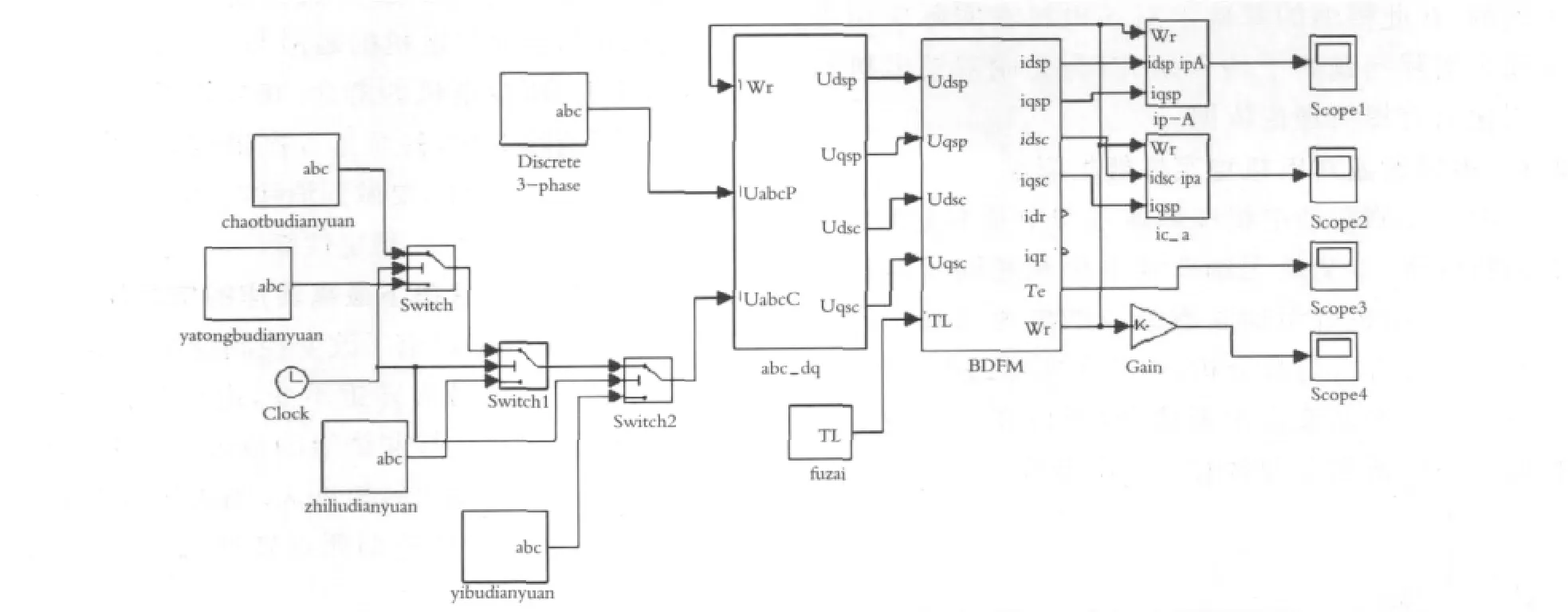
图1 无刷双馈电机在开环下的动态仿真模型
在对该模型仿真时,该电机的运行状态与所加电压、负载的变化情况如下:0~2s内异步运行,控制绕组短路;2~4s内同步运行,控制绕组加10V的直流电源;4~6s内亚同步运行,控制绕组接电源为70V,频率为10Hz;6~8s内超同步运行,控制绕组接电源为80V,频率为10Hz.在每个运行阶段的中点时刻加入20N·m的负载.在仿真时得到的速度、转矩波形图如图2所示.
无刷双馈电机的速度公式

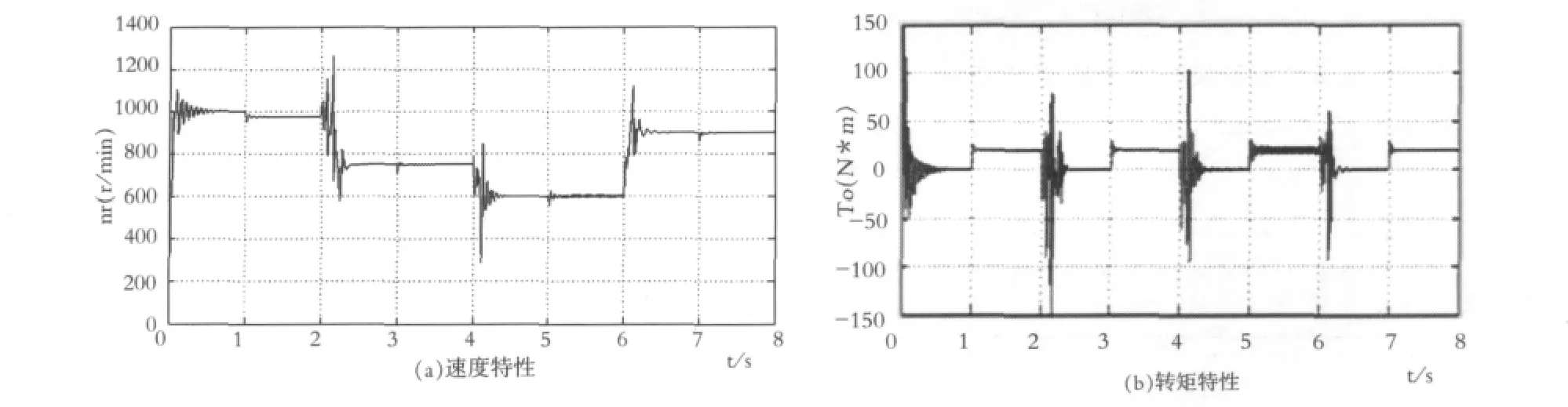
图2 开环仿真时的速度、转矩波形
取加号时两套绕组的电源同相序,取负号时两套绕组的电源反相序.通过转矩波形与速度波形分析可得,电机完成了从异步到同步、亚同步、超同步的运行过程,波形与电机的理论值相符.证明了该模型的正确性.在异步运行中加入负载速度会下降后在稳定.在同步,亚同步、超同步过程中,加入负载,速度与转矩会产生一点波动,但转矩会稳定在所加转矩值,速度会稳定在加负载前已达到的稳定值,即无刷双馈电机在双馈运行模式工作时,也具有普通同步电机的转速特性.在功率绕组所接电源不变的情况下,速度只与控制绕组电源的频率和相序有关.这特性使得该种电机在交流调速、变速恒频发电系统中有好的应用前景.
2 无刷双馈电机在应用当中几个实际问题的仿真研究
通过上述的仿真研究,验证了该电机的模型是正确的.在此模型的基础上对该电机在实际应用当中几个实际问题给予仿真研究,为无刷双馈电机的实用化研究提供理论依据.
2.1 电网谐波对电机稳定性能的影响
由于无刷双馈电机在调速过程中基本上工作在双馈特性下.本文就无刷双馈电机在超同步速运行特性下,对电机绕组加含有谐波的电源与加不含有谐波的电源进行仿真分析.由于在实际的电网当中,含有的3、5次谐波占主要成分,所以在功率绕组与控制绕组中所加电源含有3、5次谐波.
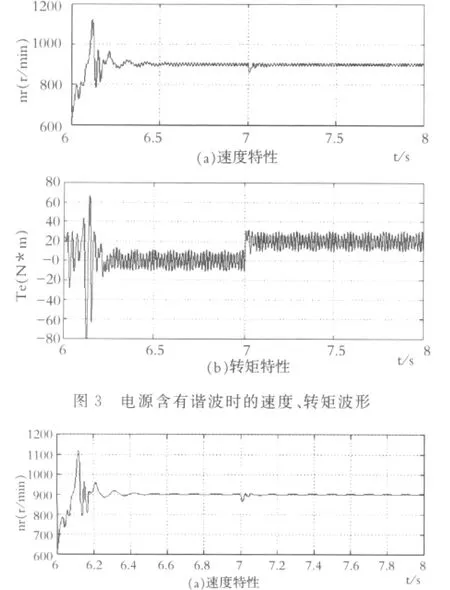
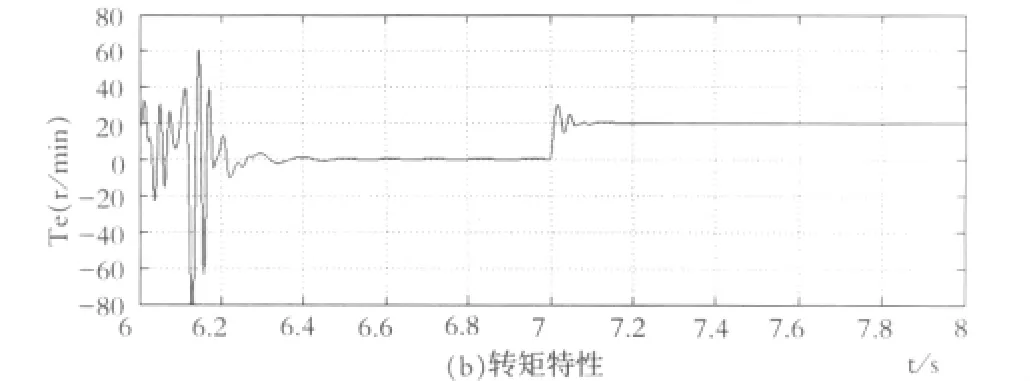
图4 电源不含谐波时的速度、转矩特性波形
通过上面几组波形可以看出,在电机绕组所加电源含有谐波时,速度、转矩波形都会在稳定值附近震荡,在不含谐波时,波形会很稳定.在变频调速闭环控制下,如果电源含有3、5次谐波,虽然会使电机稳定,但转矩与速度的震荡会要求提高开关管的工作频率,增加损耗,加大控制难度.并且当输入电机中的电源含有谐波时,会增加电机的磁滞与涡流损耗,使电机的温度上升,减少电机的寿命.在采用PWM波控制电机时,可消除3次,甚至是5次谐波,所以,在该电机的实际应用过程中,要做到消除功率绕组电源的谐波来提高电机的效率与稳定性能.
2.2 在电动运行状态下最高转速的仿真研究
文献[5]中详细讨论了改变控制绕组的电压大小时,稳定运行时的最大转矩不变,电压越高,转速运行范围越宽;当改变控制绕组的最大允许电流时,转速运行范围不变,输出转矩增大.当无刷双馈电机在电动运行时有最大转速即死点转速.此时控制绕组的频率

把此频率代入(5)式中得转子的速度为1020r/min,在上述仿真模型中,超同步运行状态下分别输入频率为18Hz,25Hz,幅值为80V的电压,分别得到下面波形图.
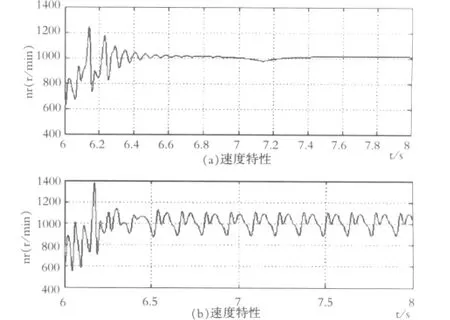
图5 不同频率下的速度波形
从这两个速度波形图分析可得,在电动运行时,电机的速度不会超过死点转速,当控制绕组的频率高于临界频率时,电机的转速不会在增大,会在最高转速附近震荡,且频率越高,速度会震荡的越厉害.甚至会出现不稳定状态.无刷双馈电机在超同步运行状态下,当频率在临界频率时速度达到最大.然而BDFM在控制绕组频率小于临界频率时,控制子系统的转子电路从功率子系统吸收转差功率;当控制绕组频率大于临界频率时,控制子系统从电网吸收电磁功率,一部分以转差功率形式传递给功率子系统的转子电路,其余转换为机械功率输出.虽然在临界频率以上速度不再增大,但控制子系统的功率形式发生了变化,这对无刷双馈电机在控制方法研究,实用化研究方面有理论指导意义.这仿真结果,对无刷双馈电机在电动运行中能达到的最大转速提供了理论指导,有现实意义.
3 结 语
(1)以BDFM在d-q轴下的数学模型为基础,应用Simulink仿真软件搭建了该电机的动态仿真模型,并对仿真模型进行分析,验证了该模型的正确性,对电机在动态特性分析与控制方法的研究、实际的硬件电路实现提供了指导意义.
(2)考虑电网含有3、5次谐波时对电机运行特性的影响,并在超同步运行时进行了仿真分析,得出了电网谐波对电机稳态有严重的影响.由于电网会含有谐波,所以在变频调速控制时,采用好的控制方法做到消除输入控制绕组中的谐波,采用滤波器对功率绕组电源滤波.
(3)仿真研究了无刷双馈电机在电动运行状态下能达到的最高转速,但在无刷双馈电机控制策略与实用化研究时应考虑在超同步运行时控制子系统的功率转换过程.
[1]R Spee,AK Wallace,HK Laue.Performance Simulation of Brushless Doubly-fed Adjustable Speed Drives[C].IEEE Industrial Applications Society Annual Meeting,San Diego,1989:738-743.
[2]彭 晓,杨向宇.无刷双馈电机的原理与结构特征[J].湖南工程学院学报,2002,12(3):1-4.
[3]邓先明.无刷双馈电机的电磁分析与设计应用[M].京:机械工业出版社,2009:103-135.
[4]张 惺,何志伟.无刷双馈电机起动与运行特性研究[J],防爆电机.2009,44(6):35-37.
[5]杨向宇,郭灯塔.无刷双馈调速电机运行范围的分析[J],微特电机.2001,29(6):29-31.
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
四川冶金(2018年1期)2018-09-25
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
电测与仪表(2015年16期)2015-04-12
电机与控制应用(2015年3期)2015-03-01