
基于桥接模式的双网络重复使用运载器控制系统冗余技术
2012-07-08 01:17:22漆光平李光杰
航天控制 2012年2期
漆光平 孙 鹏 李光杰
北京航天自动控制研究所,北京 100854
基于桥接模式的双网络重复使用运载器控制系统冗余技术
漆光平 孙 鹏 李光杰
北京航天自动控制研究所,北京 100854

根据重复使用运载器因面临恶劣电磁环境而对控制系统提出的可重用、高可靠性要求,提出了一种基于桥接控制器的四余度1773A光纤总线双网络冗余控制系统方案。该方案在实时性、数据处理、缓解信息拥塞、电磁兼容性等方面具有较好的优势,控制系统实现了集控制、传感、通信、网络、故障诊断与容错处理于一体的功能。通过对计算机、综合控制器、伺服机构等关键部组件及系统级总线进行冗余设计,提高了系统的可靠性。
重复使用运载器;控制系统;冗余技术;1773A总线;网络
可重复使用的概念由冯·布劳恩和钱学森于20世纪中期提出。可重复使用运载器(Reusable Launch Vehicle,RLV)是指可重复使用、能够快速穿越大气层、自由往返于地球表面与太空之间的多用途飞行器。它既可以快速、便利地向空间运送有效载荷,也可以较长时间在轨停留和机动飞行,在完成任务后,又可安全、准确地降落在地面,是航空、航天技术高度结合的产物[1]。可重复使用运载器(RLV)通过提高运载器本身的可靠性,采用多次重复使用,费用均摊的原则,大大降低发射费用[2]。
从上世纪50年代至今,可重复使用运载器经过六十多年的技术探索和发展,取得了不少显著的研究成果[1-3]。美国在可重复使用运载器研究领域一直处于世界前列,代表着世界发展的最高水平。从上个世纪60年代开始,美国先后开展了航天飞机、X-34,X-37,X-43A 等十余项研发计划,其中,只有航天飞机投入了实际使用。1981年哥伦比亚号航天飞机首飞成功标志着天地往返运输系统实现了部分可重复使用。2010年4月以来,美国轨道试验飞行器X-37B先后进行了2次成功飞行试验,极大地轰动了国际航空航天界。X-37B由空军快速能力办公室负责研制,由运载火箭发射入轨,执行在轨任务后可按需自主返回,水平降落在跑道上。X-37B可以在轨道停留270d,可自动离轨,再入大气层后以自动驾驶模式返回地球,将为美国提供一种可重复使用的空间机动飞行器。
此外,俄罗斯能源火箭航天公司正在研发“快船号”新一代可重复使用载人航天飞行器,也倍受关注。欧洲、日本、印度等国家和地区也纷纷提出了可重复使用运载器的计划和方案。
总的看来,当前世界各国的航天器基本上都是由一次性使用的运载火箭或航天飞机来发射,其发射费用过高,发射准备时间长,安全性也有待提高[4]。与运载火箭等一次性运载器相比,可重复使用运载器可再入大气层、降落在指定地点,进行简单维修或更换少量部件后又可再次执行飞行任务,其成本相对较低。新一代可重复使用运载器在成本、发射周期、智能自主性、重用性、安全性和可靠性方面均具有较强的优势。
由此可见,运载器的重复使用是降低航天运输成本和提高运载能力的重要措施。随着美国X-37B两次成功试飞,可以预见,不久的将来更多的新型重复使用运载器将出现[5],重复使用运载器将成为航天运输系统发展的重要方向。因此,开展可重用、高可靠性控制系统研究对于重复使用运载器的发展具有重要意义。
1 重复使用运载器控制系统构成
重复使用运载器的控制系统主要由导航与制导系统、姿控系统、地面测发控系统等组成。控制系统的功能是控制运载器沿预定飞行程序角稳定飞行,实施导航和制导控制,将卫星等有效载荷按要求的参数准确送入预定轨道,并成功自主返回。在飞行过程中,按预定时间引爆相应的火工品,为运载器其它系统提供时间信号和状态控制信号。
重复使用运载器的控制系统设备主要包括捷联惯性测量组合、飞行控制计算机、配电器、综合控制器、电源系统以及伺服子系统(包括舵机控制器及若干舵机)等。
各组成部分的功能如下:
1)飞行控制计算机作为控制系统的核心,实时进行导航信息提取、制导律和姿态控制律运算与指令输出、时序控制、总线管理、信号采集及测试、任务规划与管理等;
2)惯性测量组合用于测量运载器的线运动和角运动参数,提供制导、姿控系统用于解算位置、速度、姿态角等信息;
3)大视场星敏感器通过不同区域多次测星,利用多星矢量定姿技术,在线分离星敏感器安装误差及姿态偏差,为惯性导航提供修正;
4)太阳/地球敏感器用于在轨飞行时测量运载器轴线与太阳矢量、地球矢量之间的角度,以确定运载器在空间的姿态;
5)大气数据系统采样运载器不同位置上的压力传感器输出,根据压力分布的数值,推算大气数据;
6)雷达高度表用于测量相对地理高度作为辅助导航信息,为着陆阶段提供精确的高度信息;
7)仪表或微波着陆系统接收装置,作为辅助导航设备,向着陆过程中的运载器提供着陆引导信息,获取航向道、下滑道和距离等着陆信息;
8)综合控制器接收飞行控制计算机的控制指令,对RCS喷管进行开关控制,还可根据飞行时序对相关火工品进行引爆控制,并将相关状态信息至其他分系统(如遥测等);
9)配电器对电源系统的供电进行合理分配,实现控制系统仪器配电、转电、断电;
10)伺服子系统包括舵机控制器、舵机,飞行控制计算机输出控制指令给伺服子系统,舵机控制器完成相关伺服小回路的校正网络和信号驱动,实现对舵机的控制。
2 控制系统冗余技术
2.1 冗余技术现状
冗余技术的内涵就是通过投入超过常规设计所需的外加资源,抵消故障产生的后果,达到提高可靠性的目的[6]。冗余技术是大幅度提高系统可靠性、安全性的有效手段,可提高系统抑制和校正整体性故障的能力[7]。对于重要的控制系统或控制系统的重要环节,包括工业领域[8-9]和航空航天领域的控制系统[10],均大量采用冗余技术以提高系统的可靠性。例如,美国大力神II导弹飞行控制系统增加冗余备份系统后,其可靠性从0.887提高至0.9995。
冗余按其实现原理可分为硬件冗余技术和解析冗余技术。早期的冗余技术为硬件冗余技术,是基于多个功能相同的硬件并联实现的。硬件冗余技术虽然提高了系统的可靠性,但也有增加系统的成本、结构复杂、重量增加等不足;较为复杂的冗余技术是解析冗余技术。该技术通过利用系统不同部件之间的内在联系和功能上的冗余来实现,不需要增加硬件设备,成本低,易于实现。常用的典型的硬件冗余结构有:串联式结构、并联式结构、串并或并串式结构、表决式冗余结构、储备式结构等。冗余设计需要更多的资源,增加系统的复杂性,宜在采用其他可靠性设计不满足可靠性要求时采用[6]。
对于可靠性要求高的复杂控制系统,如航天飞机、运载火箭、导弹等飞行控制系统,需考虑成本、复杂程度、工程实现性的问题,通常将上述冗余技术综合应用,达到提高系统可靠性的目的。
2.2 冗余的必要性
控制系统作为重复使用运载器的核心系统,直接决定着飞行的成败。重复使用运载器需多次重复使用,每次飞行过程中面临温差范围大、发射及返航过载大、空间辐射干扰等恶劣工作环境,飞行时间长,飞行过程复杂,控制系统的电子设备容易受到单粒子效应的影响(主要包括:单粒子翻转、单粒子击穿等)。作为重复使用运载器神经中枢的制导、导航与控制技术,在整个飞行过程中必须满足组合体上升飞行、再入返回的要求。尤其是再入返回段,涉及多种工作方式和模式,对导航、制导和姿态控制技术的要求不仅是高精度,而且还要求运载器冗余度要高、可靠性要高。控制系统的可靠性是决定重复使用运载器正常飞行和多次重复使用最为重要的关键因素之一。
控制系统可靠性可从三个方面采取措施[6]:1)采用高可靠性元器件或部件构建控制系统。可靠性高的系统要求使用高可靠性的元器件,采用降额设计,采取隔离或防护设计提高系统的环境适应性;
2)简化系统结构,采用经过充分考核成熟的设计。采用经过充分考核成熟的设计,可以降低风险,可靠性得以保证;
3)采用冗余技术,冗余技术是提高可靠性设计的重要途径之一。
对于重复使用运载器飞行控制系统,涉及到十几种重要部组件,系统的组成复杂,需完成的自主控制功能多,对控制系统的可靠性提出了很高的要求。通常情况下,仅通过提高元器件的可靠性来保证系统的高可靠性,将给元器件制造带来难以克服的困难,代价高昂。在一定的可靠性水平的元器件基础上,采用冗余技术是提高控制系统可靠性,得到高可靠性系统的最有效的设计措施。特别是重复使用运载器飞行控制系统,面临重复使用的需求,可靠性要求极高,为保证运载器的安全性,采用冗余技术是非常必要的。
2.3 控制系统冗余设计
控制系统总体方案采用冗余技术设计,在系统设计上保证全系统至少可在一度故障下完成飞行任务,核心控制单机及总线至少按三余度设计,保证控制系统在多模故障模式下飞行成功。
为具备自主再入返航的能力,重复使用运载器控制系统的信息量相对于运载火箭而言,已大大增加,飞行时间也相对长,面临的环境也相对复杂;与战斗机控制系统相比,重复使用运载器控制系统无视频信息传输,其信息量相对少,但面临恶劣的空间电磁环境,且以自主控制方式为主。综合考虑到信息量大小及其处理与传输要求、可靠性要求、实时性要求、系统的复杂程度等因素,重复使用运载器控制系统总体架构采用基于四余度的1773A总线进行系统级冗余设计,主要包括导航与制导系统、姿控系统、配电系统和时序控制系统,形成了集控制、传感、通信、网络、故障诊断与容错处理于一体的高度综合化计算机网络,由2个局域网构成,局域网之间通过桥接计算机交换信息,如图1所示。系统除了采用分系统级冗余技术外,对重要的部组件和电路级、元器件级也采用冗余设计,以提高系统整体的容错能力和可靠度。
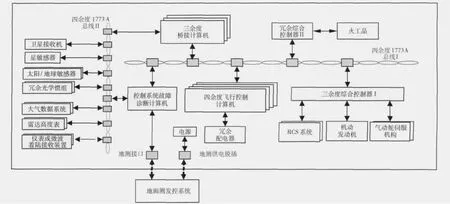
图1 重复使用运载器控制系统总体架构
2.3.1 总线冗余结构设计
对于长导线、远距离控制,从成本、可靠性和电磁兼容性角度来看,并行总线已不再适合应用,而常采用串行总线,既简单又可靠。目前,常用的总线有汽车电子中常用的 CAN串行总线[11-12]、军用1553B总线[13-14]、高档轿车使用的MOST高速多媒体传输总线[15]、1773 光纤总线[16-18]、低速 LIN 串行总线、工业控制RS232/RS485串行总线和航空ARINC629总线[10]等。随着光纤技术的不断发展以及第四代航空电子系统传输视频信息的应用需求,性能更高的SCI总线传输速率可达8~16Gb/s,而FC总线最高传输速率可达到1 ~4Gb/s[19]。
对于重复使用运载器控制系统无视频信息的传输,传输的数据量不大,但对实时性、可靠性要求高。因此,选用传输速率适中的1553B总线或其光纤版1773A总线即可。考虑到飞行过程中,面临空间粒子辐射效应、雷击、运载器内电子系统间电磁干扰、长导线效应、静电释放等影响系统正常运行的风险因素,如果系统电磁兼容性设计不够合理,可能造成系统出现严重错误、甚至致命性的问题,采用屏蔽双绞线的1553B总线已不能满足运载器在恶劣电磁环境下高性能和高可靠性的数据传输要求,而1773A总线传输速率可达20Mb/s,具有重量轻、所占空间小、抗电磁干扰、不产生电磁干扰、电气隔离性能好、无长导线效应等优点,从性能和可靠性方面来看,重复使用运载器控制系统采用1773A总线更为合理。
在本系统中采用了2个四余度1773A总线网络,满足了数据传输、实时控制、故障判别与处理和地面测发控系统对运载器进行远程测试的需求。其中,导航与制导系统由于需实时地长期与飞行控制计算机传递信息,信息量大,而独占一个网络。其余控制系统部分则构成另一个网络,该网络用于传递控制信号,完成驱动执行机构、引爆火工品等控制,对实时性要求较高,网络的负担不能过重,避免系统对控制指令响应不及时的情况出现。2个网络则通过一个三余度桥接计算机进行数据交换,实现整个控制系统的信息传递与处理,桥接计算机将导航制导信息进行解析处理后再传输,可大大减小网络数据传输量和飞行控制计算机的负担。每个网络中的三条总线用于数据传输,一条总线专用于故障诊断与处理。此种基于桥接模式的网络结构不存在网络传输性能的瓶颈问题。
三余度桥接计算机可采用FPGA可编程控制器实现,相比通用CPU,DSP控制器而言,具有处理速度快、编程灵活、接口配置按需分配、硬件多线程运算等优点。
2.3.2 四余度飞行控制计算机
由于重复使用运载器控制系统在飞行过程中容易受到空间粒子辐射,为满足控制系统对飞行控制计算机高性能、高可靠的要求,飞行控制计算机方案设计时,重点考虑了计算机冗余体系架构、故障自检和互检、多模故障隔离、瞬态故障恢复、飞行控制计算机降模重构等技术难题。
重复使用运载器的飞行控制计算机采用4个CPU主板的冗余体系架构,其中,3个CPU用于冗余控制,1个CPU用于故障诊断与处理。每个控制CPU具有一定的自检功能,每个CPU之间相互通信并具备一定的纠检错功能。在正常情况下,3个控制CPU通过2:1同步表决自检和通信互检发现故障或错误,对于瞬态故障,单个主机能够复位恢复,对于永久性故障采用屏蔽法将故障隔离。故障诊断与处理故障CPU用于识别控制CPU故障,并将故障CPU尽可能地恢复,以保证飞行控制计算机可以恢复正常工作。当发生多模故障时,在故障诊断计算机的配合下,系统能够实现从三模到单模的降模重构,达到保证运载器在多度故障情况下,仍能安全再入返航。
飞行控制计算机在结构设计时,4块CPU的PCB主板按不同的方向安装,避免被空间粒子同时击穿多个CPU出现故障。
对于CPU器件的选用,可选用F-22战机使用的Power PC系列处理器,主频可达450MHz,处理器内部采用双核结构,在实时性、运算能力等方面具有独特的优异性能;若选用国产 CPU,可考虑基于SPARC V8的处理器S698,主频可达133MHz,接口丰富。
由于重复使用运载器飞行过程复杂,设备多,基于非操作系统的飞行软件不能再胜任硬件管理的繁重工作,应采用操作系统来实现对硬件设备的集中管理。操作系统可选用VxWorks实时、多任务操作系统,适宜于航空、航天等领域对实时性要求较高的高精尖应用场合[20]。如果出于安全考虑,则可采用嵌入式Linux实时操作系统。
2.3.3 综合控制器
系统配两台综合控制器。由于综合控制器输出的信号将用于控制运载器的伺服机构及火工品等重要作动部分,其功能正常与否关系到飞行任务的成败。因此,综合控制器均采用冗余设计。其中对于火工品综合控制器II采用元器件级三取二冗余设计,综合控制器I则采用板级三冗余设计,综合控制器的输出全采用双点双线设计。综合控制器接收飞行控制计算机通过1773A总线发出的控制指令,对RCS喷管进行开关控制。还可通过1773A总线接收并转发飞行控制计算机指令和相关状态信息至其他分系统。
2.3.4 飞行控制执行机构
重复使用运载器的飞行动作控制执行机构主要包括3个部分:机动发动机伺服、RCS电磁阀和气动舵机。为满足运载器再入返回、重复使用的需求,必须提高伺服、舵机等执行机构的可靠性,采用冗余技术可以较圆满地解决这一难题。
飞行控制计算机在不同的飞行阶段通过1773A总线输出控制指令给综合控制器I控制机动发动机、RCS和气动舵。伺服子系统包括伺服机构4台(每个摇摆发动机采用2台伺服驱动,当一台伺服机构发生故障时可通过故障吸收仍能保证发动机的摇摆)、舵机共需16台,采用多冗余液压伺服系统方案。对于RCS喷管开关式姿态控制系统,由电动阀门控制,一般不单独对开关电路进行冗余设计,采用与喷管一起增加数量形成整体冗余方案[21]。
2.3.5 传感信息系统
传感信息系统是导航与制导系统和姿控系统必不可少的组成部分,其可靠性和精度将直接关系到重复使用运载器的入轨精度、返航能否准确入场,实现成功着陆。在不同的飞行段,运载器使用的传感信息不同。传感系统的设计主要依据导航与制导系统以及姿控系统所需的输入信息。导航与制导信息的冗余通过卫星导航、大气数据系统、冗余光学惯组、雷达高度表及微波着陆装置在不同的飞行段组合实现;姿控信息则通过星敏感器、太阳地球敏感器、冗余光学惯组实现姿控信息获取的冗余。
其中,惯组采用两套七表光学捷联惯组冗余、共基准安装并行工作,通过故障吸收进行冗余管理,可增强系统的可靠性。每一套捷联惯性导航系统分别由3个单自由度的陀螺和4个单自由度的加速度计构成余度惯性组件。两套惯组的3个陀螺分别沿3个正交轴安装,构成冗余系统。4个加速度表也以相似方式实现加速度表的冗余。惯组信息为导航与制导系统和姿控系统共用。
雷达高度表用于测量相对地理高度作为辅助导航信息,3台高度表互为冗余备份,为着陆阶段提供精确的高度信息,通过总线完成与飞行控制计算机的数据交换。
2.3.6 电源系统
电源系统对控制系统至关重要,如果出现掉电或供电不足的问题,将直接导致飞行的失败。借鉴当前飞机电气系统的供电思想,重复使用运载器的电源系统采用了多种电源,以集中分散方式供电,可保证在任何情况下都能保证系统的供电正常,从系统的角度实现了电源的冗余设计。
电源系统通过冗余配电器进行供配电,可根据飞行阶段和飞行任务的要求,对控制系统部分单机进行分时供电和断电控制,从而降低功耗,提高电池续航能力。
主电源采用太阳电池阵和锂离子蓄电池组联合供电。太阳电池阵展开之前,主电源中的锂离子蓄电池供电;在轨运行期间,主电源太阳电池阵和锂离子蓄电池联合供电,并为锂离子蓄电池充电;返回段,控制系统由主电源中的锂离子蓄电池供电;电动舵机功率用电由专用锌银蓄电池供电。
2.3.7 地面测发控系统
地面测发控系统主要考虑了有线测发控和无线测发控两种运行模式实现冗余。尤其是着陆阶段,如果运载器自主着陆出现故障,则可通过控制系统的无线通讯接口从自主控制切换为人工导引着陆模式,保证运载器成功返航着陆。地面测发控系统由于对飞行成败影响不大,因此,其冗余设计仅设计为双机主从热备份即可。
3 冗余效能分析
采用冗余技术可较大幅度的提高飞行可靠性。冗余度是冗余与非冗余所用资源的比值,冗余度越高,飞行可靠性提高的幅度就越大,在仍能完成飞行任务所容许的故障数就越多,但需要的资源(软、硬件)代价也越大。理论上讲是冗余度越高可靠性越高,但随冗余度的增加提高的幅度越来越小,投入效益比越小。因此,冗余度要适度,不宜过高。
控制系统冗余可分成分系统、仪器整机、电路及元器件等不同级别。在代价相同或相近的情况下,应尽可能地实现低级别的冗余设计,这样可获得更高的可靠性[6]。采用分系统级并联冗余,其可靠度相对较低,代价较大,因此,基本不采用如图2(a)所示的冗余结构。在本方案中,主要采用了电路级和仪器整机级冗余技术。重复使用运载器控制系统冗余的方式主要以双点双线并联、三取二表决及整机仪器交联解析结构方式实现。在相同硬件配置情况下,图2(b)冗余结构的可靠性高于图2(a)冗余结构的可靠性。
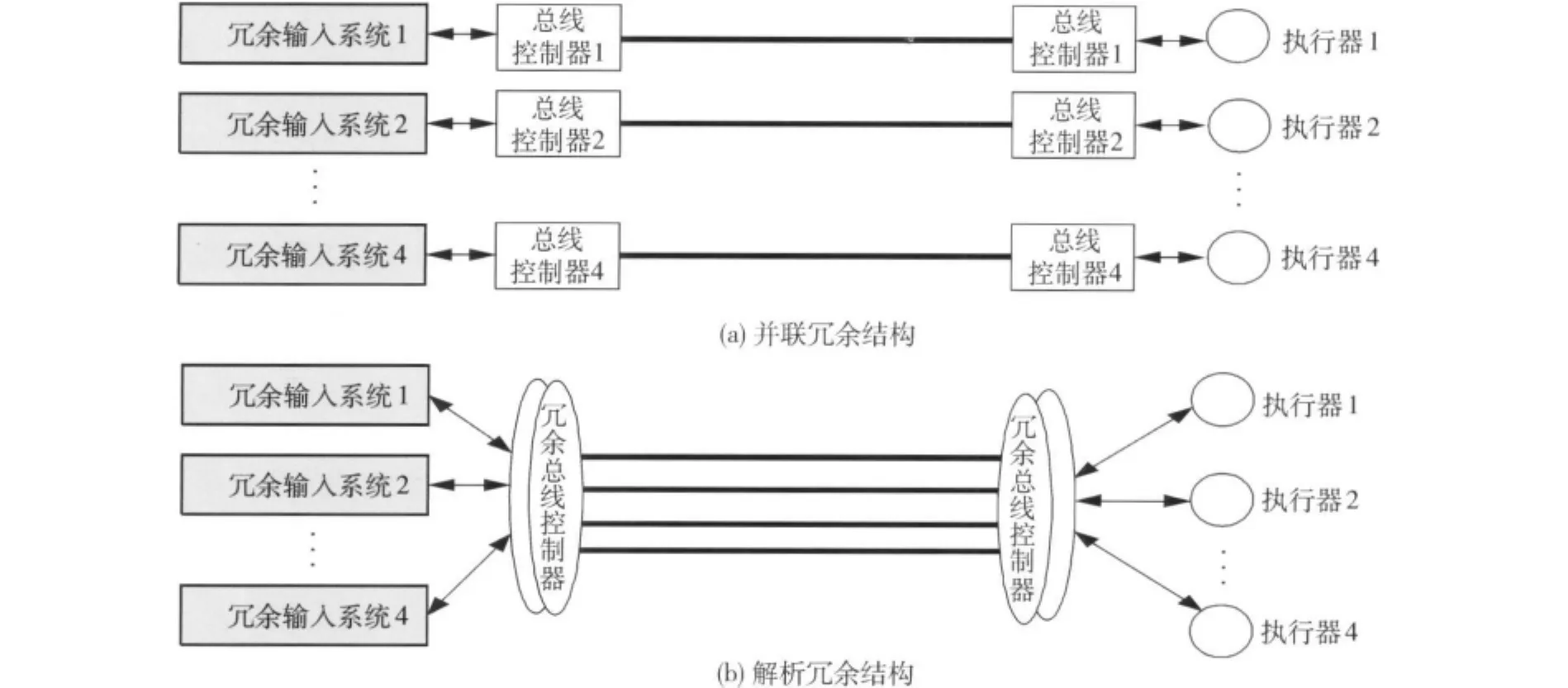
图2 系统级并联冗余结构(a)与解析冗余结构(b)
4 结论
由于重复使用运载器控制系统内部子系统间通信数据量较大且控制系统对可重用、可靠性的要求高,在当前先进军用飞机及运载火箭控制系统的冗余技术基础上,提出了一种基于桥接模式的四余度1773A光纤总线双网络冗余控制系统方案。对控制系统的计算机、综合控制器、伺服机构等关键部组件单机,系统级总线拓扑架构等解析冗余技术进行了分析,以较为合理的代价,提高了系统的可靠性,解决了重复使用运载器控制系统可重用问题。
[1]汤一华,余梦伦,等.第二代可重复使用运载器及其再入制导技术[J].导弹与航天运载技术,2010(1):26-31.(Tang Yihua,Yu Menglun,et al.Second Generation Reusable Launch Vehicle and its Reentry Guidance Technologies[J].Missiles and Space Vehicles,2010(1):26-31.)
[2]杨勇.我国重复使用运载器发展思路探讨[J].导弹与航天运载技术,2006(4):1-4.(Yang Yong.Study on Roadmap of Chinese Reusable Launch Vehicle[J].Missile and Space Vehcile,2006(4):1-4.)
[3]张登成,唐硕.美国重复使用运载器的发展历史、现状及启示[J].导弹与航天运载技术,2003(5):20-27.(Zhang Dengcheng,Tang Shuo.Development History,Current Status and Revelation of RLV in U.S.A[J].Missiles and Space Vehicles,2003(5):20-27.)
[4]余梦伦,杨勇.我国航天运载器的未来发展[J].现代军事,2006(9):30-31.
[5]康开华,丁文华.英国未来的SKYLON可重复使用运载器[J].导弹与航天运载技术,2010(6):53-56.(Kang Kaihua,Ding Wenhua.British Future SKYLON Reusable Launch Vehicle[J].Missiles and Space Vehicles,2010(6):53-56.)
[6]孙凝生.冗余设计技术在运载火箭飞行控制系统中的应用(一)[J].航天控制,2003,21(1):65-81.(SUN Ningsheng.The Redundancy Designs for Guidance and Control System of Launch Vehicle[J].Aerospace Control,2003,21(1):65-81.)
[7]杨小冈,缪栋,宋光明.导弹控制系统的冗余技术研究[J].上海海运学院学报,2001,22(3):175-178.(Yang Xiaogang,Miao Dong,Song Guangming.On Redundancy Technology of Missile Control System[J].Journal of Shanghai Maritime University,2011,22(3):175-178.)
[8]陈子平.浅谈控制系统冗余控制的实现[J].自动化仪表,2005,26(9):4-6.
[9]刘冲,周剑良,等.核电厂反应堆功率数字冗余控制系统及其可靠性[J].核电子学与探测技术,2009,29(4):713-717.
[10]王永,梁德芳.民用飞机电传飞行控制系统初探[J].航空标准化与质量,2008,(5):24-28.
[11]邓遵义,宁祎.CAN总线在汽车控制系统中的应用研究[J].机电产品开发与创新,2010,23(4):137-139.(DENG Zun-Yi,NING Yi.Research and Applications of CAN Bus in Automobile Control System[J].Development& Innovation of Machinery & Electrical Products,2010,23(4):137-139).
[12]刘立峰,廖力清,凌玉华.高低速CAN总线在汽车控制系统中的研究与应用[J].上海汽车,2005,(9):26-28.
[13]李建良,王延龄.新一代火箭控制系统总线应用技术研究[J].航天控制,1997,15(3):16-21.(Li Jianliang,Wang Yanling.Research on Bus Application Technique in Control System of New Generation Launch Vehide.Aerospace Control,1997,15(3):16-21.)
[14]顾胜,祝学军,杨华.基于1553B总线的运载火箭控制系统分析[J].导弹与航天运载技术,2005,(3):9-12.(Gu Sheng,Zhu Xuejun,Yang Hua.The Analysis of Launch Vehicle Control System Based on 1553B Bus[J].Missiles and Space Vehicles,2005,(3):9-12.)
[15]张宏彬.宝马E65 MOST总线光纤传输技术及其故障分析[J].客车技术与研究,2008,(3):41-44.
[16]邱先佩,戴耀君.试飞成功的光纤数据总线[J].航空电子技术,1996,(3):9-17.
[17]陈冬梅,杨一栋.基于1773光纤数据总线的光传飞控系统[J].海军航空工程学院学报,2005,20(3):245-348.
[18]蒋德中,宋征宇,周德祥.1773光纤数据总线技术与应用研究[J].航天控制,2006,24(5):10-13.(Jiang-Dezhong,Song Zhenyu,Zhou Dexiang.1773 Fiber-optic Data Bus Technique and Application[J].Aerospace Control,2006,24(5):10-13.)
[19]崔剑,李铮,郑铮.新一代航空机载光纤数据总线[J].光通信技术,2005,(7):38-42.
[20]刘震,林辉,等.基于VxWorks的多电飞机电气控制系统的软件研究[J].航空计算技术,2004,34(4):60-63.
[21]孙凝生.冗余设计技术在运载火箭飞行控制系统中的应用(二)[J].航天控制,2003,21(2):68-80.(SUN Ningsheng.The Redundancy Designs for Guidance and Contral System of Launch Vehicle[J].Aerospace Control,2003,21(2):68-80.)
The Redundant Technology Based on Bridge-Control-Double-Networks for Reusable Launch Vehicle Control System
QI Guangping SUN Peng LI Guangjie
Beijing Aerospace Automatic Control Institue,Beijing 100854,China
According to the reusable and reliable requirements for the reusable launch vehicle flying in the wicked electromagnetism condition,a scheme,based on the redundant technology of current plane and launch vehicle,is proposed in this paper.The two local networks are included in the scheme,which can communicate each other by one bridgeCPU.The communication media is four-backup1773Afiber-optic bus,which has many virtues such as excellent ant-jamming,high communication throughput and simple structure.The bridge-connection based on networks enables the control system has the abilities such as control,sense,communication,networks,fault detection and management.Furthermore,the redundant technologies are adopted in the key modules of the control system.The core-computer,colligation controller,servo mechanism and data bus makes up of the control system with adequate fault tolerance.The control system is realized with reasonable cost and high reliability.
Reusable launch vehicle;Control system;Redundant technology;1773Afiber-optic bus;Networks
TP273;TP336
A
1006-3242(2012)02-0089-07
2011-12-21
漆光平(1977-),男,四川人,博士,工程师,主要研究方向为控制系统综合设计;孙 鹏(1979-),男,哈尔滨人,硕士,高级工程师,主要研究方向为控制系统综合设计;李光杰(1972-),男,北京人,研究员,主要研究方向为控制系统综合设计。
猜你喜欢
上海质量(2019年8期)2019-11-16 08:47:46
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年8期)2018-11-25 07:42:08
电子制作(2017年2期)2017-05-17 03:55:06
电测与仪表(2015年6期)2015-04-09 12:01:18
电子设计工程(2015年8期)2015-02-27 12:05:26
风能(2015年9期)2015-02-27 10:15:24
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15
