
共直流母线多电机系统的混杂动态模型及调度
2012-07-06 12:32李继方汤天浩
电工技术学报 2012年5期
李继方 姚 刚 汤天浩
(1.上海海事大学物流工程学院 上海 200135 2.开封大学机电工程学院 开封 475004)
1 引言
在工业生产中,回收并利用电机回馈再生电能已成为电机系统节能的重要途径之一[1]。研究表明,这部分制动再生电能非常大,如采油系统中,抽油机用电机有33.67%的时间处于发电状态,发电电量占总用电量的12.85%[2];在轨道交通中,电力机车制动再生电能一般为牵引电能的30%甚至更多[3]。为充分回收并利用这部分巨大的再生电能,人们提出了多电机共用直流母线的节能方法,但该方法存在直流母线电压升高设备不能正常运行、功率扰动对电网有影响以及节电效率不高等缺点,为此开展共直流母线多电机节能系统建模及多电机协调调度算法研究,对于保持直流母线电压稳定、减小直流母线功率扰动对电网的影响、实现系统最大限度节能等都具有重要的现实意义。
共直流母线多电机系统是典型混杂系统,难以采用常规的建模方法来建模,为此引入混杂系统理论。目前已有不少学者开展了混杂系统理论在电力系统的应用研究,并取得了丰硕成果[4-6]。针对混杂系统在电力系统中的建模研究,赵洪山等建立了基于可编程赋时Petri网技术的混杂电力系统模型,给出了建立模型的方法和步骤[7];徐大平等利用混杂自动机理论建立了风力发电机组的混杂系统模型,设计了基于自动机模型的全程混杂控制系统[8]。
考虑到系统中电机的状态是交替出现并与直流母线相互作用的离散行为,本文建立了共直流母线多电机系统的活动周期图模型。活动周期图是用来表示系统内实体间的逻辑流程,描述实体间相互作用的一种建模方法,尤其适用于具有状态交替出现属性的系统[9-11]。文献[12]基于活动周期图法建立了EZStrobe通用仿真系统;为便于活动周期图模型的仿真,文献[13]提出了一种从活动周期图到Java程序的自动编译方法。而把活动周期图建模方法推广到混杂系统领域建立共直流母线多电机节能系统模型,通过协调调度多电机状态,提高系统性能的研究目前尚无文献报道。
本文在分析共直流母线多电机节能系统的特点和性能的基础上,提出一种由不可控整流器、储能装置加多电机调度构成的系统,通过对用于离散事件系统建模的活动周期图法部分定义的扩展,将该建模方法推广到混杂系统,建立共直流母线多电机节能系统活动周期图模型。针对此模型,提出一种多电机协调调度控制算法。采用该算法,分电机状态均匀分布和全部均处在耗能状态两种初始工况,仿真研究共直流母线6台和20台起重机节能系统的直流母线功率,验证提出系统的合理性和协调调度算法的有效性。
2 共直流母线多电机节能系统
为充分回收并利用电机制动时的再生电能,人们提出通过共用的直流母线,使处在耗能状态电机吸收处在制动状态电机再生电能的方法,既消耗了再生电能,又达到了节能目的。但是该方法存在着制动状态电机再生的电能不能被耗能状态电机完全吸收条件下,直流母线电压升高,设备无法正常运行或损坏等问题。该问题的常规解决方法是在直流母线上接入耗能电阻或回馈装置,通过其消耗或回馈不能被耗能状态电机完全吸收的再生电能,保证设备的正常工作[14]。但电阻耗能的方法,节能效果不好;回馈电网的方法,控制复杂,成本较高,且只适用于不易发生故障的稳定电网电压下(电网电压波动不大于10%)[15]。为提高系统性能,把耗能电阻或回馈装置换成储能装置,储存这部分不能被耗能状态电机完全消耗的再生电能,当耗能状态电机需要时,再回送直流母线。为此要设计容量足够大的储能装置,满足储能需求,这将增加系统成本,且控制复杂,实现困难。综上分析,文章提出了一种由不可控整流器、储能装置加多电机调度组成的共直流母线多电机节能系统,如图1所示。
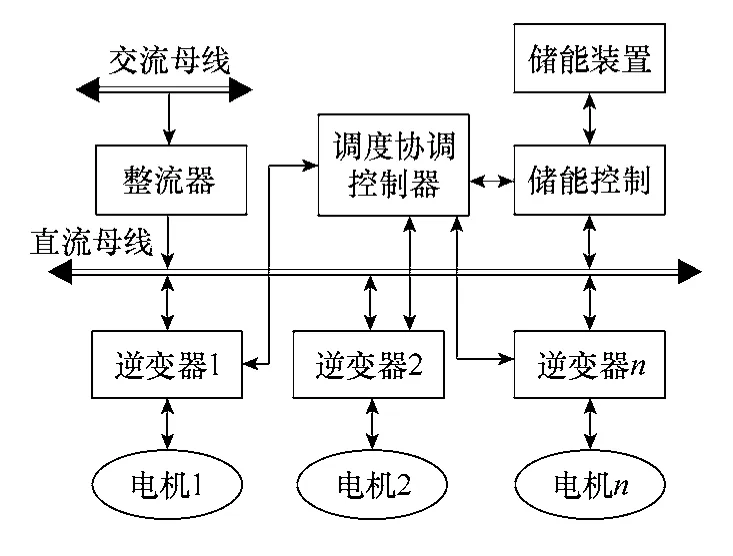
图1 共直流母线多电机储能加协调调度系统Fig.1 The multi-motor common DC bus system by scheduling and energy storage
系统用一个大的整流装置取代原有的多个整流装置,不但节能,而且节约成本;系统中既没有耗能装置,也没有回馈装置,而是用储能装置取代,这样既提高节能效果,又避免直接回馈对交流电网的冲击。储能装置的容量既能满足系统能量存储的需要,又不至于因储能装置容量太大而过多的增加系统成本。为减小储能装置的容量,通过协调调度电机工作状态,使处在耗能状态电机消耗的电能大于处在制动状态电机再生的电能,系统始终运行在耗能状态,不需要储能。储能装置仅是考虑到调度算法的有限性,极端情况下无法保证调度效果而作为冗余保留的,因此储能装置的容量要比没有对电机调度时要小得多,通过研究高效的多电机调度算法,选择较小容量的储能装置,就能保证系统的可靠运行。
3 共直流母线多电机系统活动周期图模型
3.1 扩展活动周期图
活动周期图[11-13](Activity Cycle Diagrams,ACDs)方法来源于Tocher的随机齿轮概念,主要用于离散事件的建模。该方法将实体分为活跃和闲两个状态,用如图2 所示的两个基本图符表示,具有简洁、明了等优点。状态之间用不同的线型表示各实体的状态变化历程。
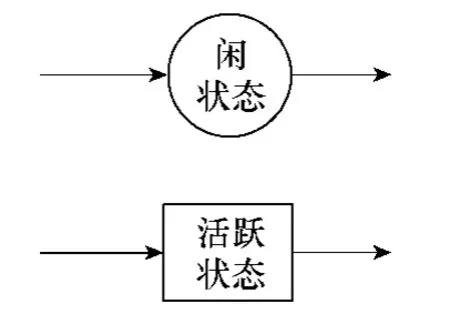
图2 活动状态和与队状态Fig.2 Queue state and activity state
活跃状态表示实体正与不同类型实体合作从事某项活动。状态的生命周期一般能事先确定,仿真中可根据工况的不同按某种指数分布随机产生。闲状态则是实体正等待某事件发生,与其他实体没有联系。其持续时间在模型中无法事先确定,一般取决于它紧前、随后的状态和与它相互作用的实体资源量。
活动周期图法建模的基本步骤是先分别画出各实体的活动周期图,但实体的活动周期图必须满足:①实体的活跃状态与闲状态必须交替出现;②实体初始状态与终止状态必须相同。然后将各实体活动周期图合并得到系统活动周期,并在系统活动周期图中,标明各实体资源占用(或拥有)量及约束条件。
活动周期图的运行方法是:①根据系统初始状态,确定临时实体和永久实体初始状态;②根据服务优先级和约束条件,确定活动发生的实体;③确定当前时间;④根据当前时间,确定活动完成的临时实体;⑤返回第二步。活动周期图既可由计算机来仿真,也可由人工来运行,运行的主要依据是时间。
为将传统ACDs 建模方法推广至混杂系统,建立共直流母线多电机系统模型,需扩展部分定义:
(1)在传统ACDs 中,临时实体需要永久实体参加协同活动,占用永久实体的资源量或释放永久实体的资源量具有常量属性,难以直接用于共直流母线多电机这类混杂系统的建模。为解决这一难题,本文中引入随时间、活动进程或其他参量的改变而变化的连续变量,用其描述电机与直流母线相互作用时的功率交换。
(2)在传统ACDs 中,闲状态持续时间一般无法事先确定,为研究电机对直流母线功率的需求状况,在仿真时闲状态持续时间可根据工况不同,按照某种指数分布随机产生。
3.2 共直流母线多电机系统活动周期图模型
在共直流母线多电机节能系统中有两类实体:直流母线和电机。直流母线是功率服务永久实体,多台电机是多个临时实体。直流母线为每台电机(临时实体)提供功率服务,存在供电、馈电、等待三个状态,其活动周期图如图3 所示,其中供电、馈电为实体直流母线的活跃状态。临时实体电机在不同工况下,具有不同的状态数,为使模型具有一般性,设其有待耗、耗能、待馈和馈能四个状态,其活动周期图如图4 所示,其中耗能和馈能状态是电机的活跃状态,待耗和待馈是闲状态。永久实体的供电和馈电状态与电机的耗能、馈能状态相对应,协同完成整个活动,合并直流母线活动周期图和电机活动周期图,可得共直流母线多电机节能系统的活动周期图如图5 所示。

图3 直流母线活动周期Fig.3 Activity cycle diagram for common DC Bus

图4 电机活动周期图Fig.4 Activity cycle diagram for motors

图5 系统活动周期图Fig.5 Activity cycle diagram for system
如果系统中有n台电机,那么临时实体电机状态持续时间T(t)为

式中Ti(t)—第i个电机持续时间;
T2i,T4i—电机处于耗能和馈能状态的生命周期(活跃状态);
T1i,T3i—电机处于待耗和待馈状态的持续时间(闲状态),其持续时间为与工况有关的指数分布。
于是t时刻n台电机与持续时间T(t)相对应的状态可表示为

式中 Si(t)—第i 个电机的状态,且

在t时刻n台电机对应状态下占用直流母线的资源量(功率)为

式中

Pi(t)为第i个电机占用直流母线的资源量(功率)。显然,电机处在待耗和待馈状态时,P1i(t)=P3i(t)=0。电机处于耗能状态时

式中Po—机械设备输出功率;
η—机械设备传动效率;
E—运行过程中的系统储能。电机处于馈能状态时

将式(7)、式(8)代入式(6),得到

则t时刻直流母线功率

式中,“⊙”表示作矢量的Hadamard 积;Q∈R4为 电机状态矢量,其中元素

M∈Rn,其中元素

分析式(10)可知,共直流母线多电机节能系统的活动周期图模型与其物理背景吻合,因而所建模型的动态变化能够充分体现共直流母线多电机节能系统的动态变化。
4 共直流母线多电机调度算法
4.1 调度方法
活动周期图的调度一般有基于时间和基于资源量两种,基于资源量调度是给定永久实体资源量,通过调度提高永久实体资源量的利用指数;基于时间调度是不给定永久实体的资源量,按照某种工况随机产生临时实体闲状态持续时间,在充分满足临时实体对资源量需求的前提下,通过调度减小永久实体的资源量。因此本文采用基于时间的调度,研究电机对直流母线的功率需求,减小系统直流母线功率的扰动。基于时间调度的基本方法是在可调度状态(一般为闲状态)时段,通过算法计算闲状态调度时间,作为可调度状态持续时间的延时时间,调整随后状态的发生来实现。
对于共直流母线多电机系统,若电机有四个状态,电机的活动周期图如图4 所示。电机有待耗和待馈两个闲状态,根据工况不同,待耗和待馈状态均可作为可调度状态,或者其中的一个作为可调度状态。通过对闲状态持续时间的调整,调度电机状态,减小直流母线功率扰动,提高系统性能。
4.2 调度时间
考察有n台电机的共直流母线系统,电机在各状态的分布如图6 所示。

图6 系统电机运行状态Fig.6 System motor running state
可以发现,系统中全部电机功率均匀分布在各状态时,即在任一时刻t,有

式中,T1av、T2av、T3av、T4av分别为电机在待耗、耗能、待馈、馈能状态的平均持续时间。由能量守恒知,必有

即耗能状态电机消耗的电能一定大于制动状态电机再生的电能,此时制动状态电机再生的电能被耗能状态电机完全吸收,系统节能效果最好。为此定义电机分布均匀度如下:
定义:电机分布均匀度是指电机在所有状态分布的均匀程度。如果系统中有n台电机,电机整个周期平均运行时间是Tav,每台电机与前面一台电机的时间间隔分别是ti(i=1,2,…,n)。则电机分布均匀度B表示为
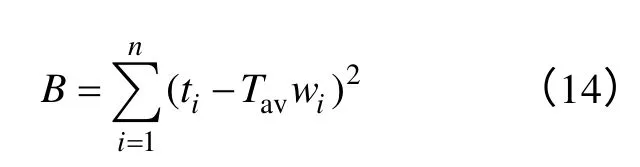
式中,w为与电机功率相关的加权,wi=αP2i(t);α为加权系数,
当B→0 时,电机收敛于均匀分布。
设t时刻第k台电机处在可调度状态,调度时间为Δtk,现对第k台电机协调调度,调度前电机分布均匀度如式(14)所示,调度后电机分布均匀度为

令 ∂B/(∂ Δtk)=0,得到最优调度时间Δtk为

由于调度时间Δtk只能向后延时,故当Δtk<0时,取Δtk=0。
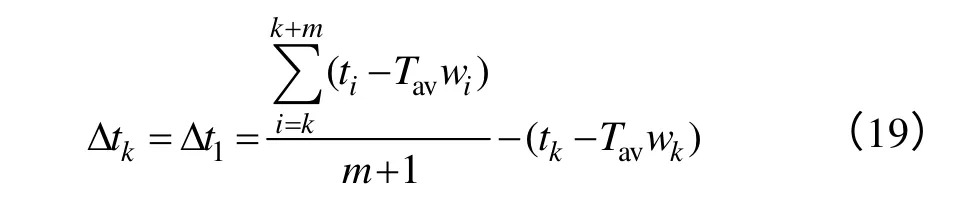
这里Δtk是第k台电机以第k-1,k+1 台电机运行状态进行一次调度。当需要以多台电机状态调度时,若t时刻第k台电机处在可调度状态,以第k-1,k+1,…,k+m台电机运行状态对第k台电机进行调度。根据m台电机状态开展调度,需要m次调度后才能显现本次调度的性能,设每次调度时间为Δtj(j=1,…,m),类似于式(15)的推导过程,可得第m次调度后Bm为

电机分布均匀度变化量ΔB为

令 ∂ΔB/(∂ Δtm)=0,j=1,2,···,m,求解多元方程组得调度时间Δtk为
同样调度时间只能向后延时,当Δtk<0 时,取Δtk=0。当对第k+1 台电机调度时,重复上述过程。
5 仿真研究
在工程实际中,共直流母线多电机节能系统被广泛应用,但电机状态的数目、持续时间差别较大,本文仅以起重机为例进行仿真研究。
分析起重机的作业过程,可以发现起重电机有四个工作状态,其活动周期图与图4 相同,其中的待耗和待馈两个闲状态均为可调度状态。起重机在各状态的持续时间Ti服从4 维高斯分布,即Ti~N4(μ,δ)。在t时刻若对第k台起重机的待耗状态进行调度,则Ti~N4(μ1+Δtk,δ1,1),若对待馈状态进行调度,则T3k~N(μ3+Δtk,δ3,3)。根据活动周期图运行规则及调度算法,利用Matlab 软件,编写仿真程序,对系统进行仿真。通过对港口轮船装卸起重机系统实地考察,仿真中设μ=(4,2,4,1.5),Δ=diag{0.5,0.3,0.5,0.3},η=60%,p0=0,系统储能E是均值为1.2×106J,方差为3×105的正态分布。
考虑电机数目和初始状态对系统的影响,采用两种初始状态下的有6 台和20 台电机共直流母线多起重机系统进行仿真研究。
(1)6 台和20 台起重机初始均匀分布在各状态,未加入调度算法和加入调度算法后直流母线功率和分布均匀度如图7、图8 所示。
可以发现,由于系统启动时起重机均匀分布在各状态,分布均匀度B≈0,直流母线功率扰动较小,在2.5×104~3.5×104之间;随着系统运行时间增长,起重机状态的随机性增强,在没有加入调度算法时,6 台和20 台起重机系统的分布均匀度增大,分别达到28 和73。直流母线功率扰动也增大,分别在-2×104~5×104、-4.5×104~13.5×104之间。功率扰动较大时,扰动对电网的影响也较大。直流母线功率为负时,说明耗能状态电机不能完全吸收制动状态电机所再生的电能,将引起直流母线电压升高,并降低系统节能效果。加入调度算法后(见图7c、7d 和图8c、8d),6 台和20 台起重机系统的分布均匀度一直较小,并保持在3 以下。直流母线功率扰动也始终较小,分别在0~1.8×104、0.5×104~5×104之间,且功率始终为正,说明耗能状态电机完全吸收了制动状态电机再生的电能,不会引起直流母线电压升高,节能效果最好。验证了算法在此初始条件下的有效性。
(2)6 台和20 台起重机初始均处于待耗状态,未加入调度算法和加入调度算法后直流母线功率如图9 所示。
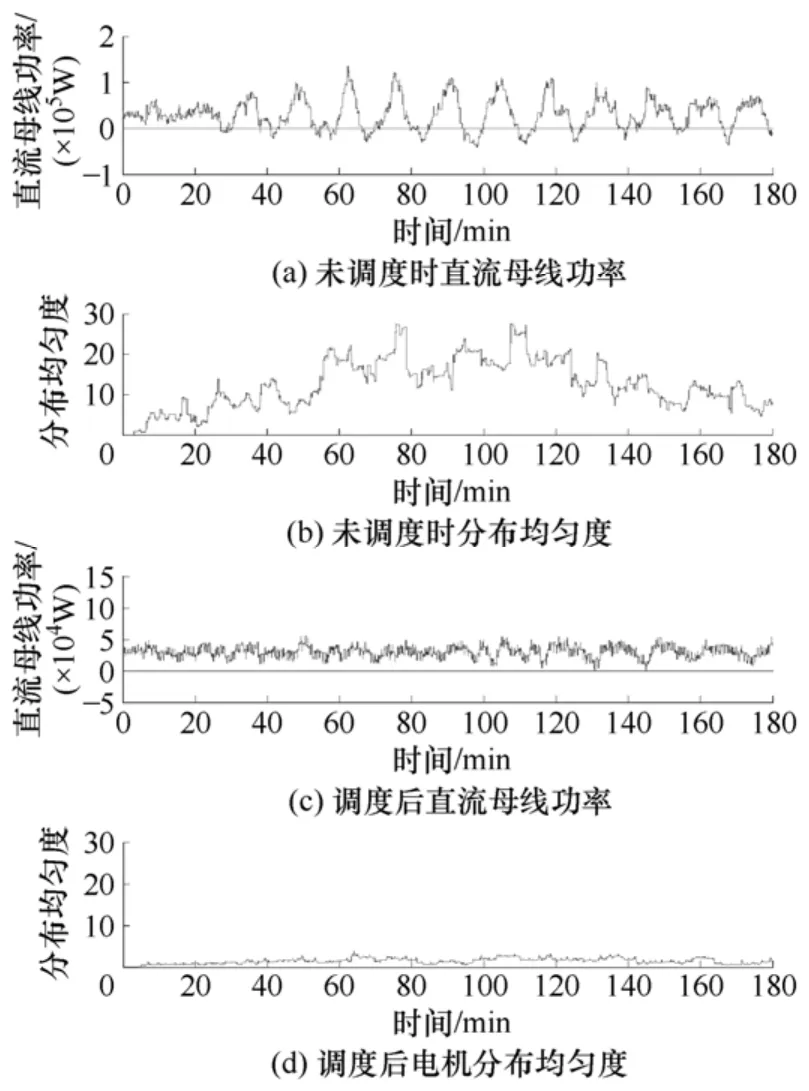
图7 20 台起重机直流母线功率和分布均匀度Fig.7 The connon DC bus power and uniformity waveforms of the 20 motors

图8 6 台起重机直流母线功率和分布均匀度Fig.8 The connon DC bus power and uniformity wave forms for the 6 motors

图9 实际工况下直流母线功率波形Fig.9 The power waveforms for the DC bus at actual working conditions
未加入调度算法的6 台和20 台起重机系统直流母线功率如图9a 和9c 所示。系统启动时,临时实体起重机以正态分布概率,在一个相对短的时间段内,多台电机由待耗状态执行耗能状态,消耗直流母线功率;而后在另一个相对短的时间段内,多台电机由待馈状态执行馈能状态,回馈能量到直流母线,因此直流母线功率扰动较大,6 台和20 台起重机系统的直流母线功率分别在-3×104~-9×104和-0.9×105~2.7×105之间。随着系统运行时间增长,电机状态的离散性增强,功率的扰动有所减小,但仍保持较大扰动,分别在-2×104~7×104和-0.5×105~-1.8×105之间。
加入调度协调算法后的6 台和20 台起重机系统直流母线功率如图9b 和9d 所示。系统刚启动时,由于起重机活跃状态发生较集中(集中电动耗能或集中制动回馈),调度效果不是很理想。随着系统运行时间增长,功率扰动逐步减小,收敛在0~2×104和0.1×105~0.6×105之间。比较图9a 和9b、图9c和9d,发现加入调度算法后直流母线功率扰动降低了约3 倍,并且除系统启动时功率始终为正,验证了调度算法的有效性。
为了避免系统启动时直流母线功率较大扰动,并保持较小的储能装置容量,采用顺序起动加调度的方式,即多台起重机按一定的时间间隔逐步启动。其仿真结果如图10 所示。可以看出,采用顺序起动加调度算法的共直流母线多电机节能系统,既实现了最大限度的节能,又保持了共直流母线功率的稳定。

图10 顺序起动直流母线功率波形Fig.10 The power waveforms for the common DC bus at starting order conditions
6 结论
文章构建了一种由不可控整流器、储能装置加多电机调度共同组成的共直流母线多电机交流传动节能系统,建立了基于扩展活动周期图的系统模型,基于该模型提出了多电机调度算法。该调度算法能有效调度电机工作状态,使制动状态电机再生的电能最大限度的被耗能状态电机吸收和利用,保持直流母线电压和功率的稳定,提高了系统性能。但由于电机状态的离散性,当电机数目较少时,电机功率在各状态近似相等的条件很难满足,因此该调度算法适用于电机数目较多的场合。
[1]钱照明,张军明,吕征宇,等.我国电力电子与电力传动面临的挑战与机遇[J].电工技术学报,2004,19(8):10-22.Qian Zhaoming,Zhang Junming,Lü Zhengyu,et al.Challenge and oportunity for pwer electronics and electrical drive in China[J].Transactions of China Electrotechnical Society,2004,19(8):10-22.
[2]赵智,鲍兵,赵中山,等.基于采油系统的公共直流母线变频器结构分析及应用[J].电气应用,2008,27(14):24-26.Zhao Zhi,Bao Bing,Zhao Zhongshan,et al.Analysis and application for structure of converter common DC bus based on oil recovery system[J].Electrotechnical Application,2008,27(14):24-26.
[3]许爱国,谢少军,姚远.基于超级电容的城市轨道交通车辆再生制动能量吸收系统[J].电工技术学报,2010,25(3):116-124.Xu Aiguo,Xie Shaojun,Yao Yuan.Regenerating energy storage system based on ultra-capacitor for urban railway vehicles[J].Transactions of China Electrotechnical Society,2010,25(3):116-124.
[4]Rafal Goebel,Ricardo G Sanfelice,Aandrew R Teel.Hybrid dynamical systems[J].IEEE Control Systems Magazine,2009,29(2):28-93.
[5]颜钢锋,仝庆贻,赵光宙.基于混杂系统理论的电力系统电压稳定性研究[J].浙江大学学报(工学版),2005,29(5):637-642.Yan Gangfeng,Tong Qingyi,Zhao Guangzhou.Research on voltage stability of power system based on hybrid system theory[J].Journal of Zhejiang University(Engineering Science),2005,29(5):637-642.
[6]马幼婕,王新志,刘昂.混杂动态系统理论及其在电力系统中的应用[J].天津师范大学学报(自然科学版),2006,26(4):68-72.Ma Youjie,Wang Xinzhi,Liu Ang.Hybrid dynamic system and its application in power system[J].Journal of Tianjin Normal University(Natural Science Edition),2006,26(4):68-72.
[7]赵洪山,米增强,牛东晓,等.利用混杂系统理论进行电力系统建模的研究[J].中国电机工程学报,2003,23(1):20-25.Zhao Hongshan,Mi Zengqiang,Niu Dongxiao,et al.Power system modelling using hybrid system theory[J].Proceedings of the CSEE,2003,23(1):20-25.
[8]徐大平,高峰,吕跃刚.基于混杂系统的风力发电机组建模与控制[J].动力工程,2009,29(4):369-374.Xu Daping,Gao Feng,Lu Yuegang.Modelling and control of wind turbine based on hybrid system[J].Journal of Power Engineering,2009,29(4):369-374.
[9]林健.三阶段法与活动周期图[J].北京航空航天大学学报,1995,21(3):76-81.Lin Jian.Three phase approach and activity cycle diagrams[J].Journal of Beijing University of Aeronautics and Astronautics,1995,21(3):76-81.
[10]Paul Ray J.Activity cycle diagrams and the three phase method[C].Proceedings of Winter Simulation Conference,1993:123-131.
[11]王维平.离散事件系统建模与仿真[M].北京:科学出版社,2007.
[12]Martinez Julio C.EZStrobe-general-purpose simulation system based on activity cycle diagrams[C].Proceedings of Winter Simulation Conference,2001:1556-1564.
[13]De Lara Araújo Filho Wladimir,Hirata Celso M.Translating activity cycle diagrams to Java simulation programs[C].Proceedings of the IEEE Annual Simulation Symposium,2004:157-164.
[14]刘永峰,谢吉华.变频器回馈制动研究[J].变频器世界,2008(8):52-54.Liu Yongfeng,Xie Jihua.Reserch on feed-break in frequency converter[J].The World of Inverters,2008(8):52-54.
[15]王云飞,杨耕.通用变频器-感应电机系统的电机耗能型制动控制方法[J].电工技术学报,2006,21(1):87-92.Wang Yunfei,Yang Geng.Power loss braking method for general inverter-fed induction motor drives[J].Transactions of China Electrotechnical Society,2006,21(1):12-18.
猜你喜欢
测控技术(2021年10期)2021-12-21
中国外汇(2019年18期)2019-11-25
中国特种设备安全(2018年10期)2018-12-18
石油化工建设(2018年2期)2018-07-11
通信电源技术(2018年3期)2018-06-26
哲学评论(2017年1期)2017-07-31
领导决策信息(2017年9期)2017-05-04
领导决策信息(2017年9期)2017-05-04
船舶标准化工程师(2015年5期)2015-12-03
电源技术(2015年11期)2015-08-22
