
船舶螺旋桨负载模拟装置设计
2012-07-04 02:45吴雁
船电技术 2012年12期
吴 雁
(武汉船用电力推进装置研究所,武汉 430064)
0 引言
舰船电力推进是指以柴油发电机组或其它多种灵活的方式获得电能,以电机直接推动推进器的舰船推进方式。与传统的舰船推进方式最大的区别是用交流或直流电动机直接驱动螺旋桨,易于获得理想的拖动特性,提高舰船的操控性、机动性等优点,是今后船舶推进的发展趋势[1]。
船舶电力推进系统中推进电动机的负载特性与船、水、航速和转速都有关系。
传统的电力推进系统试验设备多使用水力测功器作为模拟负载,水力测功器的体积庞大,安装麻烦,成本高,负载调节不精确(特别是电机低速段),数据采集不便,难以进行负载特性试验,更重要的是试验过程中产生的能量以热的形式散失掉,能源浪费巨大。
所以,研制螺旋桨模拟负载装置对船舶电力推进系统的设计与控制研究有着重要作用。
1 船舶螺旋桨负载模拟装置硬件设计
船舶螺旋桨负载模拟装置不仅能够模拟船舶在不同航行状态下相对应的螺旋桨机械负载特性,而且可以作为一种通用控制装置,完成各种具备典型机械负载特性的负荷加载[2]。
螺旋桨负载装置的硬件系统组成如图 1所示,该系统主要由直流发电机、计算机控制系统、主控电路、信号传感器和变送器、冷却系统和控制装置等组成。
1) 直流发电机
功率200 kW,电压400 V。
2) 计算机控制系统
由工业控制计算机、A/D、D/A、I/O和计数脉冲量测量板等组成。
3) 主控电路
具有断相、过载、欠压等保护,并与计算机控制和推进电机控制进行连锁保护。
4) 信号传感器及变送器
被测信号通过0~5 V电压或4~20 mA电流信号,脉冲信号进行整形,开关量进行滤波,便于实时采集。
5) 冷却系统
冷却方式为强迫风冷。
6) 控制装置
采用全数字控制器。
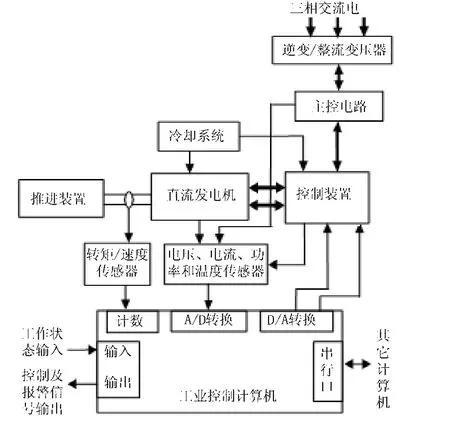
图1 螺旋桨负载模拟装置硬件系统组成
2 螺旋桨负载模拟装置软件设计
螺旋桨负载模拟装置软件主要包括螺旋桨特性计算程序相关数据库和系统监控软件。
2.1 螺旋桨负载模型建立
船舶电力推进通过控制推进电动机拖动螺旋桨负载推进船舶运动。推进电动机及其控制系统的各项参数要与螺旋桨负载相匹配才能够更好的发挥电力拖动的优点。
螺旋桨是安装在船尾,它的工作受船体运动的影响,同时由于螺旋桨的存在和工作,船体的流场也发生变化,从而使船体的航行阻力也发生了变化。在综合考虑船体和螺旋桨之间的相互作用来建立螺旋桨负载模型,并结合三次样条插值方法确定螺旋桨模型中阻力、推力系数和转矩系数,根据参考文献和某条船舶的试验数据,建立如下的数学模型[3]。
船体运动的运动方程为

式中:m为船体质量;k为附连水系数;阻力Ff由Ff- us获得;t由图谱t-us获得。
螺旋桨对船体产生的推力为

螺旋桨作用在推进电机轴上的阻转矩为

建立了船桨的运动模型就可以方便地利用计算机来求解。当初始船速已知,可以获得船舶电力推进系统数学模型结构框图如图2所示[4,5]。
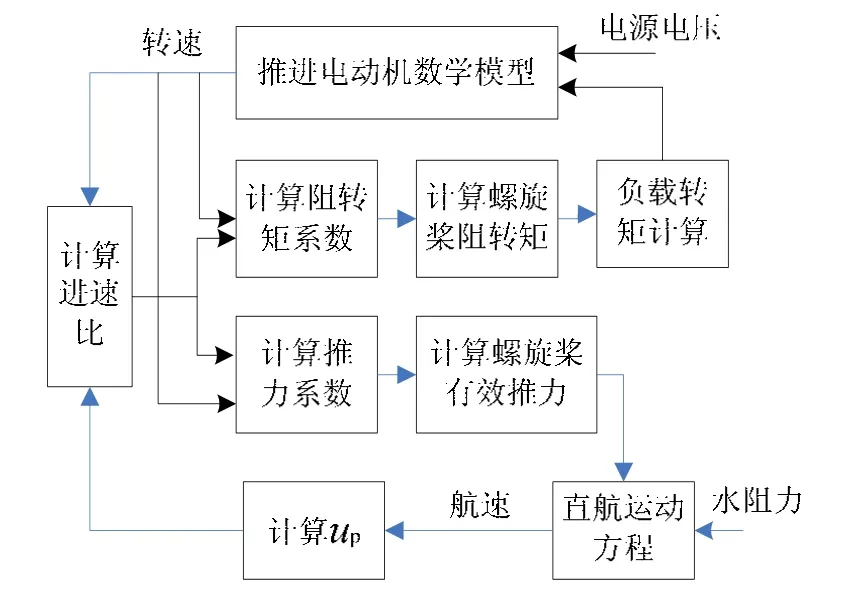
图2 船舶电力推进系统数学模型结构框图
螺旋桨特性计算程序依据以上所述船舶螺旋桨负载模型编制。
2.2 控制软件
控制软件要求能够实现显示、控制、负载选择、数据存储等功能。
设计监控软件结构如图3所示。
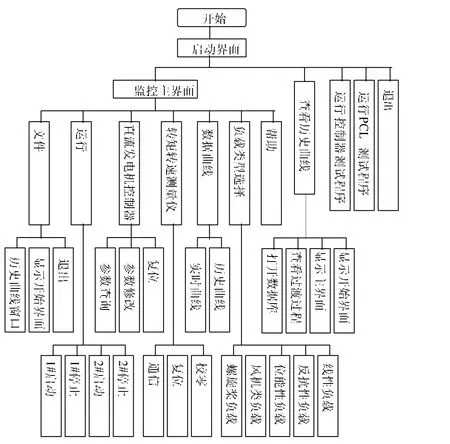
图3 螺旋桨负载模拟装置监控软件结构
3 船舶螺旋桨负载模拟装置试验研究
3.1 试验系统构成
试验系统构成如图4所示。包括六相双Y绕组电励磁同步电动机、同步电动机控制器和螺旋桨负载模拟装置三部分。其中,同步电动机控制器采用两组三相逆变器为同步电动机的两套Y绕组供电。
3.2 螺旋桨负载模拟试验
转速从 400 rpm经过不同过渡时间调节到-400 rpm所对应的螺旋桨负载模拟试验曲线如图5~图8所示。图中,浅色曲线为给定的负载特性,深色曲线为负载模拟装置产生的模拟负载。
试验验证该负载模拟装置具备很好的保护功能。

图4 电力推进模拟装置控制系统结构图

图5 过渡时间为4 min的模拟试验曲线
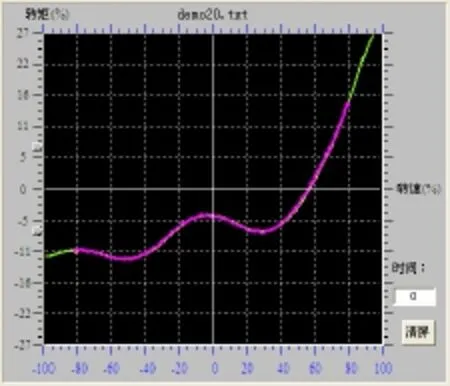
图6 过渡时间为2 min的模拟试验曲线
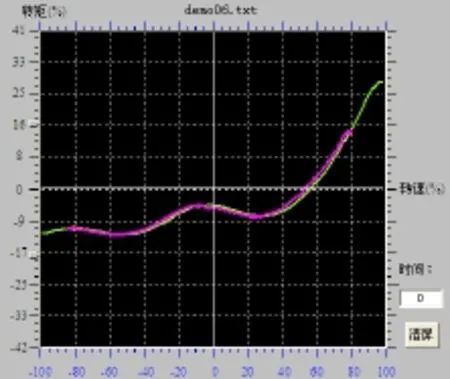
图7 过渡时间为1 min的模拟试验曲线

图8 过渡时间为0.5 min的模拟试验曲线
4 结束语
通过文中的分析和实验结果可以验证设计方案的可行性和正确性。
电力推进拥有很好的发展前景,作为一系列配套的电力推进船舶陆用联调试验配套设备,螺旋桨负载模拟装置具备广泛的应用空间。
考虑到大吨位船舶推进系统的使用现状,螺旋桨负载模拟装置的研制有必要向更大功率的方向发展。
[1]顾绳谷. 电机及拖动基础(下册)[M]. 北京: 机械工业出版社, 2010.
[2]李殿璞编著.船舶运动与建模. 哈尔滨: 哈尔滨工程大学出版社, 1999: 255-265.
[3]Oyvind Notland Smogeli. Control of marine propellers from normal to extreme conditions[D]. Norwegian University of Science and Technology, 2006.
[4]刘勇, 从望. 螺旋桨负载特性动态仿真实验的研究.船电技术, 2002: 22-25.
[5]陈实如, 王军等. 船用螺旋桨负载动态试验仿真装置研究. 船电技术, 2001.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
航空发动机(2020年3期)2020-07-24
兰台世界(2017年10期)2017-06-01
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
焊接(2015年9期)2015-07-18
海军医学杂志(2015年2期)2015-02-27
中国舰船研究(2014年6期)2014-05-14