
便携式测深仪换能器模拟装置设计与实现
2012-07-04 02:45吴永明
船电技术 2012年5期
吴永明
(海军902厂,上海 200083)
0 概述
测深仪是舰艇中用于测量、指示和记录深度的航海设备,它对于保障舰艇的正常航行起着不可替代的作用[1]。换能器作为测深仪的传感器,是其最主要的功率部件,起着将电信号转换成声波信号,并接受转换来自海底回波信号的作用[2]。由于换能器安装在船底,其价格昂贵,位置特殊,又具难拆卸性,难维修性的特点,舰艇进坞后若技术指标正常一般不进行拆卸更换。污排期间换能器暴露在空气中,测深仪严禁通电调试,中修调试时没有换能器的接入测深仪系统就无法构成一个完整的回路,测深仪的各种性能测试及调试都无法进行。目前国内测深仪型号众多,换能器工作频率,功率等指标各不一样,在工厂为测深仪中修调试而建造换能器水池成本高,需配备的各种型号换能器也是一笔巨大费用,而且水深为固定值,无法进行动态调试[3]。在舰艇航行或锚泊时出现测深仪无水深信号情况下,若有换能器模拟装置帮助则可以判定测深仪主机性能好坏及进行必要的动态性能调试[4]。综上所述,研制测深仪换能器模拟装置对于测深仪内场中修动态调试和日常临抢修保障具有重要的意义。
1 换能器模拟装置整体方案
1.1 硬件部分
为了方便日常舰上临时抢修保障,换能器模拟装置在结构上要尽可能做到紧凑轻便,便于携带,设计采用模块化的便携式箱式结构,如图 1所示,其所有单元均装入箱体中。
设计的换能器模拟装置主要由阻抗匹配箱、信号模拟发生器、主控制器、回波信号产生器、主操作屏和高精度电源组成,如图2所示。
阻抗匹配箱和测深仪相连,接收测深仪发射信号,并模拟实际换能器负载,提供与之匹配的功率损耗和电转换动态曲线。
回波信号产生器产生回波信号,其强度、频率和间隔时间通过触摸屏由操作人员控制。信号模拟发生器根据主操作屏命令,产生出模拟测深仪发射信号,幅度和频率信号通过触摸屏传到单片机后,幅度大小由数模转换器产生模拟信号与由信号发生器产生的信号相乘产生幅度和频率可调的交流信号作为回波信号回送给测深仪,回波信号的时间间隔由幅度控制模拟信号0/V控制,从而模拟出海水的深度。

图1 换能器模拟装置模块结构

图2 换能器模拟装置组成图
主控制器检测测深仪发射的信号,包括发射幅度、频率、脉宽、功率等,并处理和储存各种信号,发送到显示屏上模拟显示,完成整个系统的控制功能。
主操作屏:一要采用触模屏显示测深仪发射信号的各种参数,包括发射幅度、频率、脉宽、功率等;二要设定回波信号的各种参数(参数设定):包括预定水深、回波衰减比、回波幅度、回波频率、回波脉宽五项内容。三要设定测深仪型号及其代码,以提供与其相配的阻抗匹配装置。控制器要根据操作界面仪提供总体的发射信号,幅度、频率等可调。
电源提供所有部件的高精度工作电源,包括±5 V/1 A、±12 V/3 A、+24 V/0.8 A,纹波小于5 mV。
主操作屏提供型号选择命令,控制换能器模拟装置阻抗匹配选择,提供回波控制命令;主控制器控制回波信号产生器产生回波信号的幅度、频率和间隔时间,并提供模拟功能,通过控制信号模拟发生器发出测深仪的信号;提供自身功能的检测和系统的正常运行,换能器模拟装置的功能都在主操作屏上反映出来。
1.2 软件部分
测深仪换能器模拟装置系统的软件编程环境与辅助软件如下:
a) 软件编程环境
Windows XP操作系统下的 Visual Basic6.0编程。
b) 辅助软件
PICMATE仿真软件。
2 换能器模拟装置设计实现
2.1 硬件部分
(1)主操作屏
采用日本光洋公司 GC-53LC2/LC3 5.7触摸屏,可提供强大的画面功能,操作方便。
(2)电源部件,
采用开关电源和线性电源,提供所有部件的高精度工作电源,包括+/-5 V(纹波小于1 mV),±12 V(纹波小于 3 mV), +24 V(纹波小于 5 mV)。
(3)信号模拟发生器
采用信号发生芯片MAX038产生0~500 kHZ标准交流信号,交流信号的频率控制采用电容选择(1Nf/50nF)和 MAX518调整 FADJ与 Iin来实现。波形的失真调整由精密电阻分压控制DADJ调整占空比来实现,减少失真度。为了只通过交流信号,在输出端加了隔直电容,MAX038芯片在+/-12 V输出波形的幅度为峰-峰值 3.4 V左右,产生的波形由 OUT 端口输出,通过运放进行零点调整以及驱动放大后输出。MAX518通过IIC总线与MCU相连接。通过MCU可以改变信号发生器的频率调整端FADJ&Iin以及COSC,从而控制信号发生芯片输出0~500 kHZ的不同频率信号。
(4)回波信号产生器
信号发生器采用美国MAXIM公司MAX518 D/A模块及MAX038信号发生器和AD公司的乘法器AD532,由主控制器内的W77E58单片机控制,放大系数由 MAX518控制运放来调节[1]。MAX518 D/A模块产生的0~+5 V的电压信号,0~500 kHz标准交流信号的频率由K1、K2、U1共同决定,幅度由U23产生电压的大小决定。具体流程是:由触模屏设定的频率值送入MCU,控制K1、K2、U1从而决定频率输出,触摸屏设定的幅度或衰减比送入MCU控制,MAX518产生0~+5 V的电压信号经过OP07运放放大后送入乘法器 AD532的 7号端,与信号发生芯片MAX038产生的标准交流信号相乘,生成最大峰-峰 10V的交流信号,然后电容耦合输出,送到OPA547进行信号的幅度调整,最后以回波信号返送给测深仪系统。
(5)主控制器
主控制器采用WINBOND公司的W77E58单片机[5],如图3所示。
由于待采样信号频率范围较宽,而且速度要求较高,最高可达 500 kHz,因此设计采用峰值采样器将波形的幅度值采出,同时产生控制信号控制高速A/D(2 MHz)转换器转化,转化结束的信号作为通知 MCU的信号,同时为了提高速度也作为自己的读出输入信号,避免需要软件控制降低系统速度。MCU一旦得到此转化结束信号在最多9个机器周期内响应中断,将数据总线上的数据装入片外RAM,同时脉冲计数器加1(作为计算频率用)。采样一个周期后(>20 ms)将值送回触摸屏,然后在触摸屏上显示相应的模拟波形的幅度、频率。从而达到测量的目的。为了提高数据采样速度和连续度,信号采样部分采用硬件自动触发方式,软件编写以数据保存为首要任务。因此系统软件用中断方式把数据更新保存,定时器仅使用一个中断,同时开通一个内部计数器与脉冲计数器一起计算频率。其他程序全采用查询方式如串行通讯。[2]在与上位机通讯时也必须以数据采样优先,只有当数据采样结束时才允许通讯(因为一般频率脉冲宽度在 ms级,基本不影响通讯响应)。
(6)阻抗匹配箱
阻抗匹配箱是主功率部件,接收发射信号,产生与实际相匹配的功率损耗和响应曲线,电阻和电容的大小由换能器的等效电阻与电容决定,采用的阻抗匹配箱具体组成如图四所示:通过接入不同的电阻、电容来达到模拟不同型号换能器等效电阻与电容的目的。其组成如图4所示。

图3 主控制器

图4 阻抗匹配箱组成
(7)主控制器与触摸屏之间的串行通讯电路
主控制器与触摸屏之间的串行通讯采用MAX232芯片实现电平转换,采用一个9芯插头与触摸屏之间的串行通讯接口相连,主控制板与触摸屏之间的串行通讯协议采用CCM协议。
2.2 软件部分
软件部分设计采用两部分:触摸屏操作系统和采集控制系统。软件的数据流程图如图5所示:
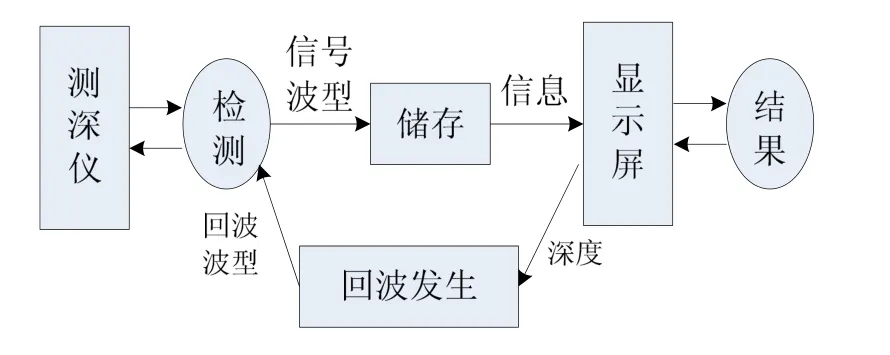
图5 软件的数据流程图
(1)触摸屏操作系统
在触摸屏操作系统环境下,采用 K-BASIC和PLC通讯等语言。软件采用模块化和开放式设计思想,面向对象的设计方法,便于软件的维护和扩充。软件框图如图6所示。
(2)采集控制系统
采集控制系统采用 PICMATE仿真环境,通过汇编语言编制总线通讯程序、波型采集程序、带宽内插算法程序、阻抗匹配程序、回波产生程序等各个子单元。
在编程中,代码实现文件的组织原则如下:一是由于信号采集频率高,时间短,因此,高速采集储存程序模块为主程序,其他模块均为分时进行。二是有一些函数是针对某一类设备的,针对性比较强,分别被放到不同的文件中。

图6 软件框图
3 换能器模拟装置应用情况
换能器模拟装置样机完成后,经过实验室的长期试用、并与 SDH-1A、SC-4、SDH-6、H/HSQ001A等型号测深仪进行联机调试,证明换能器模拟装置的技术性能指标稳定可靠,测试精度高,能完成多种测深仪的整机动态调试和参数整定,测试结果如表1所示。

表1 测深仪换能器装置测试表
4 结束语
测深仪换能器模拟装置能完成测深仪换能器的电特性模拟,使测深仪构成一个完整的闭环系统,能满足不同型号不同工作频率测深仪的内场中修调试,节省了建造换能器水池和购置换能器所需大量费用,并且能应用于日常测深仪的临抢修保障,具有显著的军事经济效益。
[1]余立立, 施朝健, 黄震民. 基于 DDS的测深仪回波信号源[J]. 上海海事大学学报, 2009, (03): 12-16.
[2]余振华, 张其善, 杨东凯. 基于W77E58单片机的图形液晶显示的设计与应用[J]. 计算机工程与应用,2008, 22: 25-29.
[3]吴永明, 王志飞. 基于虚拟仪器技术的便携式线路板自动测试系统研究[J]. 船电技术, 2008, (03):44-47.
[4]郭发滨, 申宏, 雷宁. 水声换能器动态吃水与传感器技术探讨[J]. 海洋测绘, 2005, 25(5): 5-10.
[5]莫喜平, 朱厚卿, 刘建国等. 新型低频大功率水声换能器[C]. 2001全国水声学学术会议, 2001.
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
声学与电子工程(2021年3期)2021-10-13
装备制造技术(2019年12期)2019-12-25
电子制作(2018年19期)2018-11-14
西安电子科技大学学报(2018年5期)2018-10-11
知识就是力量(2018年7期)2018-07-11
电子制作(2018年2期)2018-04-18
科技创新导报(2016年8期)2016-10-21
雷达与对抗(2015年3期)2015-12-09
电源技术(2015年2期)2015-08-22
