
大气层内拦截机动目标的变结构末制导律设计
2012-07-04 11:29:10司学慧李小兵张东洋
电光与控制 2012年6期
司学慧, 李小兵 , 张东洋, 张 彦
(空军工程大学导弹学院,陕西 三原 713800)
0 引言
战术弹道导弹(TBM)在现代战场中已成为重要的威慑力量和纵深打击力量,对防空系统的威胁越来越突出。拦截TBM与拦截空气动力目标具有明显不同的特点,拦截弹不再具有速度和机动能力的优势[1],这就对制导系统提出了挑战。现役的导弹防御系统,如爱国者-3,箭-2等,采用传统的比例导引方式,在精确探测和预估的技术优势上,能够对以纯弹道方式再入而不进行任何机动的TBM实现有效拦截[2]。而随着TBM性能的不断提高,高速大机动目标的出现,采用传统的导引方式对付机动再入的TBM,已不能取得令人满意的效果,即不能实现直接碰撞[3-6],因此新的导引方案的研究设计具有重要的意义。
弹道导弹突防的最优机动策略具有“棒-棒”结构形式,即先以最大加速度向一个方向机动,然后突然转向相反方向机动。但是在实际情况下,TBM难以获得拦截弹的状态信息,甚至对拦截弹的存在都一无所知,因此多采用螺旋机动的方式进行突防[1-2,6]。文献[6]设计了一种基于零控脱靶量的最优制导律,可以使脱靶量稳定在零附近,具有很高的制导精度,但是该制导律需要的目标信息较多,抗干扰能力较差,对信息误差比较敏感。因此,国外对螺旋机动目标的拦截多以该制导律为基础,而研究不同的状态估计器,以获得精确的目标信息。而国内的研究则以变结构制导律为主,变结构制导律具有对不确定目标机动和其他未建模动力学进行补偿,并且有几乎同比例制导律一样应用简单的特点,满足拦截机动目标对导引律的要求。文献[2]设计了一种基于零控脱靶量的变结构末制导律,能够使零控脱靶量迅速趋于零,对再入螺旋机动目标的机动加速度不敏感,可以较小的机动获得较高的导引精度,而且不易抖动,但是该制导律对变结构强度项的要求也十分严格。本文通过推导预测制导方程,以预测制导误差为滑动模态,设计了一种变结构末制导律,最后仿真结果表明,设计的制导律对螺旋机动目标的鲁棒性较强,具有一定的参考价值。
1 导弹与目标的相对运动模型
由于导弹拦截目标的末制导过程时间很短,导弹机动主要是改变速度的方向,大小改变很小,而且导弹的动态特性比制导回路的动态特性要快得多。为简化问题,这里作以下假设:1)导弹和目标均可视为质点;2)导弹和目标上所施加的加速度矢量仅仅改变速度的方向而不改变速度的大小;3)可以忽略导弹的动态特性。
以纵向平面为例,惯性参考坐标系下的导弹目标非线性运动学关系如图1所示。

图1 导弹与目标相对运动关系Fig.1 Relative motion geometry of missile and target
其运动方程组为
其中:下标m和T分别表示导弹和目标;R为导弹与目标的相对距离;q为目标的视线角;θm和θT分别为导弹和目标的弹道倾角;Vm和VT分别为导弹和目标的速度;am和aT分别为导弹和目标的加速度;amn和aTn分别为导弹和目标垂直于视线的加速度分量;δ和β分别为导弹和目标的速度方向与弹目视线的夹角。
式(1)中第四式两边对时间求导可得


因为 aTn=aTcos(θT-q),amn=amcos(θm-q),根据假设2),式(2)可以简化为

选取控制量u=amn干扰f=aTn,则式(3)变为

2 制导律设计
滑模变结构控制理论具有抗干扰能力强、对参数摄动不敏感的特性,因此被广泛应用于制导律设计。
2.1 基于预测导引的制导方程[7-9]
预测导引的目的是使导弹在攻击机动目标时能够获得直线弹道,或者机动到直线上飞行。目标加速度在垂直视线方向上的分量为aTn,则目标到与导弹相遇时,在垂直视线方向上飞行的距离为

tgo为剩余飞行时间,计算公式为

对导弹不再输出制导指令,到命中目标时在垂直视线方向上飞行的距离为

令Rm=RT,则导弹可按直线弹道命中目标,且满足

式(8)左右两边都除以tgo,并将式(1)中第四式代入可得

式(9)即为基于预测导引原理的制导方程,只要保证式(9)得以实现,就能使导弹以近似直线的弹道命中目标。但是,在实际的末制导过程中,制导方程通常是不等于零的,存在一定的误差,设制导方程误差为

2.2 变结构末制导律设计
在末制导段,目标往往以较大的加速度机动逃逸,为了保证导弹能够以较平稳的弹道飞向目标,具有较高的拦截精度,按照变结构控制的理论方法,选取制导方程的误差作为滑动模态S

目的是使误差η很快趋于零,S可以通过导弹产生的过载改变θm从而改变使之为零[7],从而保证制导精度。
选取自适应滑模趋近律[10-11]为

其中,k和ε均为大于零的常数,且k为整数。其物理意义是,当R较大时,适当放慢趋近滑模的速率;而当R→0,使趋近速率迅速增加,确保视线角速率不发散,从而令导弹具有很高的拦截精度。对趋近律进行自适应调节可以有效地削弱绕滑模的抖动。
式(11)对时间求导得


将上式代入式(14)可得

整理可得

在实际应用中,无法得到aT和的精确值,因此得到容易实现的自适应变结构制导律形式为

由式(17)可以看出,变结构强度项ε的选取直接影响到制导律的性能,如果选的太小,则不能完全抑制目标机动干扰,脱靶量较大,若取值过大,则抖动相当严重,不利于导弹飞行控制。
下面用Lyapunov函数的方法讨论制导系统的稳定性条件。选择Lyapunov函数为

则有

根据 Lyapunov稳定性定理,要使制导律收敛,Lyapunov函数的倒数必须小于零,即必须使<0。显然,当时,有Lyapunov函数收敛,证明制导回路是稳定的。
同理,对侧向平面也可以推导得到导弹的自适应变结构制导律为

其中:R1=Rcos qy,ε1为大于零的常数。
式(17)和式(20)中含有开关函数项,如果控制结构的切换具有理想的开关特性,则能在切换面上形成理想的滑动模态,但是在实际工程中,由于存在时间上的延迟和空间上的滞后等原因,使得滑动模态成抖振形式,在光滑的滑动面上叠加了抖振。为了消弱抖动,采用准滑动模态控制原理,用饱和函数sat(S)代替控制量中的符号函数sgn(S),在边界层外采用正常的滑模控制,在边界层采用连续状态反馈控制,旨在削弱或避免抖振的影响。具体形式为

其中,Δ称为“边界层”。如果边界层的厚度选得足够小,那么,制导系统能够保持高鲁棒性。
3 仿真研究
取文献[1]中螺旋机动弹道为拦截目标,其弹道如图2所示。

图2 目标螺旋机动弹道Fig.2 The trajectory of spiraling ballistic missile
本部分通过数字仿真实验来检验提出的制导律的性能,并在相同末制导初始条件下与比例导引律进行比较,考察该制导律控制下导弹拦截目标的性能。
仿真初始条件:在拦截弹与目标的初始相对距离为25 km,拦截弹的初始速度为1.83 km/s,目标初始速度为2 km/s,拦截弹的初始弹道倾角和弹道偏角为45°和-15°,弹目视线倾角和视线偏角分别为45°和-10°,目标的初始弹道倾角和弹道偏角分别为-35°和-15°,选择参数k=2。仿真结果如图3~图7所示。
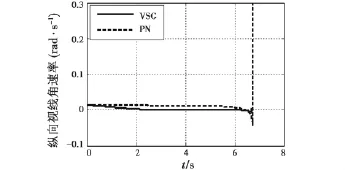
图3 纵向视线角速度的变化曲线Fig.3 Angular velocity of LOS in longitudinal plane
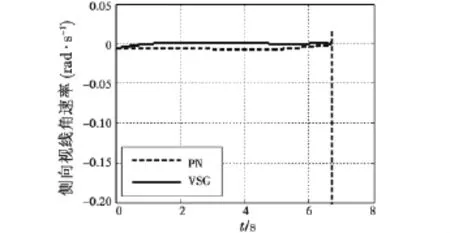
图4 侧向视线角速度变化曲线Fig.4 Angular velocity of LOS in lateral plane
图3和图4分别表示两种制导律下纵向和侧向平面内弹目视线角速率的变化情况。从图中可以看出,采用本文设计的变结构末制导律视线角速率在整个末制导过程中比较平滑,且幅值较小趋近于零,并克服了比例导引在末段视线角速率发散的情况。
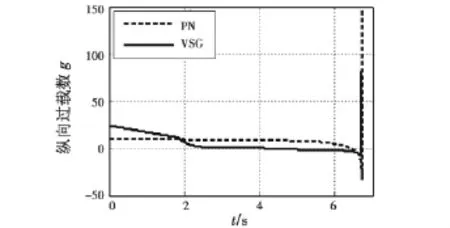
图5 纵向过载变化曲线Fig.5 Acceleration in longitudinal plane
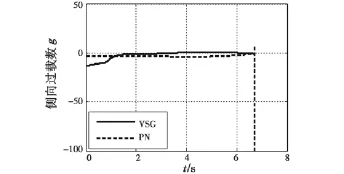
图6 侧向过载变化曲线Fig.6 Acceleration in lateral plane
图5和图6分别为两种制导律下导弹纵向过载和侧向过载的变化情况,可以看出本文提出的制导律在制导初期以较大的法向过载对拦截弹进行快速调整,然后导弹以较小的法向过载比较平稳地飞向目标,纵向过载在制导末端产生陡变,但是幅值较比例导引律小得多。这样比较符合拦截弹的实际飞行情况,因为拦截弹的飞行高度在十几千米以上的高度,海拔越高空气越稀薄,对于依靠空气动力机动的拦截弹可用过载也就越小,当可用过载小于所需的加速度指令时就会造成较大的脱靶量。
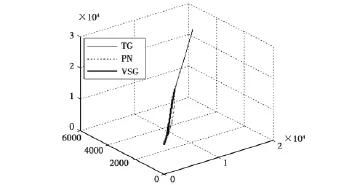
图7 导弹和目标的相对运动轨迹Fig.7 Missile-target engagement
图7是在两种制导律下在三维空间中拦截弹拦截目标的相对运动轨迹,可以看出在整个末制导阶段,本文提出的变结构末制导律拦截弹的弹道较比例导引律平滑。最后从导弹拦截目标的脱靶量比较,采用本文设计的变结构末制导律导弹最终脱靶量为0.6179 m,采用比例导引律导弹的最终脱靶量为3.8619 m,因此本文设计的变结构末制导律的脱靶量小于比例导引律产生的脱靶量,制导精度较高。
4 结论
本文在导弹与目标相对运动的非线性模型基础上,通过对预测制导方程进行分析,选择预测制导误差作为滑动模态,设计了能够拦截螺旋机动弹道目标的变结构末制导律。仿真结果表明,本文提出的制导律推导简便,对目标的螺旋机动具有较强的鲁棒性,制导精度高,具有一定的参考价值。但是,研究过程中没有考虑弹体动态特性等影响,下一步将进行深入研究。
[1]熊柯.反导导弹末制导与控制[D].长沙:国防科学技术大学,2006.
[2]李运迁,齐乃明.基于零控脱靶量的大气层内拦截弹制导律[J].宇航学报,2010,31(7):1768-1774.
[3]ZHOU Di,MU Chundi,XU Wenli.Adaptive sliding-mode guidance of a homing missile[J].Journal of Guidance,Control,and Dynamic,1999,22:589-594.
[4]ZARCHAN P.Tracking and intercepting spiraling ballistic missiles[C]//Proceedings of IEEE PLANS Conference,San Diego,CA,2000:277-284.
[5]郭建国,周凤岐,周军.基于零脱靶量设计的变结构末制导律[J].宇航学报,2005,26(2):152-155.
[6]CHADWICK W R,ZARCHAN P.Interception of spiraling ballistic missiles[C]//Proceeding of the American Control Conference,Washington,1996:4476-4483.
[7]吕长起.预测导引律及目标机动的估计[J].航空兵器,1996,3(4):65-73.
[8]SHIMA T,GOLAN O M.Exo-atmospheric guidance of an accelerating interceptor missile[C]//AIAA Guidance,Navigation and Control Conference and Exhibit,Hawaii,2008:622-637.
[9]SHARMA M,RICHARDS N D.Adaptive,integrated guidance and control for missile interceptors[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit,Rhode Island,2004:112-113.
[10]刘金琨.滑模变结构控制Matlab仿真[M].北京:清华大学出版社,2006:35-50.
[11]周荻.寻的导弹新型导引规律[M].北京:国防工业出版社,2002.
猜你喜欢
特区文学·诗(2021年6期)2021-12-22 01:02:51
装备制造技术(2020年3期)2020-12-25 05:21:52
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
金色少年(奇趣科普)(2017年11期)2017-11-28 05:41:41
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
当代贵州(2015年19期)2015-06-13 09:42:32
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
