
基于DELMIA/Robotics的白车身焊接机器人仿真应用
2012-07-04 09:42:32秦基伟章敏凤
制造业自动化 2012年11期
秦基伟,章敏凤,杨 宁
(奇瑞汽车股份有限公司,芜湖 241006)
0 引言
多年以来,白车身焊装领域,国内的绝大多数主机厂还停留在一个较低的技术水平上。焊装、总装工艺工程师最为主要的工作内容就是Excel填表和截图,文本性的工作占据了大量时间,工艺工程师很难有时间去考虑制造工艺本身的问题,如节拍、生产线布局合理性以及工位仿真等。DELMIA就是应运而生的全3D数字化制造解决方案。它能使在真实工厂或者生产过程还没有开始前,在虚拟空间中对真实工厂进行数字化仿真,并提供优化的结果。为前期项目方案制定,项目竞标,以及方案实施提供有利帮助,同时为后期示教、维护提供直观的指导。本文以奇瑞-哈工大联合开发的大负载六自由度QH-165型机器人,为应用对像,仿真S11白车身侧围的点焊过程,通过DELMIA软件中的Robotics模块对其进行焊接路径的仿真。结果表明,利用DELMIA/Robotics实现机器人仿真是方便、准确和有效的。统两大部分组成。实际焊接应用时需增加焊接控制器、焊枪以及水、气控制检测等外部设备。机器人技术参数见表1。

图1 QH-165机器人模型
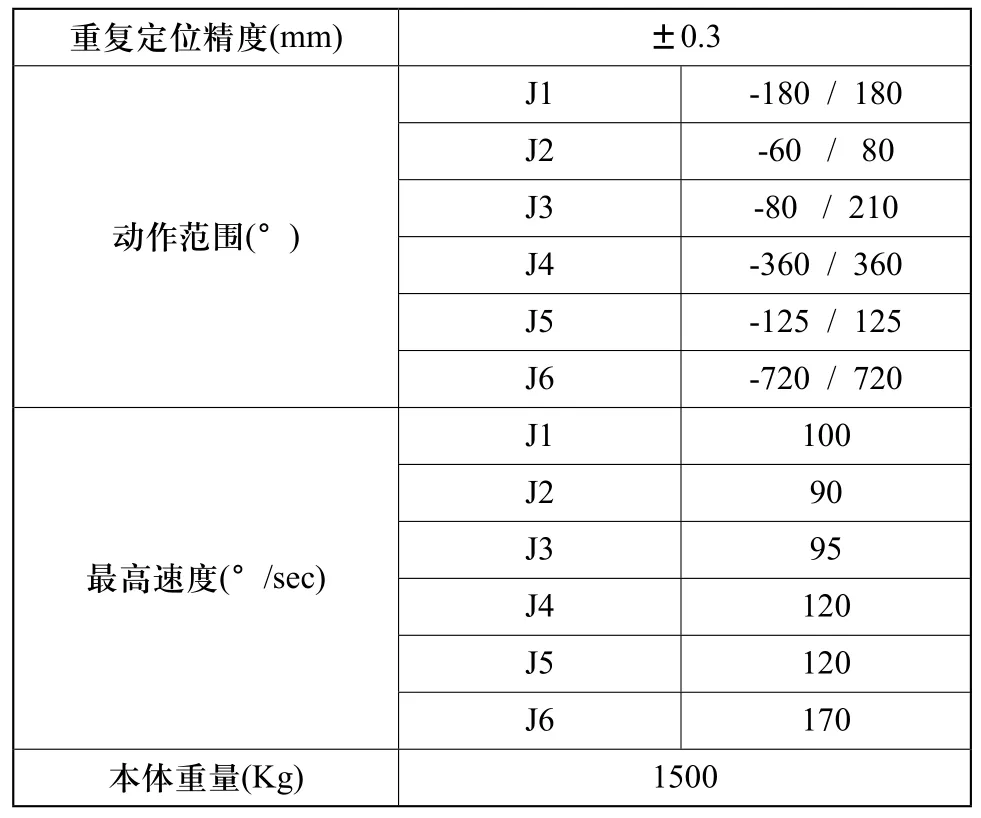
1 机器人结构及技术指标
QH-165型机器人为六轴串联机器人,其本体结构如图1所示,整个系统由机械本体和电控系
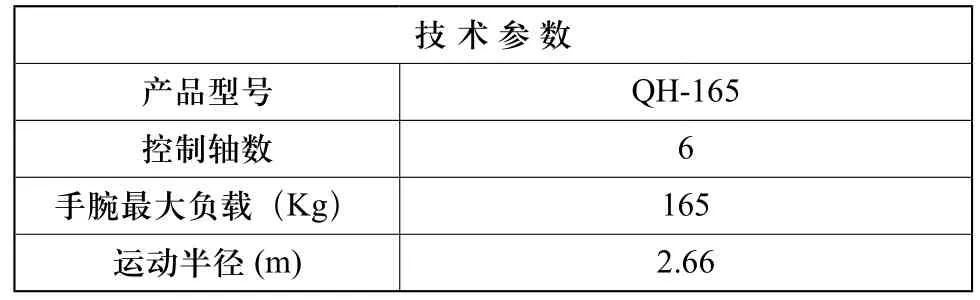
表1 机器人技术指标
续表
2 DELMIA简介
DELMIA是Dassault Systemes公 司 为“数字化工厂”概念推出的一套较完善的软件解决方案。DELMIA软件系统包括两个相互关联的独立软件,DPE
(Digital Process Engineer)与 DPM(Digital Process Manufacturing),前者为数字化工艺规划平台,它建立产品数据、资源数据和工艺结构,并将三者有效地关联在一起,实现产品分析、工艺方案评估、各种数据统计计算以及装配工艺结果的输出等;后者提供工艺细节规划和验证应用的环境,以产品、
工装的三维模型并结合DPE已设计好的工艺流程进行数字化装配过程的仿真验证,二者通过唯一的PPR Hub数据库共享数据。
由于该侧围焊接为自动化改造项目,根据工艺要求,本文重点介绍如何使用DELMIA的DPM模块来做工艺细节规划和验证工作。
3 工艺分析
车间可提供的左右侧围布局尺寸均为:15.5m×6m。根据侧围件尺寸和工艺点的数量,设计工装夹具后可放置四个工位。内、外板总成焊接由人工完成,其中外板分装件由人工搬运到第一个工位并焊接完成,内板总成在其他人工工位焊接完成后需由机器人搬运至第二个工位。整个侧围总成在机器人焊接完成后,也需由机器人搬运送至EMS小车上。主线采用PLC控制,Profibus总线通信,节拍120s。根据以上分析,最终确定设计四个工位,八台机器人,由于左右侧围对称设置,因此下文只以右侧围为例,布局如图2所示。
其中OP10为外板总成人工工位。OP20为内板总成搬运及内、外板关键工艺点自动焊接工位,A1机器人完成内板总成从B滑台搬运到OP20工位上,随后A2、A3、A4机器人完成内、外板关键点的焊接。OP30工位的三台机器人完成内、外板工艺点的补焊工作。OP40工位的一台机器人实现焊接完成后的侧围总成搬运到EMS小车上的功能。至此整个右侧围总成焊接工作完成。
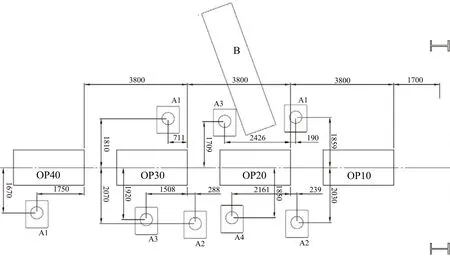
图2 右侧围布局
4 细节仿真
4.1 焊钳选型
根据每台机器人分配的焊点,利用DPM中的TSA工具制作出供厂家制作焊钳用的数模文件,当厂家的焊钳设计完成后,亦可用此方法验证该焊钳与工件和工装之间是否有干涉,最终完成焊钳选型。
4.2 机器人位置布局
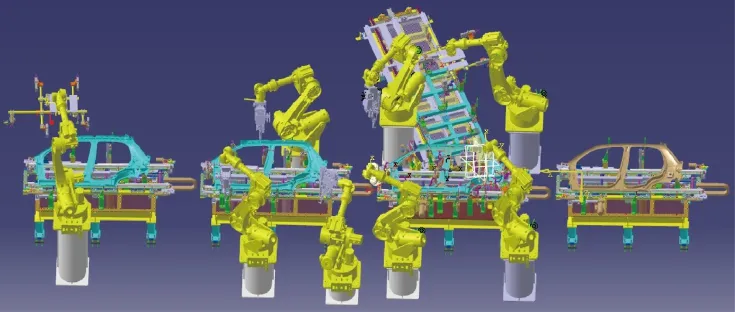
图3 完整工位布局
机器人放置位置不仅影响机器人的可达性,更关系到机器人及末端工具与工装、工件,机器人与机器人之间的干涉问题,合理的位置可以有效减少甚至避免干涉问题。DELMIA中Auto Place工具可以方便的找出机器人的摆放位置和高度。最终机器人布局如图3所示。完成以上工作后将制作有运动机构的焊钳用Set Tool工具装配到机器人末端即可进行机器人示教仿真工作。
4.3 机器人示教
机器人的示教和轨迹优化是DELMIA的又一个亮点,它能够真实的模拟机器人的运动姿态。利用Teach a device命令,选择要示教的机器人,即可调出机器人示教窗口,如图4所示,在此窗口中可以方便的插入/删除轨迹点、修改位姿、增加焊接动作、IO设置以及调整焊接工序等等。通常机器人示教完成后,其运动轨迹与实际是相差比较大,经常出现某个轴旋转360度的现象,因此我们需要对其轨迹进行优化,使其与现实相符。自动轨迹优化命令:Set TurnNumbers,如图5所示,在该窗口中可以选择最小旋转角度(ShortestAngle)模式进行优化,优化完成后即可按照优化后的轨迹运行。
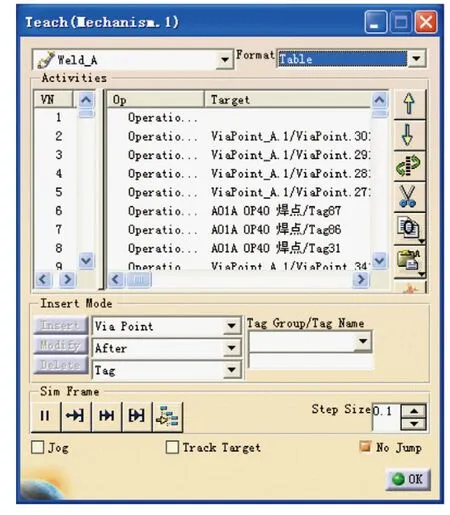
图4 机器人示教窗口
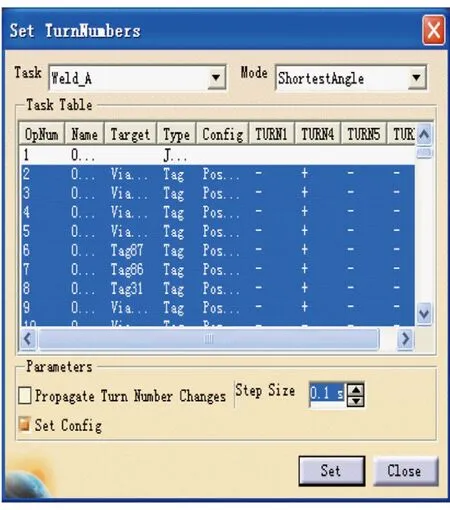
图5 机器人轨迹优化
4.4 干涉区
干涉区简单的说就是运动设备之间可能发生碰撞的一个空间区域。避免设备之间发生碰撞的方法通常是在干涉区域内同时只允许一台设备作业,这种避免方法也有二种,一是时间干涉,二是空间干涉。时间干涉法由于浪费大量时间而很少使用,特别是在庞大系统中;空间干涉是将有可能出现干涉的区域划分出来,该空间内同时也只有一台设备可以申请作业,进入干涉区域后该设备主动发出区域锁定信号限制其他设备进入,当设备离开干涉区域后发出释放信号。由于空间干涉法控制方便而被广泛采用。DELMIA中提供的空间干涉法Clash可以在设备安装调试之前就可以准确的找到所有干涉区域,能够大大缩短调试时间。
5 结论
通过理论设计与实现应用我们发现在计算机中应用DELMIA仿真的所有数据可以准确的反应现实状况,更为调试提供了积极的指导作用,实际焊接的样件通过三坐标检测和破检验证全部合格,焊点一致性和质量远高于人工生产的产品。
[1] 户燕会.工业机器人的工作空间和误差补偿的分析与仿真[D].河南: 河南理工大学, 2010.
[2] 达索.工业机器人仿真培训资料[Z].法国达索公司, 2009 .
[3] 崔茂源 .基于虚拟现实技术与监控理论的机器人示教系统研究[D] .长春:吉林大学 ,2004 .
[4] 刘荣 译 .机器人探索[M] .电子工业出版社 .2003 .
猜你喜欢
中国新闻周刊(2023年42期)2023-12-03 14:39:41
湘潮(上半月)(2023年5期)2023-06-14 05:42:42
物流技术与应用(2020年5期)2020-06-25 02:48:12
意林(2020年10期)2020-06-01 07:26:37
模具制造(2019年10期)2020-01-06 09:13:02
模具制造(2019年10期)2020-01-06 09:13:00
模具制造(2019年4期)2019-06-24 03:36:42
汽车实用技术(2019年3期)2019-03-05 04:01:12
现代制造技术与装备(2015年4期)2015-12-23 10:20:20
杭州(2015年9期)2015-12-21 02:51:49
