
基于OPC技术与自适应遗传PID控制方法在PCS中的应用
2012-07-04 09:42:40敖茂尧
制造业自动化 2012年11期
敖茂尧
(广西职业技术学院 机械与汽车技术系,南宁 530226)
0 引言
随着工业过程控制的智能化发展,神经网络算法、遗传算法等复杂控制器的应用,已成为当前工业过程控制的发展趋势。PLC是过程控制系统中最常用的控制器,由于PLC 编程语言的局限性,已满足不了工控发展对复杂控制算法的需求,然而MATLAB具有强大的工程计算能力,能够实现各种复杂的智能控制算法,但是不能与现场工控设备直接数据通信。因此,如何使MATLAB 与PLC 相结合,实现两者的优势互补是当今自控领域研究的热门话题。OPC一种工业标准,用于过程控制和制造自动化系统。作为一种组件模型接口能够为工业应用程序之间提供高效的信息集成和交互功能。OPC技术的出现为实现MATLAB与PLC之间进行通讯提供了公用的接口,因此本文提出一种基于OPC技术与MATLAB的遗传算法PID控制方法,并在液位过程控制系统进行应用。
1 控制系统设计
1.1 系统整体结构设计
本文基于OPC技术,设计并实现了MATLAB与MCGS之间数据的实时传递和系统的无缝集成[1],为检验所设计的智能控制算法性能提供了一条有效的途径,本系统西门子PLC对现场设备数据进行采集,通过现场总线建立MCGS与PLC的通讯。作为OPC服务器的组态软件MCGS(上位机)为数据总控平台,以MATLAB为OPC客户端,进行遗传算法PID设计、实时控制和控制结果分析等。MATLAB与MCGS实现智能过程控制的系统结构,如图1所示。

图1 系统整体结构
MATLAB在整个控制系统有两个作用,分别通过M文件和Simulink实现。在M文件中主要实现连接和断开OPC服务器,及添加所需读取和写入变量的项,并将OPC服务器采集的历史数据保存在数据库中;编写自适应遗传算法的M文件,并封装在S函数中。在Simulink中主要调用M文件编写的S函数以实现遗传PID控制算法、实时读取和写入数据以及可视化的图形界面。在Simulink上实时控制系统主要包括三个部分:S函数、funread函数、funwrite 函数,MATLAB控制流程图如图2所示。
1.2 基于OPC的MATLAB与MCGS的实时通讯

图2 Malab控制流程图
MCGS全面支持OPC标准,既可作为OPC客户端也可以作为OPC服务器,充当服务器时不需要进行专门的设置。MATLAB9.0集成了OPCToolbox工具包,利用此工具包MATLAB可以实现与 OPC服务器的连接并读取 OPC 服务器中的相应变量的值。基于此,我们利用MATLAB中的 OPC 工具包来实现MATLAB 与 MCGS 的 OPC 服务器的连接,以下给出了在MATLAB 软件中利用 OPC 技术读取MCGS控制平台中实时变量的程序编写步骤。MATLAB 与MCGS之间实现 OPC 通讯的具体步骤如下所示:1)在 MATLAB中输入命令“opcregister”安装OPC核心组件;2)在 MATLAB中输入命令“opcserverinfo”获得主机名和ID;3)编写M 文件。
1.3 基于OPC的Simulink自适应遗传PID整定设计
采用遗传算法在线整定PID,就是针对每个采样时间实现PID控制参数的遗传算法优化,在采样时间k,选取足够多的个体,计算不同个体的自适应度,通过遗传算法的优化,选择自适应度大的个体所对应的PD控制参数作为该采样时间下PD的控制参数。为获得满意的过度过程动态特性,并防止产生超调,采用误差绝对值、误差和误差变化率的加权及作为第k个采样时间时i个个体的参数选择最小目标函数[2]。本文在网络控制系统中,建立Simulink与OPC服务器的通讯,获取PID控制模块的Kp、Ki、Kd参数,在Simulink运行遗传PID算法,将优化后的PID参数通过OPC接口传把遗传PID算法求出的参数写入控制系统的PID模块中,实现在线遗传算法控制[3]。
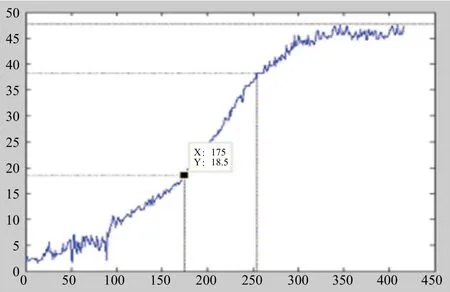
图3 双容水箱控制系统阶跃响应曲线
2 PCS 系统的自适应遗传PID整定应用
2.1 典型过程控制系统的系统辨识
本例选取的双容水箱控制系统为典型二阶延迟系统,为获得该系统的数学模型,采用MATLAB获取阶跃响应曲线。传递函数为:
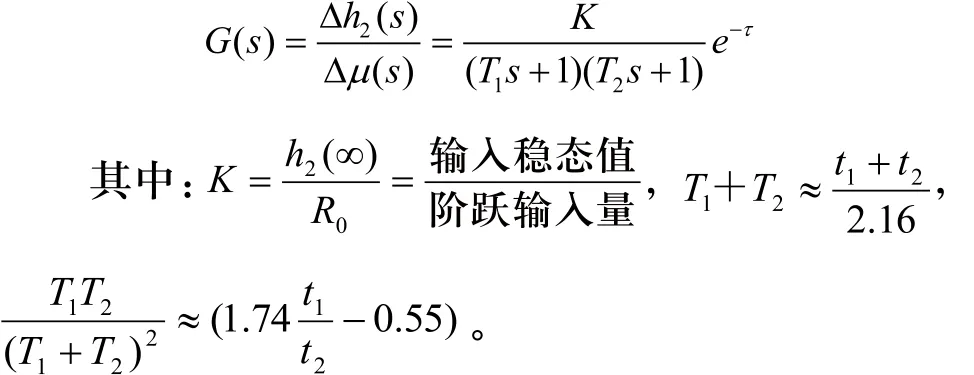
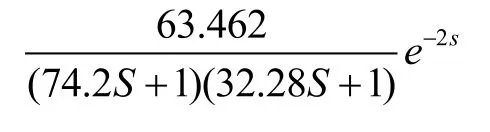
启动OPCtoolbox建立与OPC服务器的通讯连接。在Group1和Group2中分别添加一、二级水箱液位变量a1,a2,并采用异步方式读取数据,更新速率为0.5 秒,记录600次,采样时间为300秒,并实时保存数据到数据库中。采样结束后根据数据库中的历史数据,绘制阶跃响应曲线如图3所示,最后根据上述方法进行分析获得该系统数学模型为:
2.2 典型过程控制系统的遗传自适应PID整定

图4 自适应遗传PID控制效果图
本例先采用ZN进行整定,整定参数为[P=0.13,I=0.04,D=1.2],后利用设计的自适应遗传PID进行整定,两种控制效果如图4所示,可见采用自适应遗传算法PID控制,系统的超调量更小,快速性明显提高,调节时间缩短,从而提高了系统的动态性能。非常适合于对实时性要求极高的实际生产过程控制,是一种高效的寻优方法。
3 结束语
本文从工业过程控制出发,构建了基于OPC技术的MATLAB与PLC的通信,利用MATLAB强大的工程计算功能以及Simulink的OPCtool工具箱实现了对工业过程控制系统的自适应遗传PID整定,取得了理想的效果。为智能化网络控制发展提供可靠的理论与实验依据。
[1] 张烈平, 牛秦洲, 敖茂尧.基于OPC的MATLAB与MCGS实时通讯的实现[J].微计算机信息, 2007, 23(2-1), 54-55.
[2] 敖茂尧, 张烈平, 曾爱群.基于OPC技术的模糊控制器研究和实现[J].自动化与仪表, 2007, 5.
[3] 刘金琨.先进PID控制及其MATLAB仿真[M].北京: 电子工业出版社, 2003: 130-145.
猜你喜欢
茶叶通讯(2022年2期)2022-11-15 08:53:56
茶叶通讯(2022年3期)2022-11-11 08:43:50
机械研究与应用(2022年4期)2022-09-15 02:17:04
飞控与探测(2022年6期)2022-03-20 02:16:14
力学学报(2020年4期)2020-08-11 02:32:12
制造技术与机床(2017年6期)2018-01-19 02:41:07
黑龙江电力(2017年1期)2017-05-17 04:25:08
中国科技信息(2016年19期)2016-10-25 08:17:29
电源技术(2015年9期)2015-06-05 09:36:06
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
