
基于无线传感节点的自卸车车斗防挂预警器设计
2012-07-04 09:43:12夏小东李宝林
制造业自动化 2012年15期
夏小东,李宝林,杨 熙
(1.中国矿业大学 机电工程学院,徐州 221008;2.中国石油大学(华东) 机电工程学院,青岛 257061)
0 引言
随着我国经济的发展,全国各地硬件设施建设迅速,自卸车的数量也越来越多。自卸车作为运输工具,车斗举升卸货时,其整体高度就会上升,由于驾驶员的驾驶疏忽,而导致车斗在举升或举升后的卸货过程中经常挂断电线或电缆等,导致经济损失。因此,设计一种能够实时监测车斗附近障碍物距离的装置有一定的应用价值。
1 总体设计思路[1,2]
由于车斗需要运动,所以常规的有线采集不太方便,因此,采用了无线传感节点的方式来实现对数据的采集。利用超声波传感器采集自卸车车斗斜前方、上方及斜后方的障碍物距离车斗的距离,单片机ATmega16通过射频芯片nRF24L01传到驾驶室。信息采集节点设计原理图如图1所示。

图1 信息采集节点设计原理图
信息处理节点上的单片机通过nRF24L01接受采集的信息,并对采集的数据进行处理,计算出障碍物到车斗的垂直距离,并与车斗举升后的最大高度进行比较,然后将结果实时显示在驾驶室的液晶屏上,同时发出语音报警,为驾驶员提供操作信息,达到预警防挂的目的。信息处理节点设计原理图如图2所示。

图2 信息处理节点设计原理图
由于自卸车常常作业在雷雨天和施工现场,所以节点的设计需要防水防雷防尘。因此在需要选择防水型超声波传感器,外壳的选择了密闭的不锈钢金属外壳。
2 硬件设计
2.1 电源设计
由于采集节点上的超声波传感器和单片机都需要5V电源,而基准电压芯片REF192和射频芯片nRF24L01都需要3.3V电源,外接电源为6V,所以必须经过电压转换,采用ASM1117-3.3V和ASM1117-5V的稳压芯片,转换电路图如图3所示。

图3 3.3V电压转换原理图
在得到3.3V和5V电压后,又分别连接上了一个滤波电路,供给单片机、传感器和nRF24L01等。
2.2 信息采集节点设计[3]
超声波传感器选择的是深圳市电应普科技有限公司的DYP-ME007Y-PWM超声波模块,可提供30cm-3.5m的非接触式距离测量功能,在感应范围内感应到物体则输出对应的高电平脉宽信号。将传感器模块的上的VCC、Echo(接收端)、Trig(控制端)、GND引脚分别接到接节点上的5V电源、单片机 PA0(PA1, PA2)、PB1(PB1, PB2)、GND 上。
采集节点上还接有电源开关,晶振电路电源指示灯,信号传输指示灯,当射频芯片开始工作时,单片机控制PB1引脚上的LED灯等闪烁。节点上各部件的连接如图4所示。

图4 采集节点总体接口图
无线芯片采用的是是挪威Nordic Semiconductor公司推出的一款低功耗的单片射频收发器nRF24L01。最高传输速率达到2Mbps,支持多点间通信,自带有功率放大器、频率合成器、晶振、调制器等模块,并带有增强型ShockBurst控制器,其中输出功率和通信频道和协议都可通过程序进行配置。其外围只需要接少量的电容进行滤波处理即可,外围电路图如图4所示。由于只需要几米的传输距离,所以选择了PCB天线,如图5所示。

图5 NRF24L01外围电路原理图
2.3 信息处理节点设计

图6 语音提示电路图
处理节点主要由液晶显示屏、语音报警模块、ATmega16单片机、nRF24L01、电源以及外壳等组成。采用单片机的PA口控制LCM12864显示处理后的距离。为了适应不同的自卸车,加上了键盘控制部分,采用PD口进行控制,PD3是数字加功能键,PD4是数字减功能键,通过这两个口分别对距离的极限值进行设置。
语音提示部分采用应用广泛的WT588D-16可编辑语音芯片,该芯片功能多,音质好,且具有MP3控制模式、按键控制模式等较多控制模式,可控制的语音地址位达到220个,每个地址位能加载128段语音,使用时,只需要通过单片机访问地址就可以实现语音播放[4]。语音提示电路如图6所示。
3 软件设计
软件开发采用ICCAVR软件开发环境,使用C语言模块化编程。软件部分包括采集节点程序设计、信息处理节点程序设计。流程图如图7和图8所示。

图7 信息采集节点程序流程图
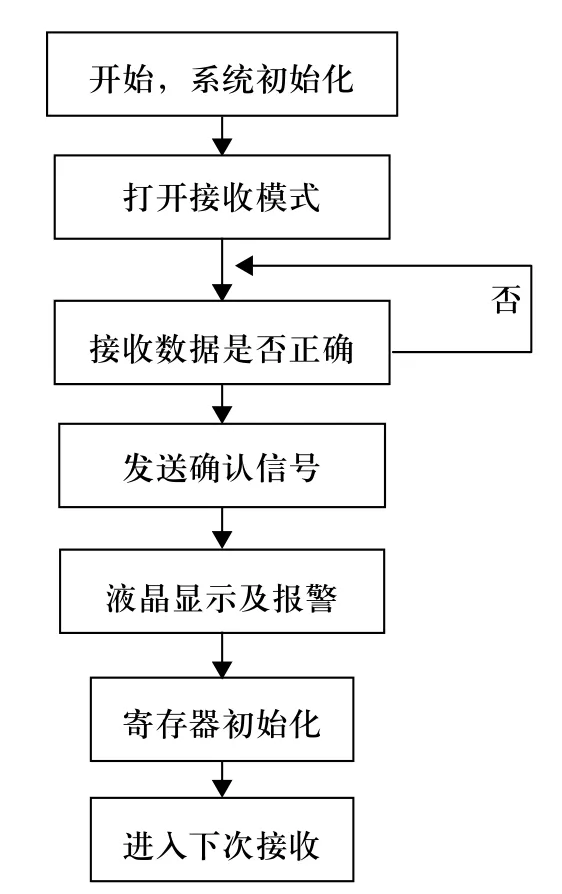
图8 信息处理节点程序流程图
4 算法设计及实验分析
4.1 算法设计
超声波传感器是通过计算从发出超声波信号到接收到返回的信号所用的时间,来得出障碍物的距离。距离计算公式为:

其中:d为障碍物距离,s为声波来回的路程,c为声速,t为声波来回时间[5]。
三个超声波传感器的测量方向分别为车斗正上方,斜前方45°,斜后方45°。自卸车在行驶或倒车时,首先由斜前方或者斜后方的传感器先测出障碍物的距离或,并通过=d×sinπ/4计算得出其垂直高度d 1'和,然后有正上方的传感器测出停车卸货时,车斗上方的障碍物距离并将结果与车斗举升后的最大高度进行比较,、和中的任何一个小于都会发出声光报警,测得的数据会自动保存,直到测到下一个障碍物。
4.2 实验分析
在实验室中,将信息采集节点放在地面上,并开始采集信息。拖动一跟5mm左右粗的电线,从节点左侧3m处往节点右侧3m处拖动,高度分别取为0.5m、1.0m、1.5m、2.0m,每移动2m记录一次数据。传感器测得的数据如表1所示。

表1 实验测量数据表(单位:cm)
由上表的数据可以看出,误差率都不超过3%,而且测得的数据比较稳定,实验是成功的。
5 结论
介绍了一种基于nRF24L01的无线超声波传感器节点的自卸车车斗防挂预警装置,并对软硬件进行了设计。并进行了实际验证,结果表明该装置能够较好的达到自卸车车斗防挂预警的作用,且有安装方便、工作稳定、成本低等优点。
[1] 杨玲, 郝成.基于NRF24L01球磨机信号无线采集的实现[J].传感器世界, 2009(9): 23~25.
[2] 唐颖, 张凡, 郭勇.移动机器人的超声波测距传感器设计[J].传感技术学报, 2010(11): 1647~1649.
[3] 潘勇, 管学奎, 赵瑞.基于NRF24L01的智能无线温度测量系统设计[J].天津理工大学学报, 2008(12): 48~50.
[4] 高月华.基于超声波汽车倒车雷达预警系统设计[J].压电与声光, 2011(6): 429~435.
[5] 章小兵, 宋爱国, 唐鸿儒.一种基于多超声波传感器定位的新方法[J].制造业自动化, 2006.28(1): 29-32.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02 09:36:22
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
科学咨询(2020年53期)2020-03-19 07:41:46
铁道通信信号(2020年9期)2020-02-06 09:15:54
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
专用汽车(2015年2期)2015-03-01 04:07:17
汽车维护与修理(2015年1期)2015-02-28 12:15:22
筑路机械与施工机械化(2014年7期)2014-03-01 03:00:27
城市道桥与防洪(2014年5期)2014-02-27 07:26:44
