
小电感无刷直流电机不同驱动结构下的控制特性及功耗比较
2012-07-02 10:45:00武俊峰
电工技术学报 2012年8期
武俊峰
(中国科学院长春光学精密机械与物理研究所应用光学国家重点实验室 长春 130033)
1 引言
随着永磁电机的发展,无刷直流电机在电力系统中的应用受到越来越多的关注,包括无刷电机控制系统设计、无刷电机伺服系统的系统稳定性、驱动结构和功率效率等。而在伺服应用中,由于要求系统的响应快,在这种场合下的无刷直流电机的电感值一般都比较小。针对该种无刷电机的驱动结构,从降低结构的复杂度考虑,可以采用以 Buck电路为主的半桥驱动结构[1,2],但在这种驱动结构下,每拍只有一相绕组导通,故绕组利用率低。而从提高效率考虑,多采用全桥驱动结构[3]。在全桥结构下,文献[4-8]从转矩脉动角度分析了无刷直流发电机在PWM控制模式下的脉动特性,文献[9-10]中张晓峰等人进一步从转矩脉动角度出发,针对全桥结构的Buck电路,分析了全桥结构下采用Buck电路实现的 PAM 驱动方式对电机转矩脉动的影响。本文在以上基础上从控制特性和机械特性角度出发,进一步分析了具有小电感量的无刷电机系统在PWM和PAM驱动结构下的控制特性和对功耗的影响。阐明了针对全桥结构而言,在 PWM的驱动方式下,控制特性具有较强的非线性特征,并且在低速时具有等效力矩大,高速时等效力矩小的特点,容易产生系统振荡行为,故在采用 PWM控制时在调速范围不同时,应采用不同的比例系数;而在 PAM 驱动方式下,等效力矩相同,占空比和转速成正比,控制特性具有较好的线性特性,同时电流平滑,涡流损耗减小,具有功耗低的特点,但相对地增加了系统的复杂性。最后通过实验验证了分析的正确性。
2 PAM与PWM控制特性比较
2.1 PWM斩波方式下电流脉动及调速特性
全桥下的 PWM斩波方式是指通过对电机桥臂斩波的方式对电机进行控制,又称为脉宽调制方式。这种全桥驱动结构下,每拍有两相绕组导通,绕组利用率得到提高。其电路结构图如图1所示,其中U0为母线端电压。母线电压恒定,是通过控制MOS管的栅极占空比来实现控制转速的目的。

图1 全桥PWM控制电路示意图Fig.1 Full bridge PWM control circuit diagram
设脉宽调制周期为 T,一周内高电平持续时间为t1,低电平持续时间为t2,由于T远远小于电机的机电时间常数,在每一个周期T内可认为转速不变。考虑电流在正方向连续变化的情况,系统的电流波形如图2所示。
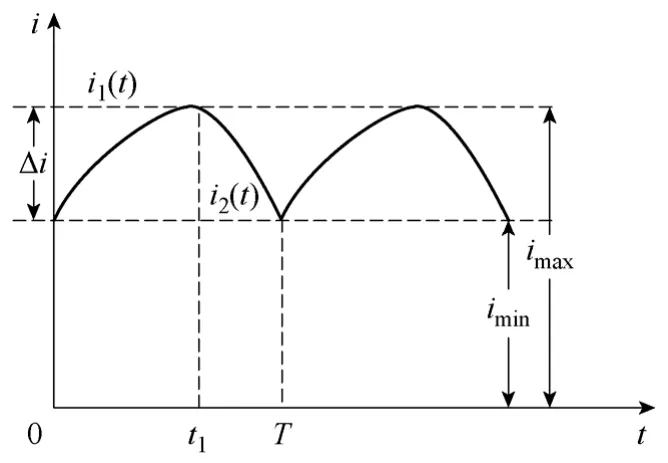
图2 一周期内电流波形示意图Fig.2 Current curve within one period
一个周期内两段电压平衡方程为


式中1i——第一段的电流;
i2——第二段的电流;
U——绕组两端电压;
L——绕组电感量;
E——反电动势;
R——绕组阻值。
稳态时第一段的终值等于第二段的初值,第二段的终值又是第一段的初值。在这样的初值条件下,方程的解为
式中 I1——平均负载电流, I1= (U - E )/R ;
I2——电枢回路短接时的平均制动电流,
ist——堵转电流或启动电流,st/i U R= ;
Te——电枢回路电磁时间常数,e/T L R= 。电枢电流脉动的最大值和最小值分别为

上面两式相减,得电流脉动量为
式中,τ为脉宽调制占空比,1/tTτ=。
式(7)表明电流脉动量随占空比而变化,且与转速无关。根据式(7)可画出斩波频率在25kHz、75kHz、150kHz下的电流脉动量,电流脉动量随占空比变化的波形如图 3所示。斩波频率分别为25kHz、75kHz、150kHz,其中斜线为电机的稳速下平均电流。

图3 电流脉动量随占空比变化的波形图Fig.3 Current ripple vs duty cycle variety curve
可以看到,即使在 150kHz的斩波频率下,仍有75%以上的范围内电机工作状态为电流不连续状态。25kHz斩波频率下的实测电流波形如图4所示。
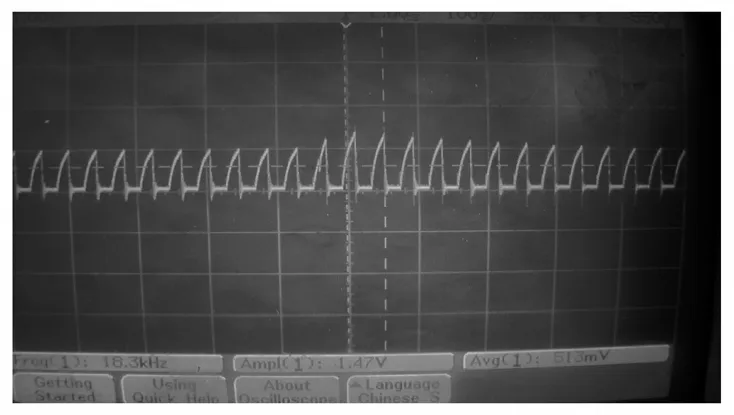
图4 电流不连续状态实测图Fig.4 Experimental discontinuous current curve
此时电流呈现锯齿状,符合图2的电流波动示意图的说明。且在功率管的关断时间断内,电流大部分为零,主要原因是电机的小电感特性引起的。
由于小电感特征,使得电流呈现出不连续,故将电流的连续段和不连续段分开考虑,电流连续段的电压平衡方程为

而当t1< t≤ t1+t2时,i=0,回路不通,因此

式中 v——相对转速,/E Uν=。
则平均电流为

式中 τ——脉冲调制占空比,1/tTτ=。
平均功率为

平均电磁功率为

式中 Pst——堵转功率,2st/P U R= 。
平均电磁力矩为

式中 Tst——堵转力矩,Tst=Ktist。
为了方便处理,将平均电磁力矩归一化处理,则相对电磁力矩为,从而有

由此得到无刷直流电机在脉宽调制工作状态下的机械特性和调速特性如图5、图6所示。
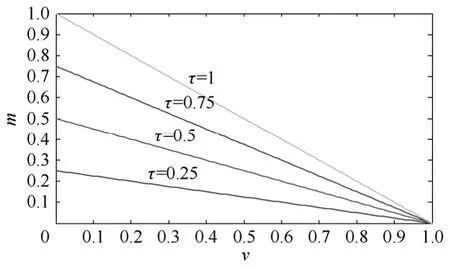
图5 脉宽调制下机械特性Fig.5 Mechanical characteristic under PWM mode

图6 脉宽调制下调速特性Fig.6 Speed regulation characteristic under PWM mode
即动态力矩放大倍数与转速有关,意味着在不同转速下,同样的占空比增量会产生不同的力矩增量。低速时动态放大倍数大,即当量脉宽产生的力矩大,由于这种影响有时使电机控制系统在低速时出现振荡现象、稳态误差增大现象等。这种 PMW调制特性说明,高低速下系统应该采用不同的比例系数。
2.2 PAM调压调速方式
PAM 斩波方式是通过对电机母线电压进行控制,又称为脉宽调幅调制方式。
调压调速方式下,设 α= U/ U0,表示电机母线电压 U和电机额定电压 U0之比,可以得到相似的一组方程

其机械特性和调速特性如图7和图8所示。
调压调速方式下动态力矩放大倍数与转速无关,意味着在不同转速下,同样的占空比增量会产生相同的力矩增量。这种调制特性线性度好,高低速下,系统特性一致。

图7 调压调速下机械特性Fig.7 Mechanical characteristic under PAM mode

图8 调压调速下调速特性Fig.8 Speed regulation characteristic under PAM mode
2.3 PAM调压调速方式实现
全桥下PAM方式的实现采用Buck电路的方式实现,电路图如图9所示,通过控制T7的占空比达到调节母线端电压的目的,从而控制转速。
类似上诉PWM方式下的电流波动分析。在输入输出不变的前提下,当 MOS管导通时,电感电流线性上升,其增量为

图9 全桥下PAM驱动电路示意图Fig.9 Full bridge PAM drive circuit diagram

式中 ΔiL——电感电流脉动量;
Vin—— 电源电压,为28V;
τ—— 占空比;
f—— 斩波频率;
L—— 滤波电感。
从而保证电流连续的的电感量为[9]

在电感量为2.5mH,斩波频率为24kHz的情况下,系统的稳态量和脉动量随占空比的变化如图10所示,可以看到此时电流连续。通过加入滤波电容旁路脉动量进一步减小电枢回路上的电流脉动分量。
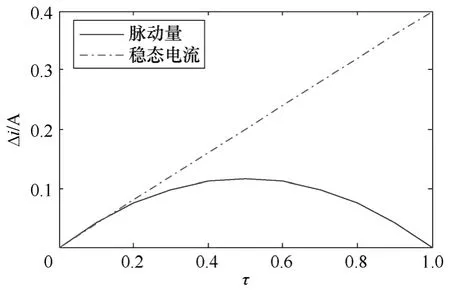
图10 稳态电流-电流脉动量随占空比变化Fig.10 Steady state current and current ripple vs duty cycle variety curve
当脉动电流流经电容时,产生的纹波电压为

取纹波电压为0.002V,在ΔiL=0.1A,s1/T f= =s的条件下,滤波电容值为260μF,保留一定裕量,采用的滤波电容值为470μF。
3 实验结果
该控制系统采用基于FPGA的硬件结构,不需要任何硬件的修改,只需对FPGA的控制逻辑进行重新编程就可以进行无刷直流电机在PWM和PAM驱动方式下的测试实验。实验条件为50~60Pa真空条件,以消除环境影响。电机采用卫星姿态控制用高精度无刷直流电机,系统28V供电,单相绕组阻值0.35Ω,单相绕组电感为0.05mH,轴系阻尼系数0.000 096N·m/rad。逆变器开关管采用IRF540,前级MOS管驱动采用IR2136及IR2121。脉宽调制下调速特性和调压调速下调速特性实验结果如图11、图12所示。实验结果和理论分析吻合,从而验证了采用PAM驱动结构的正确性。可以看到PAM方式下无刷直流电机具有调制特性线性度好,高低速系统特性一致的优点。
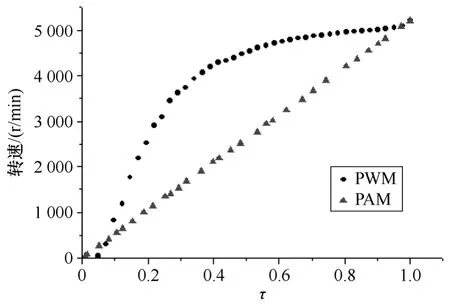
图11 PAM与PWM调速特性实测曲线Fig.11 Experimental speed regulation characteristic under PAM and PWM mode
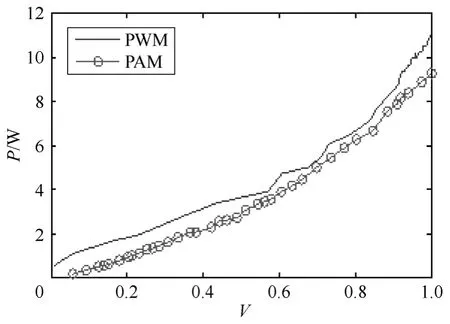
图12 PWM方式与PAM功耗比较Fig.12 Power consumption comparison under PWM and PAM mode
4 结论
由实验结果可以看出:对于电感值较小的无刷直流电机而言,电机在PWM和PAM脉宽调制方式下,具有如下特点:
(1)在PWM方式下,电机运行于电流不连续状态,不连续的电流会在电机中形成涡流损耗,从而增加电机的功耗,另外 PWM方式会增加功率管功耗。PWM方式与PAM调压调速功耗比较如图12所示,PWM方式的平均功耗为7.8W,调压调速方式下的平均功耗为3.9W,由于涡流损耗产生的平均损耗为3.9W。
(2)PWM 方式下,其控制特性也呈现出非线性,即同样的占空比增量在高低速下产生的力矩增量是不同的,在电机控制系统参数调试过程中这是值得注意的。如图11所示,随着占空比的增加,电机的转速很快进入非线性(即在30%的占空比调节范围控制着电机转速的 80%),在调速应用时应注意电机选型时应留有一定范围的转速余量。
(3)值得注意的是,全桥结构下PWM驱动结构虽然具有结构简单的特点,但控制系统设计应该考虑控制特性的非线性,在不同转速下采用不同的比例系数。而 PAM 的全桥式驱动虽然具有较好的线性,但结构相对复杂。设计时应权衡考虑。
[1]程颢. 飞轮控制系统研究与设计[D]. 哈尔滨:哈尔滨工业大学, 2009.
[2]卢靖华, 陈小. 大惯量飞轮电机的制动控制[J]. 微特电机, 1995, 10(5)∶ 30-33.Lu Jinghua, Chen Xiao. The braking mode control of the large momentum flywheel motor[J]. Small &Special Electrical Machines, 1995, 10(5)∶ 30-33.
[3]张存山, 范瑜. 考虑 IGBT 特性的无刷直流电机数学模型[J]. 电工技术学报, 2005, 20(7)∶ 21-27.Zhang Cunshan, Fan Yu. Mathematical model ofbrushless DC motors taking into account IGBT-characteristics[J]. Transactions of China Electrotechnical Society, 2005, 20(7)∶ 21-27.
[4]揭贵生, 马伟明. 考虑换相时无刷直流电机脉宽调制方法研究[J]. 电工技术学报, 2006, 20(9)∶ 66-71.Jie Guisheng, Ma Weiming. Research on thepulsewidth modulation methods of brushless DC motor taking consideration of commutation[J]. Transactions of China Electrotechnical Society, 2006, 20(9):66-71.
[5]周波, 窦森, 严仰光. 电子变换器调压的无刷直流发电机 PWM 控制模式及其对电压脉动的影响[J].中国电机工程学报, 2001, 21(7)∶ 56-60.Zhou Bo, Dou Sen, Yan Yangguang. PWM control modes their influence on voltage fluctuation for the brushless DC generators based on electronic converter[J].Proceedings of the CSEE, 2001, 21(7)∶ 56-60.
[6]张相军, 陈伯时. 无刷直流电机控制系统中 PWM调制方式对换相转矩脉动的影响[J]. 电机与控制学报, 2003, 7(2)∶ 87-91.Zhang Xiangjun, Chen Boshi. The different influences of four PWM modes on commutation torque ripples in brushless DC motor control system[J]. Electric Machines and Control, 2003, 7(2)∶ 87-91.
[7]林平, 韦昆, 张仲超. 新型无刷直流电机换相转矩脉动的抑制控制方法[J]. 中国电机工程学报, 2005,26(3)∶ 153-158.Lin Ping, Wei Kun, Zhang Zhongchao. A novel control scheme to suppress the commutation torqueripple in BLDCM [J]. Proceedings of the CSEE, 2005, 26(3)∶153-158.
[8]Liu Yong, Zhu Z Q, David Howe. Direct torquecontrol of brushless DC drives with reduced torqueripplep[J].IEEE Transactions on Industry Applications, 2005,41(2)∶ 599-608.
[9]张晓峰, 胡庆波, 吕征宇. 基于 BUCK 变换器的无刷直流电机转矩脉动抑制方法[J]. 电工技术学报,2005, 20(9)∶ 72-76.Zhang Xiaofeng, Hu Qingbo, Lü Zhengyu. Torque ripple reduction in brushless DC motor drives using a Buck converter[J]. Transactions of China Electrotechnical Society, 2005, 20(9)∶ 72-76.
[10]张晓峰, 吕征宇. 基于级联式拓扑的消除无刷直流电机传导区转矩脉动方法[J]. 电工技术学报, 2007,22(1)∶ 29-33.Zhang Xiaofeng, Lü Zhengyu. A novel method to eliminate the conduction torque ripplein BLDCM using cascade topology structure[J]. Transactions of China Electrotechnical Society, 2007, 22(1)∶ 29-33.
猜你喜欢
家教世界(2023年25期)2023-10-09 02:11:56
大电机技术(2022年5期)2022-11-17 08:12:56
中国特种设备安全(2022年3期)2022-07-08 02:21:56
煤气与热力(2021年7期)2021-08-23 01:11:10
煤气与热力(2021年6期)2021-07-28 07:21:36
阅读(低年级)(2018年5期)2018-05-14 15:47:44
电子制作(2017年1期)2017-05-17 03:54:12
当代化工研究(2016年6期)2016-03-20 16:21:46
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
