
基于FFT 的水下动目标回波仿真
2012-07-02 00:49:54李永胜丁永泉吕林夏
兵器装备工程学报 2012年1期
李永胜,丁永泉,吕林夏
(中国船舶重工集团 a.第七零五研究所;b.水下信息与控制重点实验室,西安 710075)
目标回波是指主动声纳的发射波经过目标的反射、散射后,被水听器接收的水声信号,它一般包含目标的距离、速度、方位等参数信息。这些信息是目标探测的基础。由于水下试验环境、设备、费用的限制,有必要对目标回波仿真技术进行深入的研究。
在水声探测中,由于发射平台和目标的相对运动,对于声纳接收机来说,目标回波相对于发射波就产生时间尺度伸缩现象。因此,对于运动目标的回波仿真,关键在于对发射波的时间尺度伸缩进行仿真。
当前,对运动目标回波的速度仿真主要有以下几种方法:
1)利用多普勒频移fd=2v/c·f0对发射波进行多普勒频移处理:g(t)=f(t)ej2πfdt,其中:v 为目标的径向速度;f(t)为发射波;g(t)为目标回波[1]。这种方法将时间尺度伸缩用多普勒频移来简化,只适用于窄带的情况,并且需要知道发射波的中心频率。
2)对于宽带信号,可以采用时间尺度伸缩法来仿真回波。首先根据目标径向速度计算时间尺度伸缩因子s=(c+v)/(cv),然后产生回波信号g(t)=f(st)。这种方法需要明确知道发射波的信号形式和参数[2-3]。
3)当不知道发射波的信号形式和参数时,可以利用插值法来获得时间尺度伸缩后的回波信号[4]。
但是,对目标回波直接在时域上进行插值,由于插值算法的固有特性,将会引入一定的精度损失。为了解决此问题,本文提出了一种基于FFT 插值的算法来仿真目标回波,该算法将时间尺度伸缩等效为频率伸缩,通过在频域上补零完成频域伸缩处理,最后再转换到时域上来获得目标回波[5-6]。
1 运动目标的回波模型
假设声纳收发合置、目标和声纳都是静止的,理想情况下,回波信号g(t)是发射信号的延迟,即g(t)=f(t-τ),τ=2R/c,R为目标到声纳平台的距离。若目标是运动的,即目标距离R 为时间的函数,此时目标回波到达时间

考虑目标匀速运动的情况,此时目标径向速度v =R'(t)保持不变,对式(1)两边求导得

令τ(τ0)=τ0,得

代入式g(t)=f(t-τ(t)),得

式(4)为匀速运动点目标的回波模型[7],其中:s = (c + v)/(c-v)为时间尺度因子为归一化因子,使得接收信号和发射信号的能量保持一致。
2 基于FFT 的回波速度模型
这里只考虑目标速度的影响,忽略时延τ 和归一化因子,则式(4)简化为

对式(5)进行傅里叶变换得[8]

式(6)表示,对信号f(t)在时域中扩展s(s >0)对应于在频域中压缩s,反之亦然。
在离散处理系统中,对式(5)做N 点DFT 可得

下面来推导如何由F(k)来得到G(k)。
考虑s ≤1 的情况,对N 点F(k)后面补零使其长度M=N/s,即此时表示频率另一方面也表示处的频谱值,可见从而可得

考虑s >1 的情况,令L =ceil(N/M)·M,ceil(a)表示取大于a 的最小整数,这样就满足L >N,与上面类似,可以获得:

最后,对G(k)进行逆傅里叶变换,便可得到

整个算法的处理流程如图1 所示。
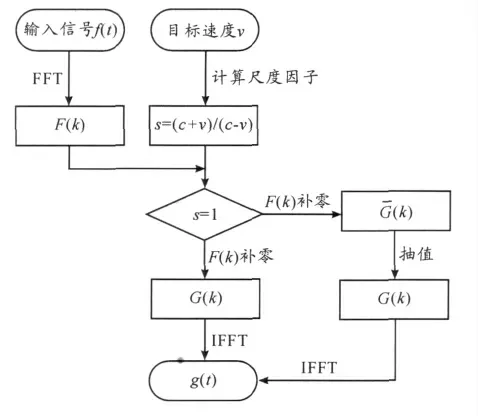
图1 FFT 插值法处理流程
3 仿真及性能分析
常用声纳信号形式有CW 和LFM 信号。本文通过这2 种信号形式的仿真,并且与已知信号形式和参数的时间尺度伸缩法比较,来验证FFT 插值法的准确性和有效性。
1)CW 信号仿真结果见图2、3。设信号中心频率为2 400 Hz,采样率为8 000 Hz,时长为40 ms,目标径向速度为20 m/s。
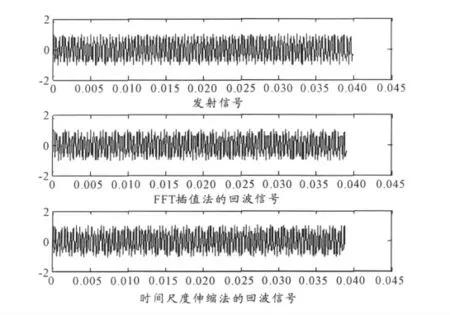
图2 CW 信号回波波形
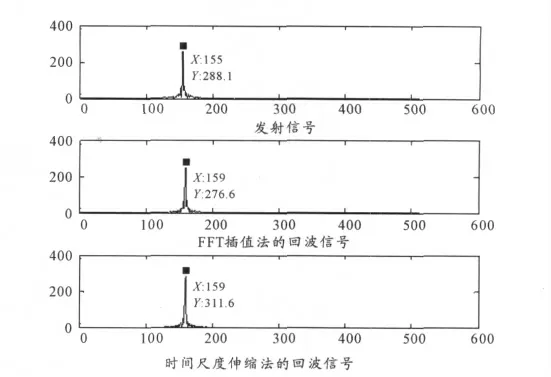
图3 CW 信号回波频谱图
可以看到,FFT 插值法的回波信号和时间尺度伸缩法的回波信号频谱一致,具有相同的频移(X 坐标一样)。
2)LFM 信号仿真结果见图4 ~6。设信号基本参数同上,带宽为1000 Hz,目标径向速度为20 m/s。
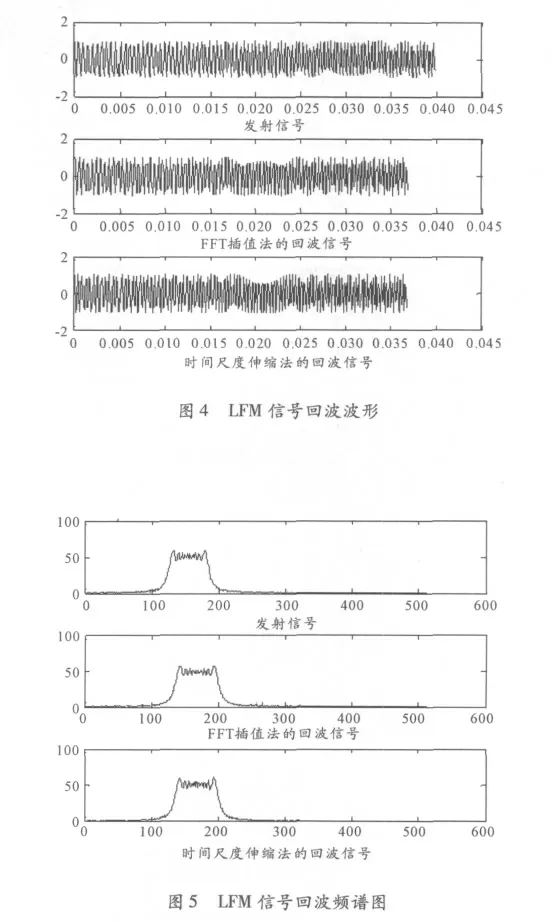
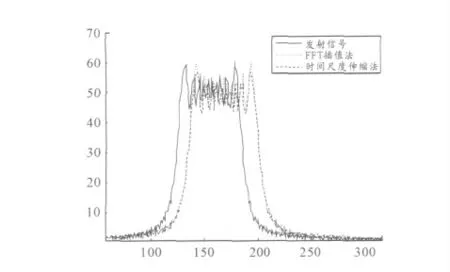
图6 不同算法频谱图比较
可以看到,与CW 信号类似,对于LFM 信号,FFT 插值算法也可以得到准确的结果。
4 结束语
本文提出的基于FFT 的水下动目标回波仿真算法,解决了发射信号形式和参数未知情况下的回波速度仿真问题。与时域插值法相比,该方法避免了插值带来的精度损失,具有与信号形式无关、计算速度快、精度高的优点,因此比较适合应用在水声探测的目标仿真系统中。
[1]刘伯胜. 水声学原理[M]. 哈尔滨:哈尔滨工程大学出版社,1989.
[2]朱埜. 主动声呐检测信息原理[M]. 北京:海洋出版社,1990.
[3]丁永泉,易红.宽频带水声信号目标回波建模与仿真研究[J].鱼雷技术,2006 (2)38 -40:.
[4]程彩,陈丹平,刘大利,等.水下目标回波的多普勒频移仿真与研究[J].现代电子技术,2011 (9):73 -76.
[5]谭晓衡,张毛.一种高精度的改进FFT 频偏估计算法[J].重庆理工大学学报:自然科学版,2010,24(7):71 -75.
[6]龚仁喜,周希松,宁存岱,等.基于LabVIEW 的FFT 加窗插值算法在谐波检测中的应用[J].重庆理工大学学报:自然科学版,2010,24(5):64 -70.
[7]刘朝晖,杨长生.水下声信号处理技术[M].北京:国防工业出版社,2010.
[8]徐天成,谷亚林. 信号与系统[M]. 北京:电子工业出版社,2008.
[9]宋振宇,丁勇鹏,赵秀丽.基于LOFAR 谱图的水下目标识别方法[J].海军航空工程学院学报,2011(3):283 -286.
猜你喜欢
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
智富时代(2019年7期)2019-08-16 06:56:54
电子测试(2018年14期)2018-09-26 06:04:12
航空兵器(2017年6期)2018-01-24 15:00:10
农业与技术(2016年24期)2017-04-20 10:20:18
火控雷达技术(2016年2期)2016-02-06 02:29:03
石家庄铁路职业技术学院学报(2015年3期)2015-11-30 08:41:09
电源技术(2015年7期)2015-08-22 08:48:34
西安电子科技大学学报(2014年5期)2014-07-25 11:29:09
