
机载预警雷达检飞航路设计技术研究
2012-06-18 04:45郭振坤
中国电子科学研究院学报 2012年5期
郭振坤
(中国电子科技集团公司第27研究所,郑州 450047)
0 引言
现代机载预警雷达主要用于对空中、海面多个目标的早期预警,它采用脉冲多普勒和有源相控阵技术,通过电子方法实现天线波速指向在空间的转动或扫描,实现对空中飞行器的探测和跟踪[1]。从作战使命看,雷达在方位上的搜索范围应该是360°全方位,才能满足预警探测和指挥引导功能的需要。然而在实际工作中,由于载机升空飞行对电磁波遮挡反射的影响[2],以及相控阵雷达电子扫描原理的特点,机载预警雷达在360°方位上的探测能力是不尽相同的;同时,其探测性能与配试目标机之相对航向、航速也有密切的关联。
机载预警雷达在检飞试验中,如何合理设计载机和配试目标机航线,实现分方向统计探测距离,满足雷达对多方位目标探测能力检飞的需求,全面真实的考察机载预警雷达的探测威力[3],是外场检飞试验中的一项重要工作。
1 雷达多方位检飞需求
首先,从作战需求来说,全方位搜索才能对敌方多架次全方位入侵时不遗漏目标;同时,对载机本身的安全警戒亦要求对100 km安全线上全方位的连续监视,以防备敌机或敌方导弹对载机本身的偷袭。其次从引导任务看,敌方目标来袭方向与我方拦截机出动方向不同,可以相差180°,因此机载预警雷达不可能像战斗机多功能雷达那样只照射前半球,预警雷达在引导多批战斗机的同时,又要保持搜索警戒,更要求具有全方位的监视能力[4]。
其次,虽然机载预警雷达可以实现360°的方位覆盖,但雷达阵面电扫描角不宜大于 ±60°,覆盖360°需要3个阵面。受T/R组件数量和在天线阵面上排列间距的影响,天线有效口径及天线增益随波束扫描角增大而降低,导致作用距离和测量精度变差。相控阵雷达波束在扫离阵面法线时,增益按cosφ(φ为波束偏离法线方向的角度)降低,波束宽度则反之按1/cosφ增大。如要求阵面扫描±60°,则收发双程天线增益在±60°处下降6 dB[5]。为了使雷达在360°环扫中具有相同的探测威力与测向精度,则要求在每一阵面扫描离开法线时相应降低扫描角速率,以增大波束对目标的驻留时间,通过更多回波脉冲的积累来挽回天线增益的损失,即由原来的 n0增加至 ns,ns=n0/cos2(φmax)。
当φmax分别等于45°和60°时,波束驻留时间应增加至2n0和4n0[6]。因此,对补偿后雷达实际探测能力需要进行飞行验证。
第三,受载机升空飞行的影响,雷达对目标的探测会受到机身、垂尾和机翼的遮挡,以及垂尾和机翼存在反射和地面的多径效应等,这些因素都会影响机载预警雷达对不同方位目标的探测能力。
第四,参考有关国军标中对空情报雷达检飞方法,配试目标机相对雷达的航向角(含向、背站航向角)应保持恒定,误差应小于 2°[7]。
综上所述,机载预警雷达在进行外场飞行试验时,需要合理安排配试目标机的检飞航线,以典型角度进入预警雷达探测区域,检查雷达对多方位目标的探测性能,进而评估机载预警雷达在360°全方位覆盖的探测能力。
2 检飞航线设计
2.1 航线设计原则
一般说来,检飞航线设计遵循的原则是:
(1)检飞测路应便于检飞的指控和安全操作;
(2)航路的有效区段应采用同一高度同一速度平稳飞行,以保证数据的有效性;
(3)航线的长度应满足近端小于雷达的探测盲区,远端应超过雷达最大探测距离指标要求的20%,使航线能够覆盖雷达的整个探测区段;
(4)尽量占用较少的检飞空域;
(5)应能够用较少的架次获取尽可能多的检飞数据样本量。
2.2 航路设计
2.2.1 等飞行条件
等φ飞行示意图如图1所示,设雷达载机A由A点向A'点匀速飞行,飞行速度为VA;目标机T同步由B点向B'点匀速飞行,飞行速度为VT。飞行过程中,雷达对目标机T进行探测,为考核在典型角度下雷达探测性能,就要求在飞行试验过程中目标机相对载机雷达的扫描角度φ始终保持不变,并且径向速度保持始终不变,还有载机A和目标机T的初始位置A、B点间距离满足雷达最大探测距离要求。
为保持等φ飞行,根据正弦定理,目标机T飞行航向角ψ由式(1)确定,

式中,VT为目标机的速度;ψ为飞行航向角,其定义如图1所示。
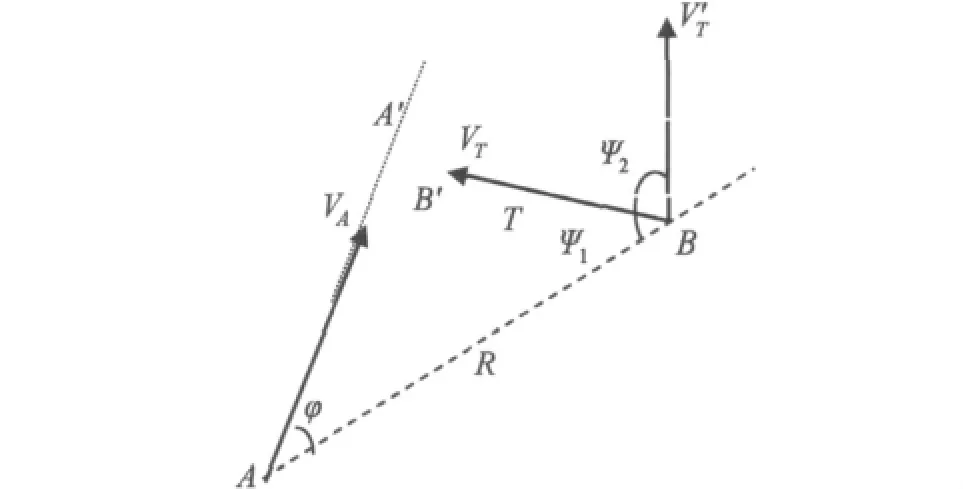
图1 等φ飞行示意图
由式(1)可得

由式(2)解得的 ψ 为双值 ψ1和 ψ2,ψ1<90°,ψ2>90°,前者径向速度为正,后者为负。
进一步分析还可以得出以下结果:
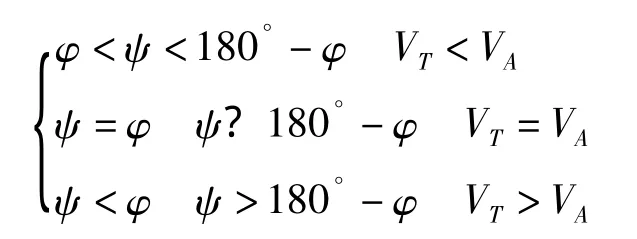
目标机相对载机的径向速度为

2.2.2 径向速度(VTR)为正的航路
a)对角线航路
对角线检飞航路的示意图如图2所示。A0A1A0为载机航线,B0B1B0为目标机航线。载机航线的有效区段为A0O和A1O,目标机航线的有效区段为B0O和B1O。
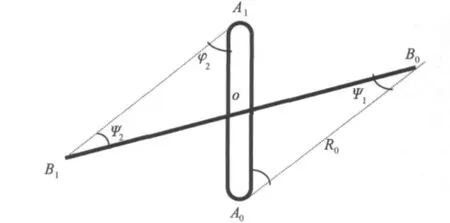
图2 对角线试飞航路
当满足等φ飞行条件式(1)时,即VTsin ψ=VAsin φ,这里有
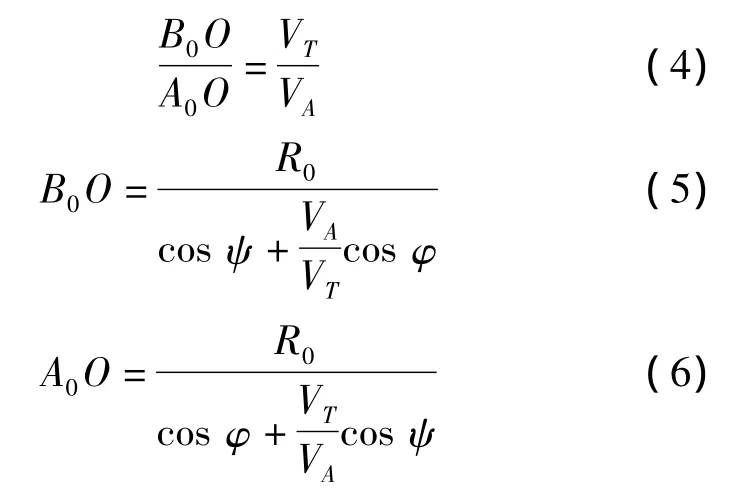
利用式(4)~(6)可以估计所需空域的范围。
设:
R0=440 km,VA=180 m/s,VT=270 m/s,φ =60°。
则:
ψ =35.3°,B0O=383 km,A0O=255 km。
这需要一个约800 km×500 km的飞行空域。
b)K型航路
对角线航路需要较大的飞行空域。飞行空域受限时,采用的K型航路如图3所示。K型航路可以看作是将图2中的OB1段目标机航线以A0A1为轴折叠于B0O同侧。一个约400 km×400 km的空域即可满足要求。

图3 K型航路
2.2.3 径向速度(VTR)为负的航路
a)航路参数
当载机由A0飞至O时,目标机由B0飞至B1,并保持等φ飞行状态,如图4所示。OB1对应于雷达最大探测距离R1。等φ飞行的条件是

注意式(7)中ψ1的定义与图2有所不同,为互补关系。由于

利用式(8)可确定目标机的切入点B0。
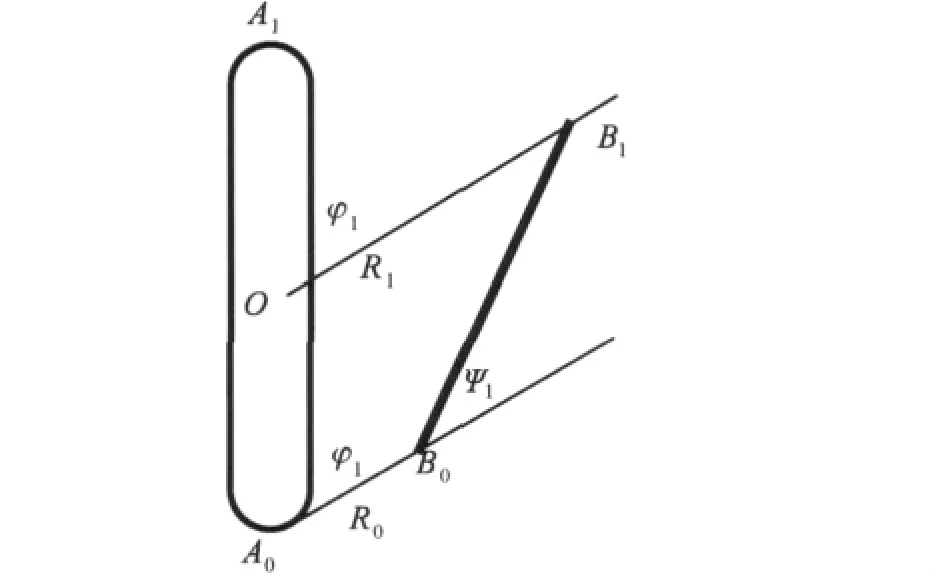
图4 负VTR航路参数
b)航路设计
一种双K型负径向速度飞行航路,如图5所示。在一个飞行周期内,载机的航线为A0A1A0,目标机的航线为B0B1B'0B'1B0。目标机飞行的有效区段为B0B1和 B'0B'1。
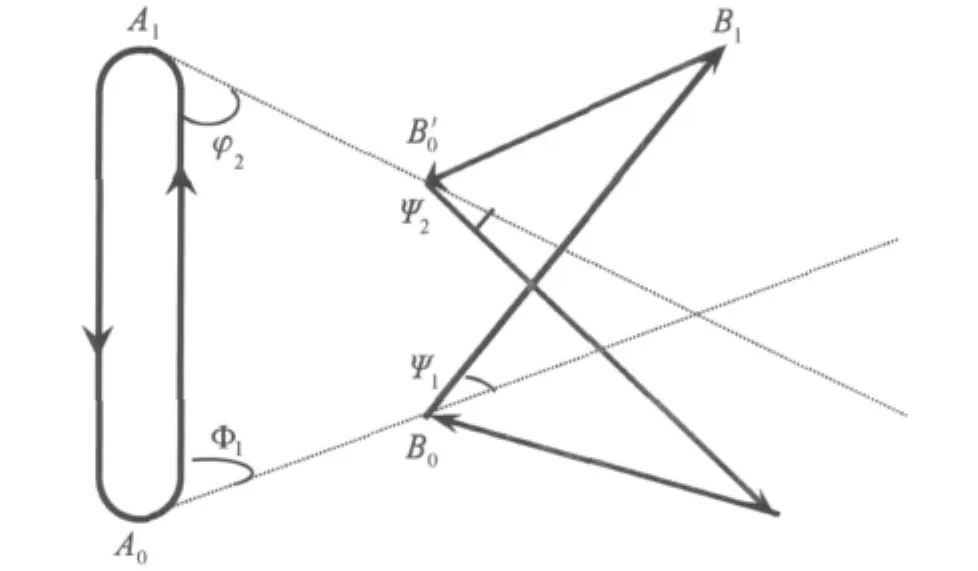
图5 双K型航路
3 仿真验证
取2.2.2中“a)对角线航路”里的计算值进行仿真验证。
在图2中,设雷达载机航线为A0A1,配试目标机航线为 B0B1,航线相交点设为 O,A0距O点为255 km,B0距O点为383 km,A0和B0相距440 km。
在t0时刻,雷达载机由A0点向O点飞行,飞行速度为VA=180 m/s,目标机由B0点向O点飞行,飞行速度为VB=270 m/s,相对载机的航向角ψ=35.3°。采用仿真验证在试验飞行时,雷达对目标机的探测角度和探测距离随飞行时间的变化情况。
飞行过程中,载机、目标机和O构成一个三角形,保持目标机相对载机航线的飞行航向角为ψ=35.3°时,运用正弦定理,可以计算出雷达对目标机的探测角度φ。
经计算机仿真后,雷达对目标机的探测角度和探测距离随飞行时间的变化情况如图6所示。

图6 雷达探测角度、距离随飞行时间变化图
图6中,横轴为飞行时间,即飞机由远点A0、B0飞到O点的时间,细线为飞行过程中雷达探测距离随时间变化情况,从440 km到最小探测距离的覆盖,粗线为雷达在整个探测过程中对配试目标机探测角度变化情况,始终为60°左右保持不变。实现了原定的对雷达阵面60°夹角方向雷达探测威力检飞样本需求。
同样,也可设计其他典型检飞角度(如30°、45°等)的检飞航线。
4 结语
载机和配试目标机航线设计是外场检飞技术的重要组成,也是试飞试验大纲编制、飞行架次计算的基础。合理的检飞航线不但可以全面检测机载预警雷达的探测能力,并可以有效减少检飞空域等检飞资源对检飞工作的限制,还能够提高检飞效率,在有限的载机检飞架次里获取更多的检飞数据。所讨论的等“φ”航线设计方法,为外场检飞中的航线设计提出了理论基础,并在某机载预警雷达检飞中得到了运用,合理可行,对后继机载预警雷达检飞具有指导作用。
[1]陈国海.下一代预警机雷达技术[J].现代雷达,2010,32(3):1-4.
[2]曹生,任波.对空监视情报雷达宽带技术应用研究[J].现代雷达,2010,32(5):19-25.
[3]郦能敬,王被德,等,对空情报雷达总体论证[M].北京:国防工业出版社,2008.
[4]陆军,等.预警机系统导论[M].北京:国防工业出版社,2011.
[5]郦能敬.对空监视雷达探测威力检飞的几个问题[J].雷达科学与技术,2003(1):10-12.
[6]张光义,等.相控阵雷达技术[M].北京:电子工业出版社,2006.
[7]国防科学技术委员会.军用地面雷达通用规范GJB74A-98[S].1998.
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
南京航空航天大学学报(2022年2期)2022-04-27
铁道通信信号(2020年6期)2020-09-21
农家科技中旬版(2018年7期)2018-09-25
航空兵器(2017年6期)2018-01-24
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年12期)2017-04-23
农业与技术(2016年24期)2017-04-20
火控雷达技术(2016年2期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
