论指纹的拓扑性质
2012-06-15 18:41:17刘持平
中国刑警学院学报 2012年2期
刘持平
(常州市公安局 江苏 常州 213000)
论指纹的拓扑性质
刘持平
(常州市公安局 江苏 常州 213000)
应用拓扑学原理,指出了指纹“人各不同”和“终生不变”的两大规律的本质,即指纹天然具有的“拓扑不变性质”,为指纹技术理论与方法的创新指出了新方向。
指纹 拓扑性质 矢量数据 栅格数据
1 指纹的两大规律
被誉为物证之首的指纹鉴定,在犯罪对策学中的地位与作用始终是不可动摇的。指纹以它千姿百态的图形展示着“人各不同”和“终生不变”的两大规律。
关于指纹学的核心和精髓:
(1)各人各指不同。各人各指不同是指乳突线花纹结构的形态,乳突线细节的形态、数目、位置、距离、相隔线数和角度关系在其总体上所构成的特定性,亦即独特性,不重复性。
(2)指纹终生不变。指纹终生不变是指纹的第二个基本特性,与指纹各人各指不同一样,它是指纹学又一基本理论问题。指纹终生不变,是这个普遍规律的一个具体表现。指纹终生不变具有分子遗传学、组织学和生理学的根据。
2 拓扑性质
拓扑学在解释拓扑性质的概念时常常将欧氏平面想象成一块橡皮:这块橡皮可以任意地被拉伸、压缩,但是不能够被扭转以及折叠,其表面上有由结点、孤段和多边形组成的任何可能的图形。如果对这块橡皮进行拉伸、压缩,但不对其进行扭转以及折叠,则在这块橡皮形态的变换过程中,图形的一部分属性保持不变,而另一部分属性将会发生变化。例如,假设橡皮表面上有一个多边形,其内部有一个点,在对橡皮进行拉伸、压缩后,点仍然存在于多边形内部,即点与多边形的空间位置关系没有改变,但是多边形的面积却发生了变化。
橡皮的这种拉伸和压缩称为拓扑变换,在这种变换中,能够保持不变的属性称为拓扑属性,发生变化的属性称为非拓扑属性。
拓扑属性:(1)点是一个弧段的端点;(2)点在多边形的边界上;(3)点在多边形的内部;(4)点在多边形的外部;(5)点在环的内部;(6)弧段是一个单一的弧段,弧段自身不相交;(7)面是一个简单的面,面中没有“岛”;(8)面的连接性,面内任意两点可以通过面的内部沿任意线路连接起来。
非拓扑属性:(1)两点之间的距离;(2)一个点指向另一个点的方向;(3)弧段的长度;(4)多边形的周长;(5)多边形的面积。
3 指纹的拓扑性质
拓扑学是现代几何学的一个分支,它主要研究“形态在经过特定变换后仍然保持不变的几何属性——拓扑属性”。指纹是典型的拓扑图形,自然成为了拓扑学重点研究的对象之一,其最重要的成果是由此产生了指纹自动识别技术。
对于指纹学而言,非常容易理解图形特定变换的概念以及不变的属性含义。因为指纹恰恰是一种可以被有限地拉伸、压缩,但是不能够被扭转以及折叠,其表面上有许多细节结点和多边形,能组成任何可能形式的图形。
拓扑学为指纹学的研究提供了强大的数学方法。每枚指纹都是典型的拓扑图形,都存在多种形式的拓扑空间关系,包括点与点、点与线、线与线、点与面、线与面、面与面等拓扑空间关系。而每一种形式的拓扑空间关系中又包含更多的子形式。在指纹的拓扑关系结构中,“点是相互独立存储的,它们相互连接构成线,线始于起结点,止于终结点。面由线(线段、弧段、链、环等)构成。一个多边形可以由一个外环和零个内环或多个内环组成,简单多边形没有内环,复杂多边形由一个或多个内环组成。这些内环所包围的区域称为,‘岛’或‘洞’。前者有实体意义,后者无实体意义。”拓扑关系清晰地反映了指纹细节特征之间的逻辑关系。指纹图形中的拓扑关系的研究,对正确认识任何一个指纹或任何一局部指纹的拓扑特性等都具有重要的意义。所以指纹自动识别技术的理论与方法的核心基础是拓扑学,指纹自动识别技术是拓扑学在犯罪对策领域应用最显著的成果之一。
指纹图形中的点、线、面组合既有规律性又有一定的复杂性。指纹拓扑关系主要有三种:一是拓扑邻接关系;二是拓扑关联关系;三是拓扑包含关系。
(1)拓扑邻接关系:是指存在于指纹图形同类元素之间的拓扑关系。例如点A与点B之间,块K1、K2与块K3之间是邻接关系(图1)。

图1 拓扑邻接关系图
指纹图形中,弧段与端点关系是最常见的体现了邻接性的拓扑关系。每个弧段都有一个起始点与一个终止点,弧段的方向为从起始点到终止点(约定俗成,指纹图形依顺时针方向旋转为序,同一根弧段,左、上的端点为起点,右、下,含旋转360度以上的端点为终点,见图2)。

图2 邻接性拓扑关系图一
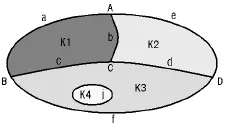
图3 邻接性拓扑关系图二
所有弧段的端点序列就定义了弧段与端点之间的拓扑关系,计算机通过端点序列中的弧段之间的共同端点来判断弧段之间的邻接性。例如图1中,弧段b与e有共同的结点A,因此,计算机通过追踪弧段b并转到弧段e是可能的,而与没有共同结点的弧段f,要直接从弧段b追踪到f行不通,但可以通过弧段-端点列表中的弧段端点B或D而间接追踪(图3)。
指纹图形中,邻接性还体现在弧段左与右、上与下的拓扑关系上,这种关系需要通过定义弧段的左、右边、上、下边以及弧段的方向来确定。要判断弧段两边的邻接关系,就必须明确弧段的方向以及在该方向上左右或上下的多边形。如图1所示,多边形K1和多边形K2因为都有弧段b而相邻,但却不能准确确定多边形相对于弧段的左右关系。只有当明确了弧段的方向后,多边形K1和多边形K2邻接性的拓扑关系(左与右、上与下)才真正明确(图4)。
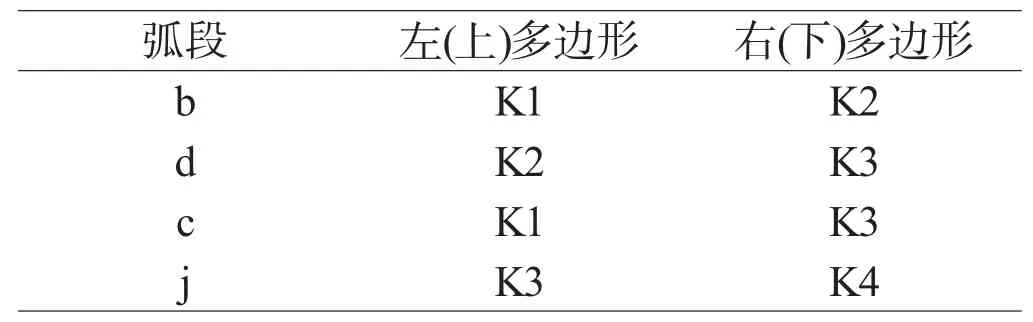
弧段 左(上)多边形 右(下)多边形b K1 K2 d K2 K3 c K1 K3 j K3 K4
(2)拓扑关联关系:指存在于指纹空间图形不同类元素之间的拓扑关系。例如结点A与孤段a,b,e之间的关联关系(取中心花纹下的三角为例);多边形K1与孤段a,b,c之间的关联关系等(图5)。
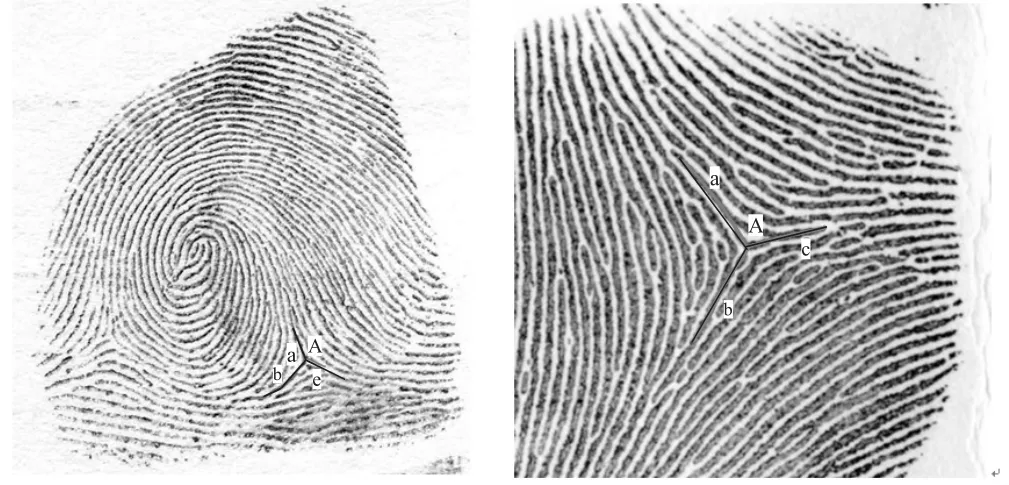
图5 不同类元素拓扑关系图
(3)拓扑包含关系:指存在于指纹空间图形同类但不同级别元素之间的拓扑关系。例如大多边形中包含一小多边形,或多边形中有不与多边形关联的弧段或点等(图4)。
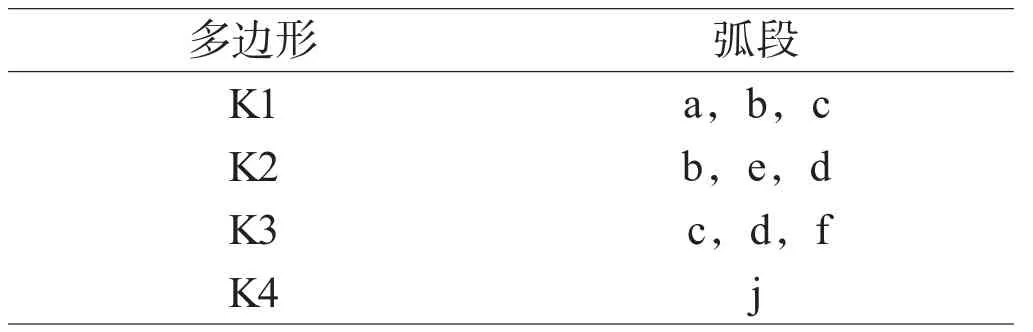
多边形K1 K2 K3 K4弧段a,b,c b,e,d c,d,f j
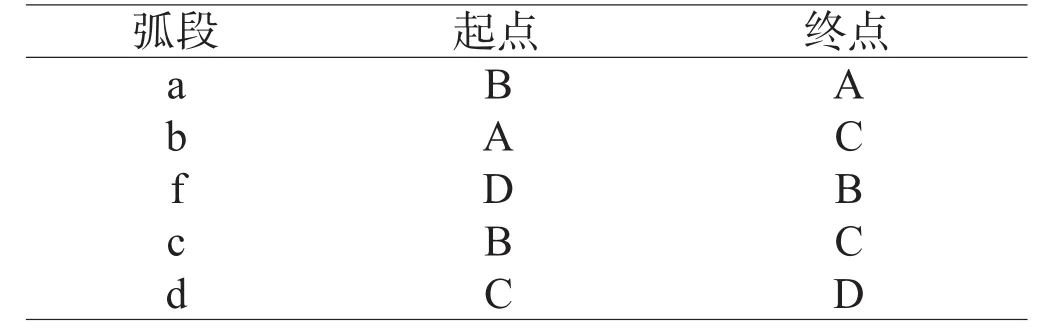
弧段abfcd起点 终点B A A C D B B C C D
若干个弧段首尾相连构成了多边形的内部区域。多边形与弧段之间的拓扑关系不仅体现了多边形区域的定义,甚至还体现了拓扑包含关系。如图1所示,弧段c,d,f,j组成了多边形K3,其中弧段j构成了多边形K3中的内岛K4,多边形K3包含了K4。
图6中,多边形区域a中包含了多边形b。

图6 拓扑包含关系图
对于这种拓扑关系,拓扑学是用空间数据模型进行描述的,它为空间数据的组织和空间数据库的设计提供了基本思想和方法。在指纹识别系统中,主要有矢量数据模型、栅格数据模型等基本的数据模型,矢量和栅格结构是计算机描述空间实体的两种最基本的方式。
3.1 矢量数据模型
3.1.1 矢量数据模型的表达
(1)零维矢量:是空间中的一个点,在数学中点无大小、无方向,通常用于表示抽象的点状实体,如地图上的城市、乡镇,指纹中常有无方向性的点特征出现。在二维空间中,零维矢量用唯一的实数对(x,y)表示,在三维空间中用唯一的数组(x,y,z)表示。
(2)一维矢量:一维矢量是空间中的一条线,又称之为弧段、链等。在地图中通常用于表示公路、河流等线要素,或行政区域边界等。一维矢量有长度(等于矢量方向上相邻两点之间距离的和),但不含宽度与高度元素量。有方向,在二维欧氏空间中,用一组离散的实数点表示一维矢量,如(x1,y1)表示为起始点,(xn,yn)表示为终止点;在三维欧氏空间中,则用(x1,y1,z1)表示为起始点,(xn,yn,zn)表示为终止点。指纹自动识别系统中最典型的一维矢量出现在指纹数据的锐化之中,它本质性地反映了指纹特征图与指纹原图的区别,因为指纹原图含有宽度数据量(图7)。

图7 指纹锐化数据图
(3)二维矢量:二维矢量是空间中的一个面,在地图中通常用多边形表示面状要素,如岛屿、农场、行政区划等。二维矢量的参数包括面积、周长、走向、凸性、倾角、倾向等。在二维欧氏空间中,用一组由弧段组成的闭合的多边形表示;在三维欧氏空间中,二维矢量表示为空间曲面:一是通过设定等高距,把具有相同高程的点连接起来形成等高线,完成对空间曲面的描述,地图中常见有地形等高线图;二是按一定的间距和剖面方向切割空间曲面,形成的多细曲面反映了实际的空间曲面形态,例如指纹乳突花纹剖面图(图8)。

图8 指纹乳突花纹剖面图
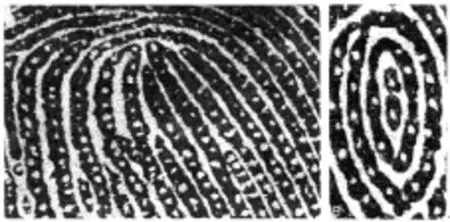
图9 单一乳突纹线图
平面指纹是典型的二维欧氏空间中的二维矢量图,因它有长度和宽度,若放大了若干倍后观察,单一乳突纹线非常明显地表现出了面积与边界的多边形形态特征的特点,并且还有若干汗孔所形成的“岛形图形”,这也就是为何条件好的单一乳突纹线也具备鉴定条件的原理(图9)。
(4)三维矢量:三维矢量是指三维空间中的实体,是由一组或多组空间曲面所包围的客间客体,具有长、宽、高度,空间曲面的面积、体积,空间曲面的周长等要素,地图中最常见的三维矢量是用于描述建筑物。三维矢量在指纹学中用的不多,通常只表现在立体指纹中,但在足迹、工具、枪弹、车辆、法医物证等检验中可常用到。
3.1.2 矢量数据模型的特征
(1)矢量数据模型有很高的工作效率与精度。在几何变换操作中,形态和图形的识别与编辑定位,可根据坐标直接存储,而属性则可隐含于文件夹或数据结构之中。这种独特的特点和图形运算的识别算法,虽总体上比栅格数据结构要复杂的多,但却十分适合于指纹图形的编辑与识别,于是传统的指纹技术与先进的计算机技术、互联网技术天衣无缝地实现了完美的结合,结出了丰硕的个体识别技术之果,当然还包括瞳孔识别、声纹识别、DNA识别、测谎技术等科技成果,无一例外地都应用了矢量数据模型原理与方法。
(2)在矢量数据模型中是用点、线、面、体描述空间对象。这种描述对指纹形态而言,它不像声纹识别、DNA识别有个原形与最终数据形态的转换,而几乎是依葫芦画瓢,十分形象与直观,为众人所接受。
(3)特别适合于模拟离散(非连续变化)的空间数。对指纹乳突纹线图形而言,它在空间上的变化不是连续的,属性变化主要发生在边界上。乳突纹线(当不考虑汗孔形态时)、小犁沟面的内部原素是同质的,因此用矢量数据模型来描述指纹十分的便捷。
(4)数据精度高是其又一大特点。矢量数据模型模拟指纹等空间对象时,是通过记录坐标对的方式进行的,因此其精度与点的数量与质量直接有关,点的数量越多,点的位置越精确,模拟的精度就越高。在指纹比对中,相同指纹在排位序列中得分越高,位次越趋前。若指纹中点的数量越多,其比对速度越慢,即是以比对速度的损失为代价换取精度的。
与比对精度相关的实践还告诉我们,当面对大容量、海量数据检索时,会发生点的位置少而精则排位靠前;而点的位置越多,排位越往后的悖理现象。究其原因,一是点的位置越多,点位人为误差概率产生累计效应;二是同一手指数次形成的指纹,在局部上会有较大差异(如相同部位没有同时出现、相同部位同时出现了但清晰度不同),最终造成数据库中其他原素相似、接近的指纹占领了一定量的排位位置,而将其挤出设定的阈值区域外。所以,如何首先选择质量高的细节特征点,和如何设定最佳的比对点数量,是从事指纹比对核心算法开发和直接从事比对工作的同志需认真追循的优选法。这也是衡量一个指纹比对系统先进与否的标准之一。
3.1.3 矢量数据的获取
在地理信息领域,矢量数据的获取采用各种定位仪器设备如全站仪、经纬仪等,可快速获取地球表面上任意是点的坐标,或是采用硬拷贝数据方式获取,或通过间接转换栅格数据,或将已有信息通过空间分析的方式获取。
在指纹自动识别系统中,指纹大多通过照相、纸张捺印的数字化,或直接人指扫描采集、硬拷贝数据方式获取。总体看相对比较的简单易行,可操作性很强,适合于大批量操作。
3.2 栅格数据模型
“栅格数据模型是一种用规则排列的像元阵列来描述空间目标对象的数据模型,它主要用来描述空间实体的级别分布特征及其位置。在栅格数据模型中,对空间实体的最小表达单位为一个像元或像素(cell或pixel),依行列构成的像元陈列称为栅格(grid)。栅格像元最常用的形状是正方形,但也可能是长方形、三角形或六边形。
3.2.1 栅格数据模型的表达
在栅格数据模型中,点表现为具有一定数值的栅格像元;线表现为按线形特征相连接的一组相邻像元,每个栅格像元最多只有两个相邻像元在线上;面表现为按二维形状特征连续分布的一组像元,每个栅格像元可以有多于两个的相邻单元属于同一区域(图10)。
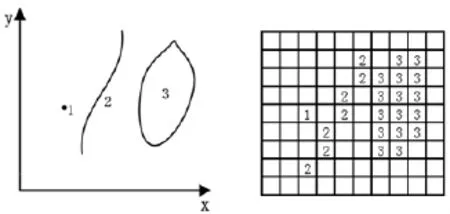
图10 点(1)、线(2)、面(3)的栅格表示
3.2.2 栅格数据模型的特征
(1)属性明显,定位隐含
栅格数据直接记录空间对象的属性本身,而所在的位置则根据像元的行列号转换为坐标得到。如图所示,栅格数据表达了属性为1的一个点实体、属性为2的一个线实体和属性为3的一个面实体。栅格数据的阵列方式很容易为计算机存储和操作,而且易于维护和修改。
(2)在栅格结构中,其精度与分辨率有关
栅格数据的空间分辨率,取决于它每个像元所实际代表的面积区域的大小。每个像元所实际代表的面积区域越小,栅格数据阵列的分辨率就越高,该数据就越能表达所描述对象的空间现象细微特征,同时,数据量也就越大,数据处理时间也就越长。即随着分辨率的提高,数据存储空间以及处理的时间将以几何级数增长。
(3)栅格数据的分辨率对数据精度的其他影响
对数据精度的影响,主要表现在像元在位置移动、形状畸变、属性的偏差几个方面。
①位置的移动:矢量的点经栅格化后,像元的中心点与原矢量点会发生空间位置的漂移。理论上最大的位移量为像元大小的0.707倍。像元越大,分辨率越低,则移动越明显,精度就越低。
②形状的畸变:多边形经栅格化后,形状发生比单一矢量点更大的畸变,同理,分辨率越低,则畸变越明显,精度就越低。
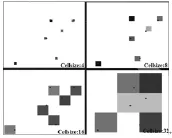
图11 位置移动
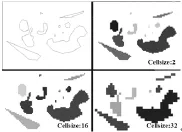
图12 形状畸变
③属性的偏差:如图13所示,点在栅格化后,当像元大小为32时,像元属性与点的属性保持一致;当像元大小为64时,属性值为13和16的点转化为同一个像元,其值只能取其一,因此造成像元属性出现偏差。由此可见,随着栅格数据分辨率的降低,数据属性越有可能出现偏差,精度越低。

图13 属性偏差
3.2.3 栅格数据的获取
在地理信息系统中,栅格数据的获取主要通过遥感影像数据获取,规则点采样、不规则点采样及插值获取,扫描仪、摄像机等设备获取,通过矢量数据的转换获取等方式进行。在指纹自动识别系统中,主要采用数码相机照片、摄像机视频、扫描仪扫描等方式,就可以高精度、快捷地将指纹(包括其他物证)资料转化为标准化的栅格数据,因为这些数据都是以行列为单位的数据列阵,可以很方便地在计算机中建库。
3.3 矢量数据模型与栅格数据模型的比较

矢量数据模型与栅格数据模型的比较表
矢量数据模型与栅格数据模型是刑事技术中常用的两种最主要的数据模型,由于两种模型在结构上截然不同,因此具有不同的特征。
4 结论
综上所述,拓扑学明确地阐明了指纹的“人各不同”和“终生不变”两大规律的本质是指纹天然具有的“拓扑不变性质”。同时拓扑学为指纹识别技术解决了长期困扰的三大理论与方法问题,为痕迹检验学的创新打开了一扇崭新的大门。
(1)完美地解答了为何同一个指纹在不同场合、不同承受客体、不同作用力条件下形成的若干个指印,可以进行指纹与指印、指印与指印之间同一认定的问题。众所周知,指纹存在终生不变的特性,但并不是说所形成的指印终生不变。指印在形成的过程中,因手指动作的改变、作用力方向与轻重变化、承受客体光滑程度等诸因素的影响而有所变化,有所不同。即事实上,我们每一次将一枚新的现场指纹进行比对时,每一枚指纹均不同。在拓扑学看来,每一次形成的指纹,相当于是造形物——指纹“图形在一对一的双方连续地变换”,变换后所形成的特定形态的新的指纹,其图形中所含有的几何特性——拓扑属性仍然保持不变,这是为何同一枚手指在不同场合所形成的指纹可以进行同一认定的理论基础。
(2)完美地解答了为何残缺不全的指纹同样可以进行同一认定的问题。实践中,尤其是对犯罪现场指纹进行比对时,极少出现两枚指纹同时具有100个细节特征相互比对的情况发生,因为犯罪现场指纹大多残缺不全,或局部模糊不清,导致一枚犯罪现场指纹可供同一认定比对的能有20个左右的细节特征已是极大的幸运。这绝非作案者故意逃避打击,伪装所为,而恰恰是人的正常动作的结果。所以经过一百余年无数例指纹检验的实践,最终总结形成了欧美国家赞成(或规定)12个细节特征为具备鉴定条件的标准,我国约定俗成的是8个以上细节特征具备鉴定条件的模式。指纹业界都认为,若一枚指纹面积较小,细节特征低于数量临界线,其细节特征重复的概率会急剧升高,容易使鉴定者产生认识上的经验性错误,因此通常认为这类指纹不具备进行科学鉴定的基础。不应否认,这也是实践中总结出的经验之谈。
由于没有确定的数量界限标准,所以国际指纹学界至今未能制定出一个统一的指纹鉴定标准,对残缺不全的指纹在怎样的条件下具有同一认定所需的“唯一性”,长期以来缺少有说服力的解答。
拓扑学与概率论最大的不同在于:拓扑学在讨论最一般的几何图形时,是将图形看作是一个函数,给定一个函数定义域。它认为,在映射f:A→B的条件下,集合A(函数的定义域)的每个点x,必定对应另一个集合B的相应点f(x)。两者是一一对应的,被映射到集合B的每个点恰好是集合A的一个点,在映射下f没有重叠,是同胚映射,证明了两者具有相同的拓扑性质。
以指纹图形为例,按照拓扑学原理,一枚指纹就是一个函数定义域,一枚指纹中的一小部分也可能是一个特定的函数定义域,即指纹图形集合中包含有若干个子集,即若干个特定的函数定义域。集合是可分合的,并且无论是全集、中集或子集,都可能含有不变的拓扑性质。因此,最低的检验标准应该是:只要当某一子集之数据具备了拓扑性质的条件时,它才具备了进行同一认定的条件,而与指纹面积的大小、细节特征的数量多少无关。
(3)完美地解答了为何变形指纹也可以进行同一认定的问题。变形指纹,尤其是变形大的指纹是检验实践中的一大难题。但对拓扑学而言,研究几何图形在一对一的双方连续变换下不变的性质中,图形弹性变化的分析是其独特的理论强项。
(4)对于指纹自动识别系统而言,通过研究拓扑关系进而确定拓扑性质,对于指纹的数据处理和空间分析,具有重要的意义:①它是全部指纹自动识别技术的理论与方法的基础;②通过拓扑关系,不需要利用坐标或距离,就可以确定一个空间实体(点、线、面)相当于另一空间实体的位置关系,它比几何数据有更大的稳定性,不随图形的投影的变化而变化;③利用拓扑关系,有利于指纹要素的查询。例如一条乳突纹线的端点,穿过几条乳突纹线才与某个端点联成假设的直线;某个端点,某条乳突纹线与哪些端点,乳突纹线相邻;某点、线、面属于哪些类型等;④利用拓扑数据作为工具,可以重建指纹实体原图;⑤拓扑关系还可以为指纹数据错误检查、空间数据编辑、属性数据输入、空间分析功能的实现等方面提供方便。
在大多数的软件数据库中,“仅存储部分拓扑关系,主要是关联关系(不同类元素之间的关系),其他关系可以从这些关系中导出,或通过空间运算得到。软件中拓扑关系有两种表达方式:①全显式表达。它是指对结点、弧段、面块相互之间的所有关联关系进行围式储存。如不仅要明确存储面块-弧段结点的拓扑关系,还要存储结点-弧段-面块的拓扑关系;②半隐含式表达。如果仅部分表格表示几何目标的拓扑关系,称为半显式表达,或半隐含式表达。如图4使用了表1、表2表达从面块到弧段、弧段到结点的上下拓扑关系,其他关系则隐含表达,需要时再建立临时的拓扑关系。虽然人们对拓扑关系的表达进行了大量的研究,提出了更为复杂的关联和邻接关系,但到目前为止,各种使用的软件还没有超过使用上述所列的各种关系。”
指纹拓扑数据结构的构建(俗称核心算法)是一项难度与复杂性极大的数据编辑工作。指纹自动识别系统的应用,都必须具备这种预先存储的、耗费大量精力才能创建的数据结构。因此,如何优化预先存储拓扑关系、存储哪些拓扑关系将成为指纹自动识别技术创新的焦点。
1.赵向欣.中华指纹学[M].北京:群众出版社,1997
2.刘少聪.手印学[M].北京:警官教育出版社,1994
3.田永中,等.地理信息系统基础与实验教程[M].北京:科学出版社,2010
4.李建松.地理信息系统原理[M].武汉:武汉大学出版社,2006
猜你喜欢
上海航天(2024年1期)2024-03-08 02:52:28
电子设计工程(2022年24期)2022-12-23 12:03:28
光学精密工程(2021年8期)2021-10-04 11:46:28
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:48
电子测试(2017年12期)2017-12-18 06:35:36
地矿测绘(2016年2期)2016-07-16 03:03:01
河南水利与南水北调(2015年23期)2015-11-26 02:38:46
四川建筑(2015年4期)2015-06-24 14:08:40
测绘科学与工程(2013年1期)2013-03-11 15:07:24
城市建设理论研究(2012年19期)2012-10-15 04:17:46