高速插秧机无线遥控驾驶系统的设计
2012-06-08 04:08:38谢昌盛蒋蘋胡文武罗亚辉童艳利
湖南农业大学学报(自然科学版) 2012年4期
谢昌盛,蒋蘋,胡文武,罗亚辉,童艳利
(湖南农业大学 工学院,湖南 长沙 410128 )
1999年,日本农林水产省农业研究中心在基于GPS定位技术基础上研发了插秧精度为8 cm的无人驾驶插秧机[1]。中国华南农业大学研究成功了基于RTK-GPS和电子罗盘的久保田SPU-68型插秧机自动导航驾驶系统[2]。为保证插植秧苗的精度,这些研究都是在基于高精度GPS基础上完成的,由于价格昂贵,难以在经济欠发达的南方丘陵水稻产区推广使用。株洲现代农装生产的 2ZG630A型插秧机为电启动发动机,液压助力转向,主变速器采用 HST液压无级变速器来控制插秧机前进或后退的速度。为了开发低成本的基于双激光源定位的无人驾驶插秧机,笔者对 2ZG630A型插秧机运动控制系统进行了改造,拟通过无线遥控的方式验证其准确性与可靠性,以期通过设计遥控驾驶系统,控制插秧机的速度和方向及发动机点火/熄火,实现对插秧机在100 m范围内的遥控驾驶。
1 遥控驾驶系统总体结构与工作原理
遥控驾驶系统包括上位机和下位机两大部分。上位机由PC机和1个2.4G无线数据收发器组成,二者通过串口进行数据交换;下位机由中央处理器、2.4G无线收发模块和各个控制单元组成,直接执行控制命令。上位机和下位机之间通过 2.4G的无线模块进行协议通信,下位机收到上位机的控制命令后执行相应的动作。
在上位机遥控插秧机工作时,需要控制发动机的点火/熄火、转向、前进与后退速度等。发动机点火/熄火采用专用的单元电路控制,系统将点火/熄火模块与发动机启动开关并联,中央处理器在收到相关命令后,通过点火/熄火单元电路控制发动机的点火或熄火。插秧机转向采用步进电机带动方向盘来实现,步进电机和方向盘转轴用同步带轮连接;为检测前轮转过的角度,在插秧机转向轴上安装绝对式编码器来采集方向盘转动角度;利用中央处理器产生PWM信号驱动步进电机以控制步进电机旋转的速度、方向和角度,达到控制方向的目的;系统采用带有位置传感器的电动推杆控制 HST液压无级变速器调速实现对机组前进与后退速度的控制。电动推杆内部动力采用直流电机,并置电位器位置传感器,中央处理器通过PWM信号驱动直流电机的驱动模块使之控制电动推杆的运动,并且通过处理器自带的 A/D转换功能实时检测位置传感器的信号,确定电动推杆的位置,从而实现对主变速器的精确控制。
2 电路设计
2.1 中央处理器系统电路
中央处理器选用STC12C5A60S2单片机。该单片机为增强型8051单片机,单时钟/机器周期,工作电压为3.5~5.5 V,工作频率0~35 MHz,32 K的ROM和1.28 K的SRAM,内部集成MAX810专用复位电路和看门狗,具有2路PWM输出,10位精度A/D转换以及全双工异步串口[3]。单片机外围电路如图1所示。系统选用11.0592 MHz的晶振,利用MAX232实现TTL电平与RS232电平之间的转换,为单片机提供程序下载和调试接口。
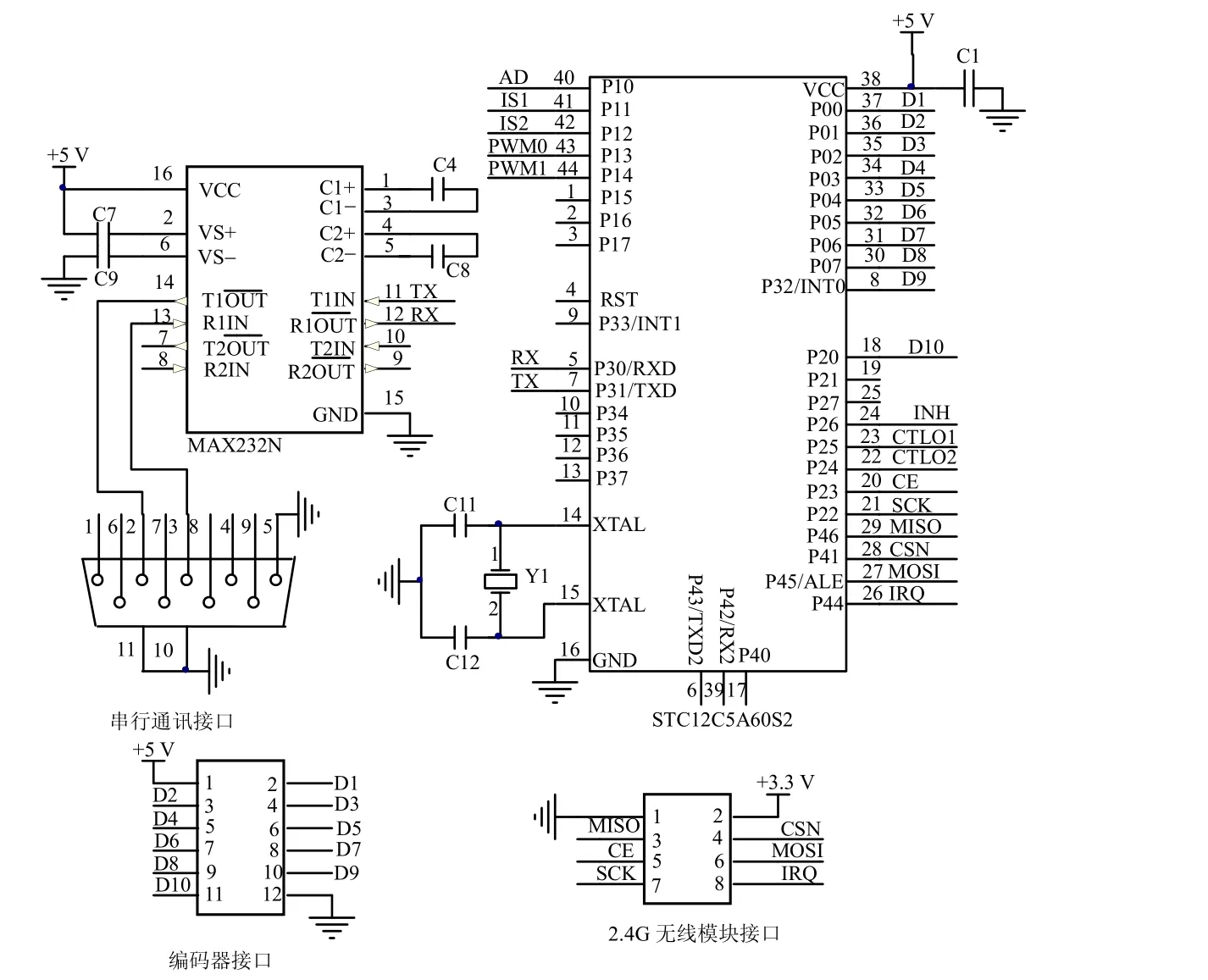
图1 中央处理器电路Fig.1 Circuit of central processing unit
为保证遥控距离和降低成本,无线通讯模块采用基于nRF24L01芯片的2.4G无线射频模块,通过与单片机 SPI接口进行数据交换。该通讯模块为 3.3V供电,有增强型SchockBurstTM模式控制器,能自动重发丢失数据包和自动产生应答信号,遥控距离约为100 m,传输速率最大为2 Mbps,空中传输时间很短,极大地减少了无线传输中的数据碰撞现象[4]。
编码器选用欧姆龙的绝对式编码器(5 V供电),采集精度为0.5度,编码器的输出为格雷码输出[5]。单片机直接读取编码器输出的格雷码值,经过程序转换后即可得到角度信息。
2.2 速度控制电路
插秧机 HST液压无级变速器采用电动推杆来控制,为使控制精确平稳,HST变速器要求电动推杆能够以微小的伸缩量来对其控制;因此,系统利用单片机产生的PWM信号对其控制。电路原理如图2所示。主要由2个BTS7970B直流电机驱动芯片和CD4052多路复用及模拟开关芯片组成。2个BTS7970B芯片组成了1个全桥驱动电路,单片机通过给INH引脚高电平来使能2个芯片[6]。CD4052则根据选通的通道[7]将PWM脉冲送入到IN1或IN2中,这样就能实现改变桥式电路中电流的流向,从而能够控制电动推杆的伸缩。电动推杆自带电位器式位移传感器,系统利用单片机内部自带的 10位A/D转换器直接采样得到电动推杆的位置信息。
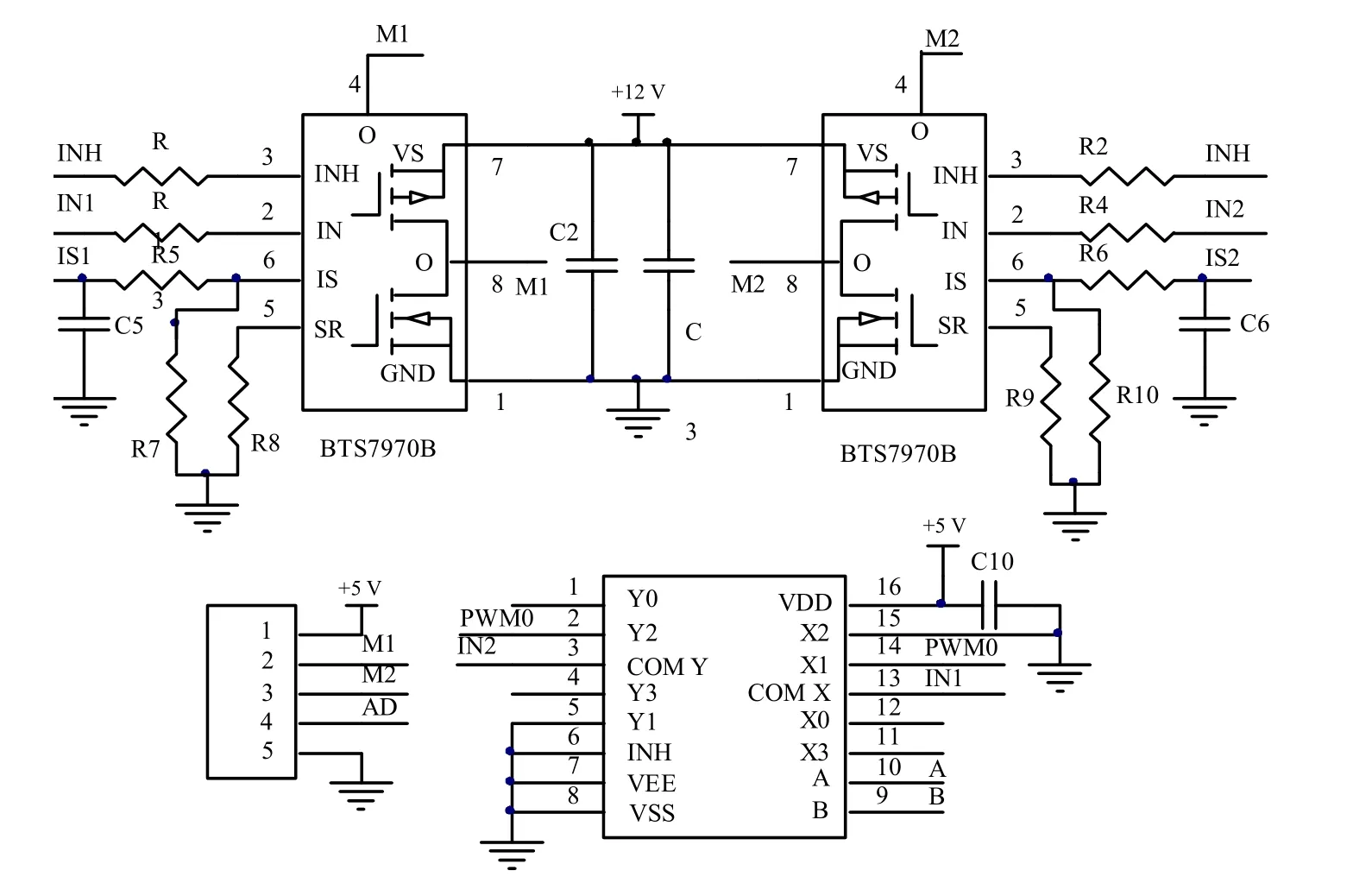
图2 速度控制电路Fig.2 The controlling circuit of speed
2.3 点火/熄火模块电路
发动机启动包括3个步骤,首先要接通发动机点火系统的电路,再接通启动系统的电路,最后发动机启动后还要将启动系统的电路及时断开[8]。如图3所示,电路中主要元件为PC817光耦芯片和2个继电器 Delay1和 Delay2。利用光耦可将外界电路与单片机电路隔离,提高了系统的控制性能和可靠性。电路中Delay1用来控制发动机的点火系统电路的开关,而Delay2则用来控制发动机启动系统的电路开关。系统控制时首先通过单片机控制使光耦导通,继电器的常开端口吸合,接通发动机的点火系统电路,延时约1 s后接着单片机接通Delay2启动发动机,Delay2接通延时约2 s后立即切断启动系统电路,防止损坏启动电机。
STC12C5A60S2单片机在上电复位时普通的I/O口为弱上拉高电平输出,当硬件系统上电时可能误动作导通光耦芯片,从而接通继电器导致发动机点火启动,为了防止这种情况的发生,电路中设置了下拉电阻R14和R19。由于单片机内部为弱上拉,上拉能力有限,而外部的下拉电阻很小,无法将单片机的I/O口拉高,防止出现误动作。当要将此下拉的I/O口配置为高电平时,只需要在软件中配置I/O口为强推挽输出,就很容易将I/O口拉高[2]。为延长光耦的使用寿命,给光耦加了限流电阻。在继电器线圈两端并联了1个续流二极管,防止在断电瞬间继电器线圈产生的感应电流击穿光耦芯片。同时,为防止意外,在点火系统电路与启动系统电路的公共端安装有急停开关,用于紧急断电熄火,以提高整个系统的安全性。
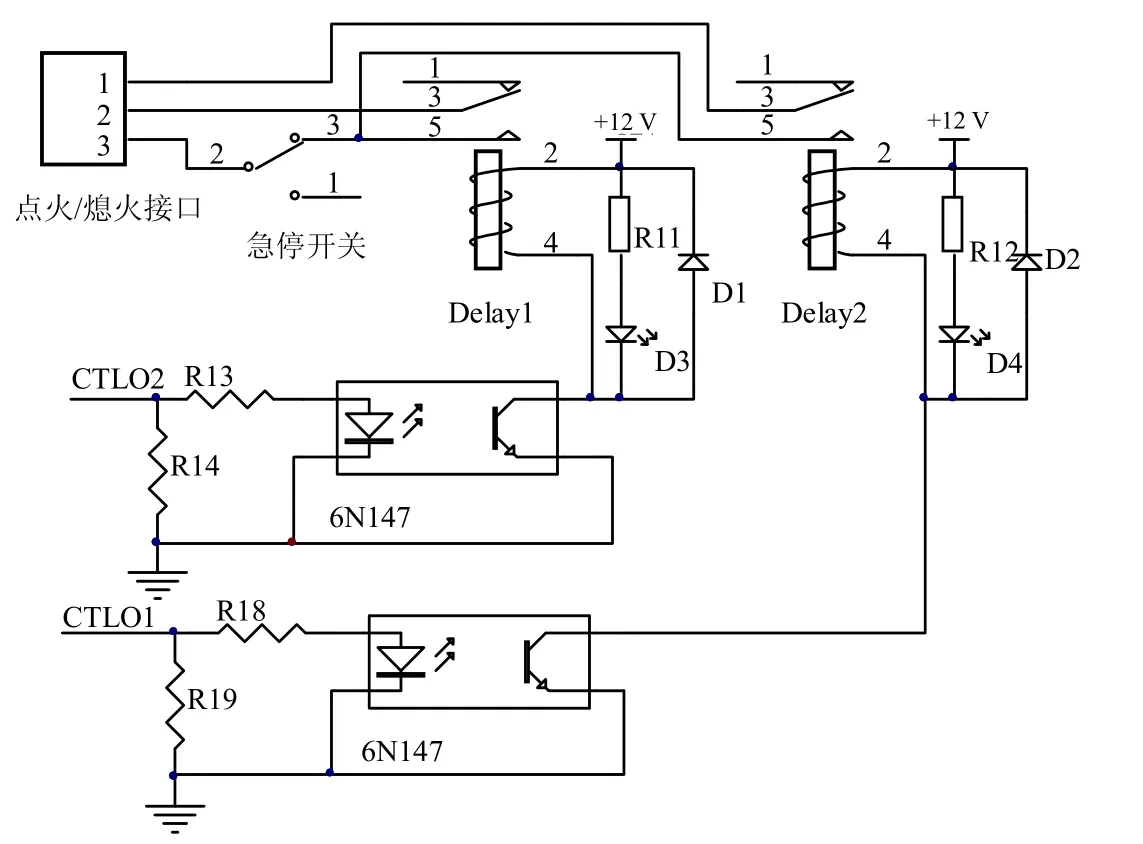
图3 点火/熄火电路Fig.3 Circuit of ignition/flameout
3 软件设计
上位机软件采用VisualBasic.net2008[9]开发,下位机软件则直接控制各个执行模块。下位机软件为实现对转向和速度的精确控制,采用模糊控制算法。
3.1 档位与方向盘模糊控制
遥控驾驶系统对于方向盘与档位2个闭环系统的控制均采用模糊控制算法[10-11]。
1)方向盘模糊控制系统。为提高控制精度,选用二维模糊控制系统,模糊控制系统原理如图 4所示。模糊控制系统的核心是模糊控制器,系统总输入目标转角R。模糊控制器首先将输入的角度偏差e和角度偏差变化率 ec=de/dt进行模糊化,根据设计的模糊规则进行模糊推理,并将模糊推理的结果通过模糊判决进行解模糊后输出1个值[12],将此值乘上系数 ku后即能得到控制步进电机的脉冲频率 u。步进电机是整个模糊控制系统的控制对象,模糊控制系统的监测反馈部件是绝对式的编码器,系统通过实时监测编码器的输出来提取模糊控制器的输入参数e和ec。
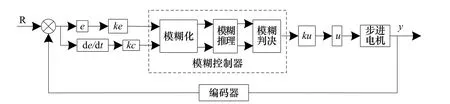
图4 方向模糊控制Fig.4 The fuzzy control of direction
2) 模糊控制策略设计。将模糊控制器的输入参数e和ec以及输出值u分别通过系数 ke、kec、ku量化后得到各自的离散论域[11],都为{-3, -2, -1,0,1,2,3},选定各离散论域上的模糊子集都为{NB,NS,ZR,PB,PS}:根据系统输出的角度偏差及角度偏差的变化趋势来消除误差的原则,利用模糊条件语句建立控制规则[12],如表1所示。
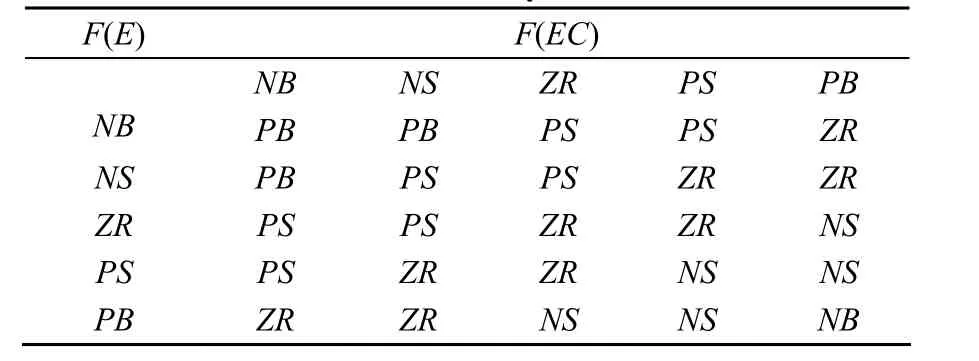
表1 模糊规则推理表Table 1 Fuzzy rule
3) 模糊控制系统输出。在角度偏差e∈[-0.523,0.523],角度偏差变化率ec∈[-0.262,0.262]和PWM信号频率u∈[-356,356]的情况下,根据模糊规则,经计算得到模糊系统的输出查询表,如表2所示[12]。
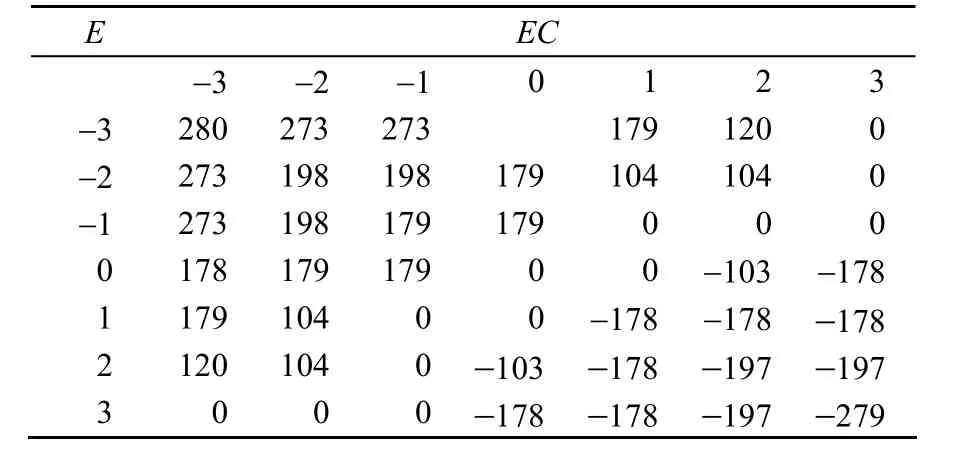
表2 模糊输出表Table 2 Fuzzy output value
模糊控制器程序通过中央处理器来执行,处理器通过采样编码盘的数据并将其模糊化,然后进行模糊推理和精确输出等过程。处理器在执行模糊推理程序后,根据最大隶属度原则得到EC和E值,查询表2中对应的数值即为从单片机的I/O口输出对应的PWM脉冲频率,从而控制步进电机的转动速度和转动方向,达到控制方向盘转向的目的。
3.2 下位机软件设计
系统启动后要进行电路系统的初始化,包括通讯端口、I/O口等初始化工作;完成后系统自动将HST变速器档位和方向盘进行归中,然后等待上位机的控制命令。通常情况下,上位机在工作时按照通讯协议发送控制命令[13],当没有下发控制命令时,为了保证系统的安全性和可靠性,上位机会每隔0.2 s自动下发1个心跳数据包,用来确认通信质量。在下位机软件中设置了超时退出功能,当现场的通讯质量不佳或通讯中断时,下位机在0.6 s内接收不到上位机发出的任何数据包时,即判断为通讯故障,为安全起见,系统将自动执行发动机熄火停机命令。
4 试验与结论
遥控系统完成后安装在插秧机上进行检验。结果表明,在供电充足、无无线电干扰的情况下,系统的可靠遥控距离可达100 m,对方向盘和HST档位的控制稳定,输出平稳,无抖动现象。当遥控距离超过110 m后,无线通讯开始出现中断的情况,系统变得不稳定。
[1]長阪善禎.自動行走田植機の開發[J].農業機械學會誌,1999,61(6):179-186.
[2]胡炼,罗锡文,张志刚,等.基于CAN总线的分布式插秧机导航控制系统设计[J].农业工程学报,2009,25(12):88-92.
[3]宏晶科技.STC12C5A60S2系列单片机器件手册[EB/OL]. (2011-07-05). http://www.stcmcu.com/.
[4]NORDIC SEMICONDUCTOR.nRF24L01 Single Chip 2.4GHz Transceiver Product Specification[EB/OL]. (2007-08). http://www.corelabs.cn/shared_folder/CORELabs_PROJECTS/ RF-Link/nRF24L01.pdf.
[5]OMRON.E60C3-A编码器技术指南[EB/OL]. (2011-09-01). http://img20.gkzhan.com/5/20110901/63450432 2236680279.pdf.
[6]INFINEON.BTS7970B Datasheet[EB/OL]. (2006-05).http://www.infineon.com/dgdl/BTS7970B_Datasheet.pdf?folderId=db3a304412b407950112b408e8c90004&fileId=db3a304412b407950112b43949b36d61.
[7]FAIRCHILD SEMICONDUCTOR.CD4052BC Datasheet[EB/OL]. (2000-08). http://www.datasheet5.com/preview_3447954_pi_1.html.
[8]范迪彬.汽车构造[M].上册.合肥:安徽科学技术出版社,2000:208-228.
[9]伊夫杰,郝利斯.Visual Basic 2008高级编程[M].5版.北京:清华大学出版社,2009:514-623.
[10]党建武.模糊控制技术[M].北京:中国铁道出版社,2007:87-150.
[11]蒋蘋,胡文武,罗亚辉,等.基于模糊算法与3σ法则的比例遥控系统研究[J].湖南农业大学学报:自然科学版,2009,35(3):325-328.
[12]王立新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2003:70-90.
[13]蒋蘋,胡文武,孙松林,等.水田作业机械遥控系统设计[J].农机化研究,2009(6):62-68.
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
南方农机(2022年23期)2022-12-01 09:07:14
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
设备管理与维修(2018年15期)2018-11-08 06:14:50
设备管理与维修(2018年8期)2018-08-13 12:09:14
数学大王·低年级(2017年9期)2017-09-18 18:33:13
中国核电(2017年1期)2017-05-17 06:10:00
湖南农业(2016年3期)2016-06-05 09:37:35
小天使·一年级语数英综合(2014年7期)2014-06-26 14:45:18
湖南农业(2013年12期)2013-04-07 22:41:34