航空显示信号测试中的笔划数据处理
2012-06-07 01:35:02丛林虎顾佼佼王昌金
电光与控制 2012年1期
张 彤,丛林虎,顾佼佼,丛 晋,王昌金
(1.海军驻洛阳407厂军事代表室,河南 洛阳 471039; 2.海军航空工程学院,山东 烟台 264001)
0 引言
在最新一代的战斗机航空显示中已基本采用纯光栅显示方式,但目前正在服役的多数机型仍使用光栅笔划叠加画面显示器。文献[1]中利用光栅笔划信号的时序关系,将光栅笔划叠加信号分解成为可由通用仪器产生与测量的分量信号。从而摒弃了传统的专用设备检测思路。这种方法在采集笔划画面各路信号时,由于仪器自身及外界干扰等因素的影响,从设备采集得到的数据一般都包含大量的噪声,从而在测控计算机上复现纯笔划画面及光栅笔划叠加画面时,由于采集得到的笔划信号数据未进行过预处理,致使显示的画面不够清晰美观并影响了识别、测试等后续工作的开展。因此,为了更加真实清晰地复现出笔划画面,有必要对采集后的笔划信号进行处理,即通过一系列预处理方法降低采集后的笔划信号中的噪声水平,从而为后续工作的开展提供更为可靠的信号数据集。
1 光栅笔划叠加显示方式
海空作战中,战斗机飞行员主要通过平视显示器和多功能显示器来获得飞机与作战信息。这些信息是通过光栅和笔划这两种扫描机制完全不同的信号组合产生并叠加显示的[2]。光栅笔划显示器由工作模式和光栅笔划切换信号(S/R)控制,既可工作于纯笔划方式、纯光栅方式,又可以工作于光栅笔划叠加显示方式。当显示器工作于光栅笔划叠加显示方式时,显示器在光栅笔划切换信号的控制下,在光栅视频信号的场消隐期间显示笔划信号,其他时间显示光栅信号。这样用户在屏幕上看到的就是笔划视频画面叠加在光栅视频画面上的叠加画面[3]。
光栅视频信号、偏转信号、颜色信号、光栅笔划切换信号等要保持同步关系,逻辑关系如图1所示。

图1 笔划信号Fig.1 Stroke signal
对单色多功能显示器,则只有一个颜色信号或辉亮信号。在图1中,光栅视频场同步信号的下降沿表示视频信号要进入场消隐,即将显示笔划画面。光栅笔划切换信号的上升沿标示了一幅笔划画面的开始,下降沿标示了笔划画面的结束。在光栅笔划切换信号有效期间内,笔划的位置由偏转X和偏转Y信号确定,笔划颜色由笔划颜色R、笔划颜色G、笔划颜色B这3路信号共同决定。笔划画面绘制完成后继续显示光栅画面。
2 航空显示信号测试
2.1 测试基本原理
针对光栅笔划叠加画面显示信号及其逻辑关系的特点,同样考虑ATS的通用化原则,选择多通道并行数据采集模块、光栅视频采集模块、通信模块和相应电源模块来完成光栅笔划信号采集、复现、显示和测量的任务,如图2所示。
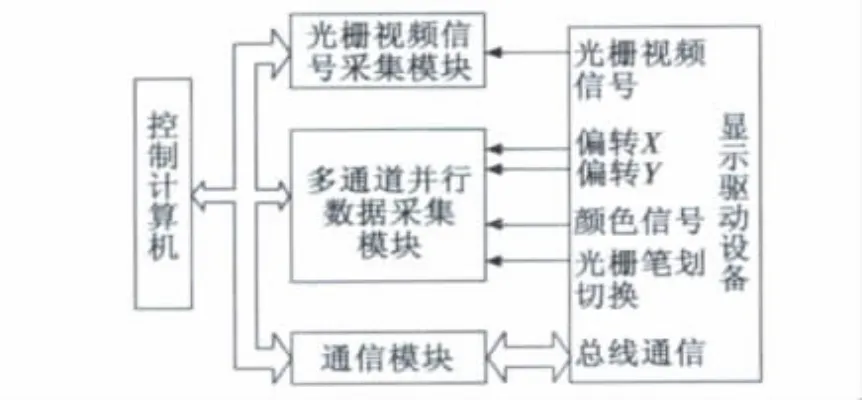
图2 测试系统总体设计Fig.2 Design of the test system
控制计算机控制光栅视频采集模块采集光栅视频信号,控制多通道并行数据采集模块采集其他分量信号,然后根据光栅笔划信号各分量信号之间的时序关系复现、显示光栅画面、笔划画面和光栅笔划叠加画面。通信模块则用于模拟有通信功能的多功能显示器,完成与显示驱动设备之间进行的设置工作方式、查询周边键状态等通信功能[4]。
2.2 信号采集和显示
对光栅视频信号,直接采用视频信号采集模块进行采集,将视频画面保留在内存或保存在图像文件中。
对光栅视频场同步、光栅笔划切换、偏转X、偏转Y、颜色等信号,采用高速并行数据采集模块进行同步采集,每次采样时间大于两个视频信号场周期,保证能采集到一幅完整的笔划画面。在采样数据序列中,光栅笔划切换信号的上升沿标示了一幅笔划画面的开始,下降沿标示了笔划画面的结束。在笔划画面期间,偏转X和偏转Y信号确定了笔划的位置,颜色信号则表示笔划的颜色。根据各种分量信号之间关系,利用软件将笔划画面叠加到保存的光栅视频画面或空白画面之上。先用最简单的画点方法将笔划画面叠加到光栅画面上。若在(X,Y)点,光栅笔划切换和颜色信号有效,则在保存的光栅画面上的相应位置上画一个点。如此这般将所有笔划上的点全部画在光栅画面上,就形成了一幅完整的光栅笔划叠加显示画面。也可采用分段画线的方法来显示笔划画面,即若在(X1,Y1)点到(X2,Y2)点光栅笔划切换和颜色信号均持续有效,则可将两点之间所有笔划上的点都画在光栅画面上且点与点之间用直线连接。叠加后的光栅笔划画面可直接在测控计算机屏上显示。
在光栅笔划叠加显示方式下,笔划信号在光栅视频信号的场消隐期间显示,光栅视频信号采用PAL制式,场频为50场/s,帧频为25帧/s,扫描线为625行,场消隐时间为几毫秒,故笔划信号的显示时间为毫秒级。一般飞机平显的分辨率为512*512,假设有一幅很复杂的笔划画面,在没有空笔移动的情况下,其画面占据了半个屏幕,则这幅笔划画面所占据的像素点为(512*512)/2,这些像素点要在场消隐期间显示完,则笔划信号的频率为几十兆。一般的笔划画面主要是字符、数字和表示航向、距离、高度等重要信息的特定技术符号,画面比较简单,其占据的像素点并不多,在毫秒级的场消隐时间相应的频率为几兆。则在实际采样过程中的采样频率要达到几十兆。
3 测试数据处理
3.1 测试数据分析
笔划信号主要由颜色信号及偏转信号组成。对单色多功能显示器,只有一个颜色信号或辉亮信号。彩色多功能显示器则包含笔划颜色R、笔划颜色G、笔划颜色B这3路信号。对彩色多功能显示器中3路颜色信号的处理可按照单色多功能显示器中辉亮信号的处理方法进行类似处理。
辉亮信号为RS422电平,该种电平采用差分传输(平衡传输)的方式。采用该种传输方式辉亮信号在采集过程中抗干扰能力强[5],对采集后的辉亮信号只需进行二值处理就基本能够消除噪声的影响并能达到时序的要求。
偏转信号为±5 V范围内的连续模拟信号,在采集过程中由于仪器自身及外界干扰等因素的影响,致使采集后的偏转信号有大量的噪声,笔划偏转信号的偏转精度高,噪声对其影响明显。若不对笔划偏转信号进行处理就直接利用这些数据进行笔划画面的复现,那么显示出的画面会模糊不清并影响图像识别、测试等后续工作的开展。笔划偏转信号频率分布不均,在辉亮信号消隐时的频率要高于辉亮信号有效时的频率,在采集过程中产生的噪声干扰一般分布在高频段,这就造成在进行滤波时对辉亮信号消隐段内笔划偏转信号的处理更加困难,由前文对笔划画面形成的分析可知,在辉亮信号消隐期内是不显示笔划的,因此可以考虑采用分段滤波的方法对偏转信号进行处理,即只对辉亮信号有效期内的笔划偏转数据进行滤波处理而不管辉亮信号消隐期内的偏转数据。对笔划偏转数据进行分段滤波处理,不仅节省了滤波时间而且还可以充分考虑每段偏转数据的特点从而使处理过程更有针对性,效果也会更好。
笔划各路信号之间存在着严格的时序和逻辑关系,这就要求在处理过程中要包含一定时频的信息,在传统的傅里叶分析中,信号完全是在频域展开的,不包含任何时频的信息,故若单单只使用低通滤波器、带通滤波器等简单的频域处理方法进行滤波则很容易就将大量有用的信息损失掉[6]。考虑到笔划画面显示的主要内容是字符、数字和表示航向、距离、高度等重要信息的特定技术符号,在显示这些字符、符号时,往往是按照其形状特征进行编程实现的,所以产生的用来确定笔划位置的偏转X、偏转Y信号数据前后联系紧密且变化缓和,故考虑使用空域滤波的方法对采集得到的笔划偏转信号进行处理。
综上所述,辉亮信号在采集过程中抗干扰能力强,对采集后的数据只需进行二值处理即可。笔划偏转信号受噪声影响明显,要进行预处理后才能用于笔划画面的复现。考虑到笔划画面的形成过程及笔划各路信号之间存在着严格的时序和逻辑关系,最终选用分段空域滤波的方法对笔划偏转信号进行处理。
3.2 Savitzky-Golay平滑滤波器
Savitzky和Golay提出的S-G平滑滤波器,又称最小二乘方法或数据平滑多项式滤波器。该滤波器通过将一个多项函数对信号进行逐个拟合,使含有噪声的信号变得平滑。通过该滤波器处理过的数据能够清晰地反映出数据的长期变化趋势以及局部的突变信息,且不受数据时间空间尺度和采集设备的限制。近年来,基于S-G滤波方法的NDVI时间序列重建取得了较好的效果[7]。现将该方法运用于对笔划偏转信号数据的处理。
S-G滤波的公式为

其中:Yj+i为原始笔划偏转信号数据序列中的第j+i位的值;为平滑过后序列中的第j位的数据值;m为滑动窗口中的单侧数据点数;Ci为从过滤器首部开始第i个笔划偏转信号数据值的权值;N为过滤器的长度,同时也可以表示为(2m+1)[8-9]。
因此S-G滤波器要人为设定两个参数:第一个是m;第二个是多项式拟合的阶数。通常m值越大结果越平滑,被平滑的峰谷值也就越多;多项式拟合的阶数一般设在2~4之内,较低的次数可以得到更平滑的结果,但会引进误差,较高的次数可以降低这个误差,但是可能过于拟合得到一个更多噪声的结果。
3.3 S-G平滑滤波方法改进
由于在采集笔划偏转数据过程中可能出现由于某些元件造成的异常点。因此,在使用Savitzky-Golay滤波算法对笔划偏转数据进行预处理之前,可以先采用3σ准则进行异常点检测[10],经过异常点检测后的数据集能更好的进行滤波。
3σ准则又称拉伊达准则,其数学方法如下:设样本数据为y1,y2,…,yn,平均值为,偏差为vi=yi-,(i=1,2,…,n)。计算出标准差为

如果某一样本数据yk的偏差vk(1≤k≤n)满足|vk|>3σ,则认为该数据不合理。
在笔划画面中出现的字符、符号形状不同,大小各异,复杂程度也有区别,这就使得对于每一个字符、符号其采集得到的数据量不同,因此,平滑窗口宽度不能为固定值。本设计采用动态的方法,即每次预处理采用的窗宽与需要处理的数据数量有关,根据数量的多少来确定窗宽。
3.4 数据处理流程
对笔划偏转数据进行分段处理后,首先进行异常点检测,具体算法如下:
3)计算ΔX中绝对值大于3×σ的数据点,认为是异常点,并删除;
4)对于被删除的异常点,用该点两侧的正常数据进行线性差值,并作为改点数据。
由于上述设计的多通道并行数据采集模块的采样率是固定的,每个点之间的时间间隔是相同的,即偏转X、偏转Y等数据对应的曲线的横坐标是均匀的,因此可以对其使用Savitzky-Golay法。综上所述采取下面的预处理算法:
1)对笔划偏转X、偏转Y数据进行异常点剔除;
2)对上一步处理的结果进行卷积平滑以消除噪声,可用Savitzky-Golay法求得,这里需要确定的参数是窗口半宽w和平滑多项式的阶数。
在进行滤波前,首先要确定窗宽及多项式的阶数。经过多次试取,可选取窗口半宽w=m,为数据点的1/30时效果最佳。笔划偏转数据变化比较缓和,分别采用一阶、二阶、三阶、四阶多项式进行处理,当多项式阶数定位三阶时效果最令人满意。
3.5 数据处理效果
下面通过一个仿真实验来检测一下数据预处理的效果。本实验利用LabView软件,根据笔划信号的时序关系产生出3路信号数据,即偏转X、偏转Y和辉亮信号,并将这3路信号数据分别保存在3个文件中。在产生过程中人为地进行均匀白噪声干扰,目的是模拟在实际采集过程中由于仪器自身或外界干扰等因素造成的噪声。每路信号数据长度为100 kB,笔划偏转电压±5 V。
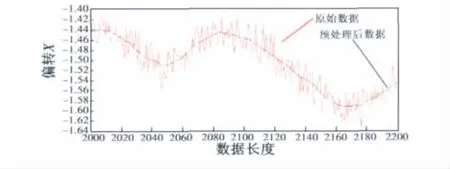
图3 偏转X处理前后对比Fig.3 The effect of deflection X processing
通过LabView读取这3个包含噪声的数据文件,采用分段画线的方法显示出由这3路信号数据形成的笔划画面,即若在(X1,Y1)点到(X2,Y2)点辉亮信号持续有效,则可将两点之间所有笔划上的点都显示出来且点与点之间用直线连接。在读取这3个包含噪声的数据文件进行笔划画面复现时,为使显示出来的笔划画面更加真实清晰,就有必要在显示前先对这3路信号数据进行预处理。采用上述算法对笔划数据进行处理,预处理前后偏转X和偏转Y的坐标数据对比如图3、图4所示。可以看出,使用本设计的预处理算法,可以有效地将噪声去除。
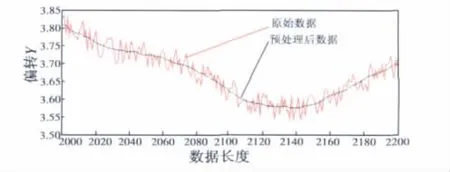
图4 偏转Y处理前后对比Fig.4 The effect of deflection Y processing
若直接读取上述产生的3个文件而不对其进行预处理,则显示如图5。图5的显示效果与真实采集笔划数据在测控计算机上显示的效果十分相似,故若通过数据处理能使图5的显示效果改善,那么在实际应用中此种预处理算法也会有很好的效果。预处理前后该笔划画面的示意图对比,如图5、图6所示。经过本设计的预处理方法,显示效果明显好于以前。
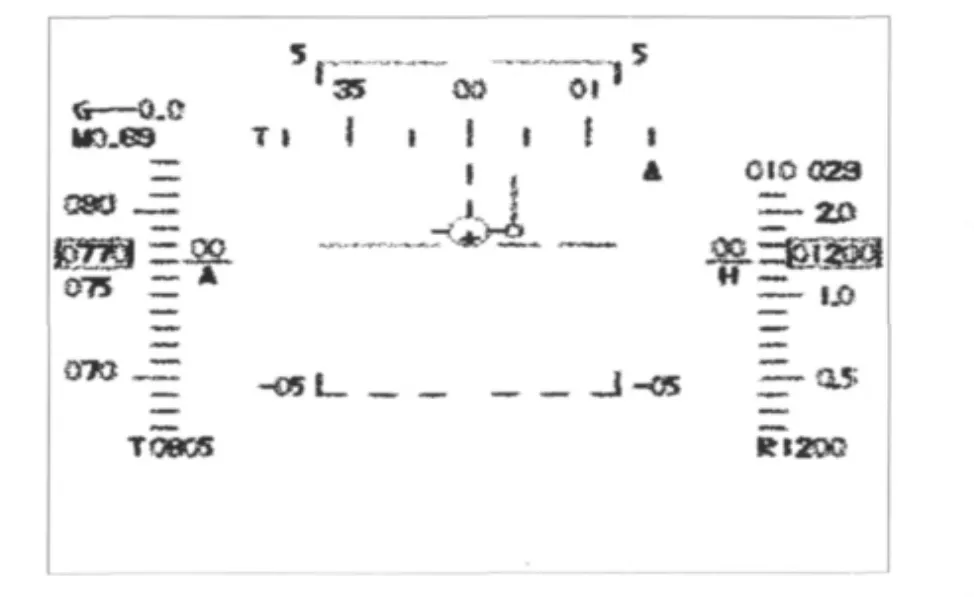
图5 预处理前的画面示意图Fig.5 Schematic diagram before preprocessing
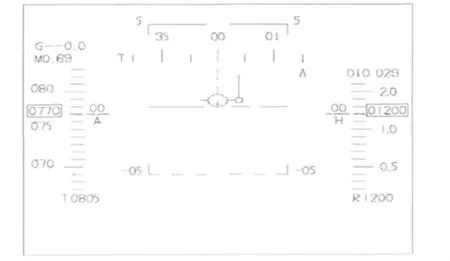
图6 预处理后的画面示意图Fig.6 Schematic diagram after preprocessing
4 结束语
在进行数据处理时,先根据辉亮信号的逻辑状态,对采集得到的笔划偏转信号数据进行分段,通过分段只对辉亮信号有效期内的笔划偏转数据进行处理。采用3σ准则进行异常点检测,经过异常点检测后的数据集能更好地进行滤波。在此基础上根据航空显示信号中笔划信号各分量之间严格的时序关系及笔划偏转信号频率分布特征,采用Savitzky-Golay动态滤波。仿真实验结果表明,采用该算法可以消除采集笔划偏转信号时大部分噪声的干扰,同时该方法原理简单,易于编程实现。该方法在对笔划信号进行去噪时,相当于去除了笔划信号在产生时附带的和采集过程中由于仪器及外界干扰产生的两部分噪声,若只想单单去除仪器及外界干扰的噪声,则需进一步讨论。本文设计的算法同样适用于其他信号数据的预处理,例如其对手写系统中由手写输入设备采集得到的原始数据的处理也有令人满意的效果。
[1]王昌金,高波,孙瑾,等.ATS中的光栅笔划信号产生和检测技术[J].电光与控制,2005,12(5):45-49.
[2]刘海见,杨健.航空显示信号自动测试技术研究[J].测控技术,2005,24(9):76-78.
[3]张兴义.电子显示技术[M].北京:北京理工大学出版社,1995:42-50.
[4]WANG C J,SHEN T S,ZHOU X D.The stroke and raster dislay signal generator in automatic test equipment[C]//Proceedings of ISTM,2003.
[5]程佩青.数字信号处理教程[M].北京:清华大学出版社,2008:323-370.
[6]刘文耀.数字图像采集与处理[M].北京:电子工业出版社,2007:91-100.
[7]李航燕,颉耀文.时序NDVI数据集重建方法评价与实例研究[J].遥感技术与应用,2009,24(5):596-602.
[8]SAVITZKY A,GOLAY M J E.Smoothing and differentiation of data by simplified least squares procedures[J].Analytical Chemistry,1964,36:1627-1639.
[9]CHEN J,PEN J,MASAYUKI T,et al.A simple method for reconstructing a high-quality NDVI time-series data set based on the savitzky-golay filter[J].Romote Sensing of Environment,2004,91:332-344.
[10]BOUVERESSE E,MASSART D L.Improvement of the piecewise direet standardization procedure for the transfer of NIR spectra for multivariate calibration[J].Chemometrics and Intelligent Laboratory Systems,1996,32(2):201-203.
猜你喜欢
科学大众(2021年9期)2021-07-16 07:02:46
电子制作(2019年24期)2019-02-23 13:22:32
电子测试(2018年13期)2018-09-26 03:29:36
小学阅读指南·低年级版(2016年10期)2016-09-10 07:22:44
高师理科学刊(2016年8期)2016-06-15 20:27:46
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:41
科技创新与品牌(2015年10期)2015-10-27 18:43:24
物理与工程(2014年4期)2014-02-27 11:23:08
图学学报(2013年4期)2013-09-25 02:58:22
物理与工程(2011年1期)2011-03-25 10:02:44