无人机遥感数据记录系统设计与实现*
2012-06-07 01:51黄克明张明义赵温波刘发磊
舰船电子工程 2012年10期
黄克明 张明义 赵温波 刘发磊
(解放军陆军军官学院 合肥 230031)
1 引言
近年来,以无人机为飞行平台携带数码相机或成像光谱仪进行低空遥感航拍技术越来越受到重视,发展迅速。该技术可广泛应用于国防军事、低空遥感、资源勘探、森林消防、水源检测、电力巡线、灾害评估、人员搜救等各个领域,经过多次实践检验,其应用效果受到广泛赞誉[1~3]。
无人机遥感航拍摄正射影像图时,要求航拍相机的CCD感光面必须与地面保持平行,即相机拍摄到照片的中心点的坐标和航拍相机CCD感光面坐标保持一致。同时要求同步获取成像时的六种外方位(POS)数据[4~5],包括三轴姿态、三维位置等,为航拍后期图像的校正、融合、拼接等处理提供基础数据。由于中小型无人机载荷能力限制,航拍相机与量测型相机在拍摄方式和后期处理上都与传统的航空摄影测量有所不同[6~8],无法直接提供POS数据。针对目前的实际状况,通常这些数据由无人机载飞控计算机间接提供。由于无人机的位置和姿态传感器安装位置距离相机较远、相机安装时存在角度偏差等原因,飞控计算机给出的POS数据并不能精确反应出曝光时相机的实际位置和姿态,因此会极大影响后期的图像处理。
针对上述问题,本文研究利用ARM为核心控制处理器,通过在遥感航拍相机上设置姿态、位置传感器,在控制相机曝光同时,同步记录其POS数据,实现图像和POS数据的严格对应,为后期的图像拼接处理提供同步数据。
2 无人机遥感数据记录系统硬件设计[9~10]
无人机遥感数据记录系统硬件方案如图1所示。系统组成主要包括航拍相机接口、航拍控制指令输入接口、GPS模块、航姿仪(AHRS)模块、数据处理模块、数据存储模块、通信模块、航拍云台接口以及电源模块。
数据处理模块以意法半导体(ST)的STR711微控制器为核心[11]。STR711是片上集成Flash和RAM的微控制器。它基于高性能的ARM7TDMI内核,该系列中的所有器件都包含片上高速单电压Flash存储器和高速RAM存储器。由于内嵌ARM内核,所以STR71x与所有的ARM工具和软件兼容。由于STR71x拥有丰富的外设和增强的I/O功能,共有四个串口,完全满足本系统应用需求。
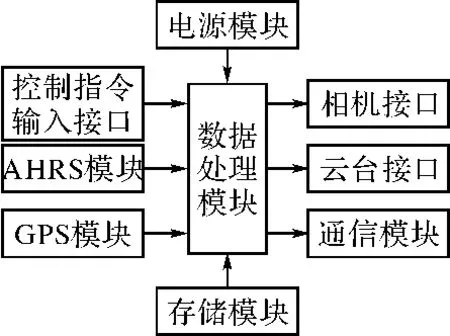
图1 系统组成
航拍指令输入接口接收无人飞行器或遥控接收机指令并识别,判断是否开始拍摄或停止拍摄;航拍相机接口输出PWM信号给航拍相机按照设定的拍摄时间间隔进行拍摄或停止拍摄;可在飞行前根据具体飞行速度和高度预先设定控制航拍相机曝光时间间隔。AHRS和GPS测量航拍相机的三维位置经度、维度、高度、速度、俯仰角、横滚角和航向角以及工作时间等参数并把测量的数据通过串口传输到数据处理模块;控制相机曝光时,数据处理模块根据AHRS和GPS模块提供的相机姿态位置数据,一方面通过板载存储模块进行实时存储,另外通过伺服云台接口控制相机,使相机始终处于正射状态;电源模块为系统各模块提供稳定电源。系统也可通过通信模块接受曝光控制时间、曝光间隔等参数,也可输出相机曝光的各种POS参数。
3 无人机遥感数据记录系统软件设计
无人机遥感数据记录系统软件采用C语音编写,软件流程如图2所示。
系统加电以后进行初始化,包括系统初始化,SD卡文件系统初始化,GPS和AHRS初始化。初始化完成以后,数据处理模块获取GPS和AHRS数据,计算俯仰和横滚角偏差,并输出偏差给航拍云台,驱动云台使相机轴心向下垂直成正射状态。当航拍指令输入接口接收到指令后,数据处理模块判断是否是航拍相机曝光指令。如果不是,则继续等待;如果是,则获取曝光时间间隔设置,通过航拍相机接口输出曝光指令到航拍相机快门,控制相机快门按设定间隔曝光,同时记录曝光的序列、时间、位置、速度、姿态等外方位数据,并写入SD存储模块进行存储。当接收到停止曝光指令后,则停止相机曝光,程序结束,否则返回。
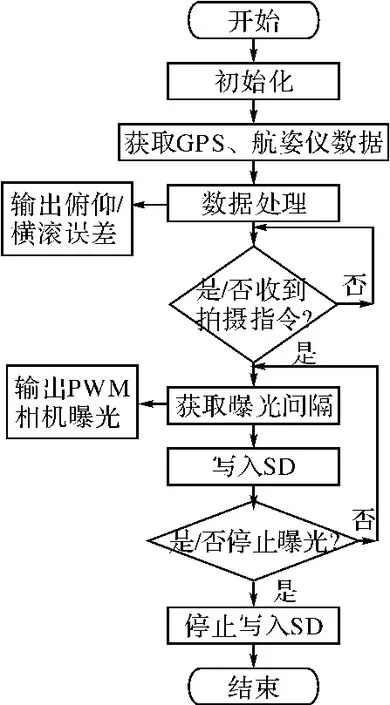
图2 程序流程图
4 系统实现及试验
采用上述设计后,最终无人机遥感数据记录系统实物如图3所示。
系统具备以下功能:
1)可利用遥控接收机一个通道连接接收机,自动识别接收机遥感拍摄信号。
2)可利用一个开关通道连接自动驾驶仪,利用地面站通过自动驾驶仪控制航拍,距离更远。
3)可利用无线数传电台串口直接发送航拍控制信号给控制器,控制内容包括拍摄指令、时间间隔等,控制器可利用串口自动向地面送航拍数据。
4)按设定控制遥感航拍相机接进行拍摄;根据具体飞行速度和高度设定拍摄时间间隔:预设8个,分别是1/3、1/2、3/4、1、1.5、2、2.5、3s。
5)控制器通过快门连接线和遥感航拍相机相接相连。

图3 系统实物图
6)标准遥感数据包括:航片序列、拍摄时间、经度、纬度、高度、俯仰角、横滚角、航向角,为遥感航片后期处理提供全部数据。
7)遥感数据可利用板载存储模块SD卡存储,也可利用串口直接传输到地面站。
8)利用控制器姿态传感器反馈数据控制遥感云台、使遥感航拍相机始终处于正射状态,为遥感应用提供高质量航拍和航测数据,方便后期数据处理。
2011年10月在安徽滁州地区进行了多次无人机机载实际飞行试验,验证了无人机遥感数据记录系统性能,图4为部分试验图片,表1为部分试验数据。

图4 部分遥感航拍试验图像

表1 试验记录数据
5 结语
本文提出了一种小型无人机遥感数据记录系统设计方案,系统可接受遥感航拍控制指令,调整航拍云台处于正射姿态,控制相机按设定曝光间隔进行曝光,同时利用GPS模块、AHRS模块获得相机曝光时的序号、时间、位置、姿态等数据并存储,为航拍后期图像处理提供必要的POS数据。本文设计无人机遥感数据记录系统体积小,重量轻,接口简单,5V供电,非常适合无人机等无人飞行器低空遥感航拍使用。
[1]秦博,王蕾.无人机发展综述[J].飞航导弹,2002(8):4-10.
[2]秦明,朱会,李国强.军用无人机的的发展趋势 [J].飞航导弹,2007(6):36-38
[3]臧克,孙永华,李京,等.微型无人机遥感系统在汶川地震中的应用[J].自然灾害学报,2010(3):162-166.
[4]崔红霞,林宗坚,孙杰.无人机遥感监测系统研究[J].测绘科学,2005(5):11-14.
[5]晏磊,吕书强,赵红颖,等.无人机航空遥感系统关键技术研究[J].武汉大学学报,2004(12):67-70.
[6]吕书强,晏磊,张兵,等.无人机遥感系统的集成与飞行试验研究[J].测绘科学,2007(1):84-85.
[7]方红,卫张耀.POS系统辅助航空摄影应用初探[J].科技信息,2008(26):252-254.
[8]冯文颧.近景摄影测量物体外形与运动状态的摄影法测定[M].武汉:武汉大学出版社,2002:88-91.
[9]张扬,周波.无人机航空遥感相机控制系统的设计[J].科协论坛,2004(4):103-104.
[10]曹宁翔,李媛华,邓云华,等.基于单片机的相机控制仪研制[J].仪器仪表学报,2006,27(6):257-259.
[11]余子全,赵思齐,曹奇英.基于STR71X的记录存储系统的设计与实现[J].微计算机信息,2008(11):125-127.
猜你喜欢
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
建材发展导向(2021年12期)2021-07-22
数学小灵通(1-2年级)(2020年11期)2020-12-28
时代邮刊·下半月(2020年9期)2020-09-23
小学生学习指导(低年级)(2019年3期)2019-04-22
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
电子制作(2017年20期)2017-04-26
陕西画报(2017年1期)2017-02-11