基于FPGA多轴控制的SVPWM信号实现设计
2012-06-02 05:31俞小露徐抒岩曹小涛
电机与控制应用 2012年7期
俞小露, 徐抒岩, 曹小涛, 胡 君
(1.中国科学院长春光学精密机械与物理研究所,吉林长春 130033;
2.中国科学院研究生院,北京 100039)
0 引言
脉宽调制(Pulse With Modulation,PWM)方法因控制简单,灵活和动态响应好,现已广泛应用于电气传动领域,实现PWM的技术主要有:相电压控制PWM、PWM法、随机 PWM、SPWM 法、线电压控制PWM等。20世纪80年代中期提出的空间电压矢量脉宽调制(Space Vector Pulse With Modulation,SVPWM),其在变频调速方面更具优势,采用逆变器空间电压矢量的转换得到接近圆形的旋转磁场,较好的减小逆变器输出电压谐波成分,使得输出电压的动态性能更好,且直流电压利用率提高约15%,相同波形输出的情况下开关损耗降低约30%[1-2]。SVPWM技术已成为变频调速以及运动控制领域的热点话题,有取代传统SPWM的趋势。
目前主要的SVPWM的实现方法是使用含有SVPWM硬件模块的DSP,结合相关软件的方法,但这种方法只能产生特定通道数的PWM信号,不能满足多轴控制的需要[3],占用较多的CPU资源,加重DSP负担,不利于运算,而且传统的DSP在处理数据量大、速度快、高实时性和高可靠性的底层算法方面不占优势。本文在对SVPWM的原理进行分析的基础上,给出了一种基于APA600芯片的控制方案,完成实时可靠的多轴控制的PWM信号输出。
1 SVPWM原理
三相电压源逆变器电路中,SA、SB、SC为逆变器桥臂的开关,设置开关函数SK:SK=1(桥臂K,上臂导通,下臂关断);SK=0(桥臂K,上臂关断,下臂导通),如图1所示。由SA、SB、SC的不同开关组合,可以有八个开关矢量(SaSbSc),即U0(000)~U7(111),其中U0和U7开关状态下逆变器输出空间电压矢量为零,称为零矢量。其他六个矢量称为有效矢量[4]。
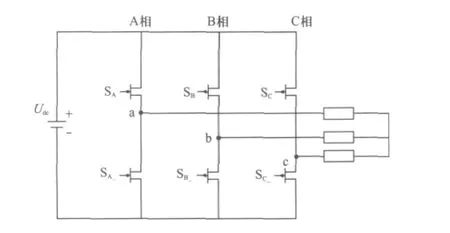
图1 电压型三相逆变器示意图
三相逆变器输出的线电压矢量[UabUbcUca]T与开关状态矢量[SaSbSc]T的关系为
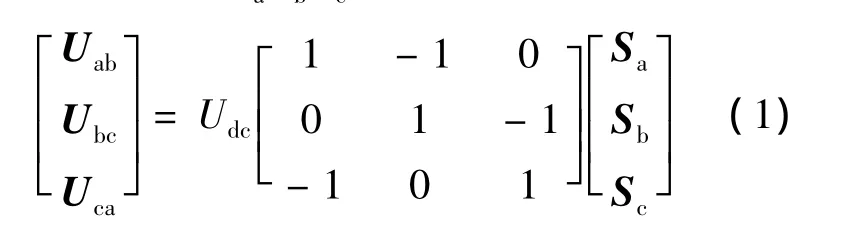
三相逆变器输出的线电压矢量[SASBSC]T与开关状态矢量[SaSbSc]T的关系为
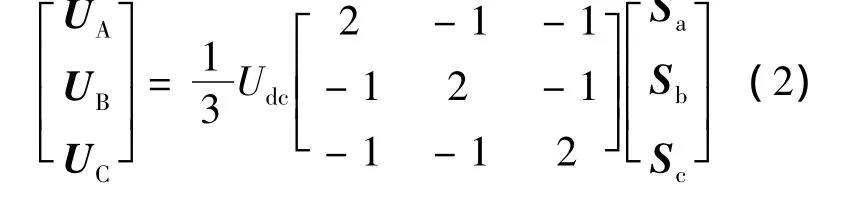
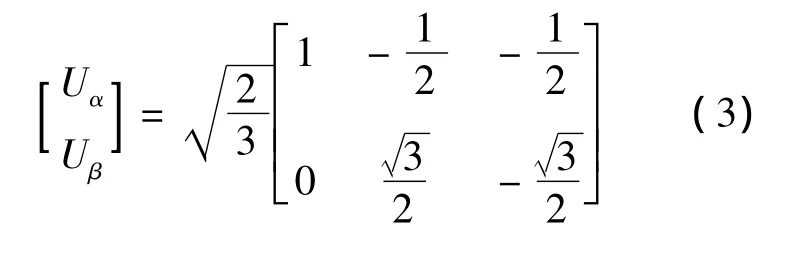
式(1)和式(2)中Udc是直流电源源电压,电压值对应的是三相ABC平面。为了在程序中计算的方便,需要将线电压和相电压变换到αβ平面直角坐标系中,选择α轴与A轴重合,β轴超前α轴π/2,根据在不同坐标系中的总功率不变的转换原则,在三相ABC坐标系中的相电压转换到αβ平面直角坐标系为
当逆变器输出有效空间电压矢量U1时,电机的磁链矢量矢端从A点向B点移动,若在运动到B点时,逆变器改输出有效空间电压矢量U2,则相应的电机磁链矢量的矢端从B点向C点移动。当6个有效空间电压矢量依次独立输出后,电机磁链矢量的运动轨迹形成一个正六边形的旋转磁场,如图2所示。正多边形的边数越多就越趋近于圆形磁场。
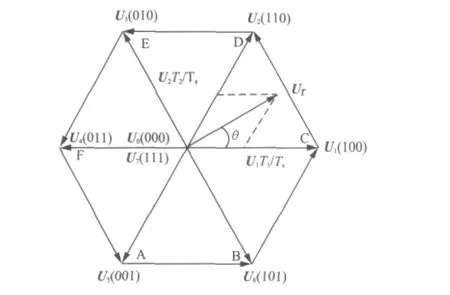
图2 SVPWM扇区和电压合成示意图
一个幅度固定的匀速旋转的空间电压矢量,在三相空间A、B、C轴上的投影是对称正弦变量。由于逆变器实际所产生的矢量(零矢量和有效矢量)个数有限,不可能产生角度连续变化的空间矢量。为了获得旋转的电压矢量,只能利用逆变器实际产生矢量的作用时间不同来等效合成近似旋转电压矢量[2]。一个周期内合成的矢量越多,越接近连续旋转的空间矢量,同样开关频率越高。
以第Ⅲ扇区为例,用有效矢量U1、U2和零矢量合成目标矢量Ur,等效矢量按伏秒平衡原则合成。故有

式中:T1、T2、T0——分别是 U1、U2和零矢量的作用时间;
Ts——采样周期。
式(4)的意义是矢量Ur在Ts时间段内所产生的积分效果和 U1、U2及零矢量作用 T1、T2、T0时间的积分效果相同。这样每隔Ts时间,就改变相邻基本矢量的作用时间,并保证合成的空间矢量幅值不变,随着Ts的变化足够小,则,电压矢量的运动轨迹就近似圆形。
在图2中,根据三角形的正弦定理有[2]
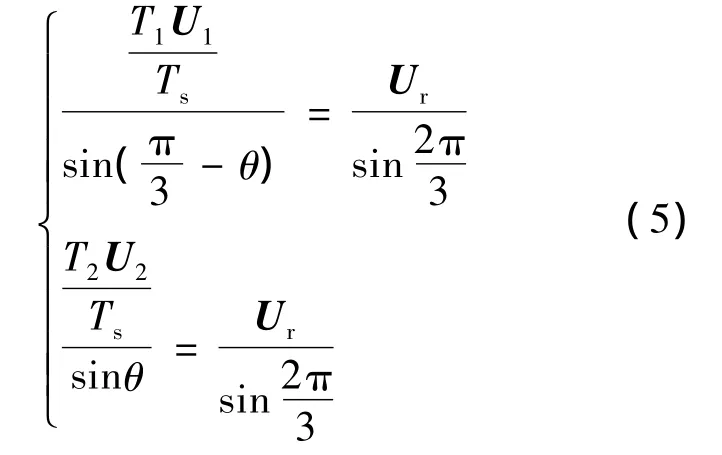
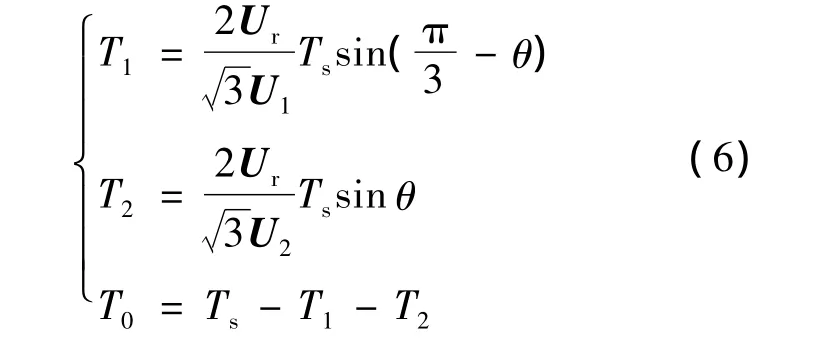
零矢量只是补充T1、T2以外的时间,对矢量的合成不产生影响,解式(5)可得
2 多轴SVPWM信号输出设计方案
一般来说,SVPWM算法分为以下几步:一是计算开关电压矢量作用时间;二是参考电压所在扇区的计算;三是根据开关作用时间合成三相SVPWM开关信号。
2.1 电压矢量作用时间的计算
式(6)引入了正弦函数,不利于FPGA的计算。为了在基本电压矢量作用时间的计算中避开正弦函数,需使用αβ坐标系下的两相电压来代替给定参考电压。引入变量X,Y,Z来计算。
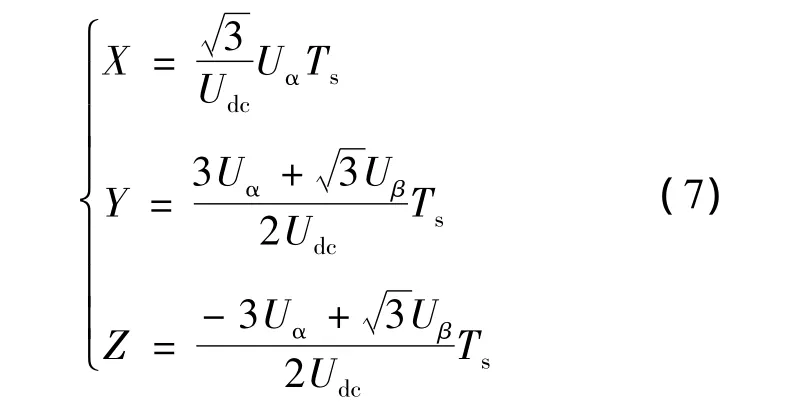
式中:Uα和Uβ是参考矢量Ur在 αβ坐标系下的两相电压。根据前面定义的扇区号和式(3),可得到空间矢量所处扇区与两个边界矢量U1和U2作用时间T1和T2的关系,见表1。只要算出X,Y,Z和扇区号,查找对照表就可得知T1和T2。
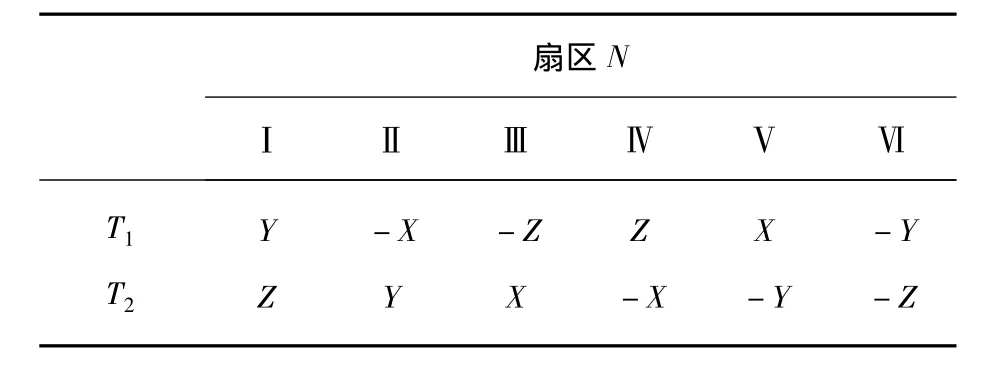
表1 不同扇区下的T1与T2对照表
2.2 参考电压所在扇区计算
逆变器输出的六个有效矢量把空间分成了六个扇区,由表1可知要合成参考电压,必须知道参考电压矢量所在的扇区号。
设中间变量 A,B,C:
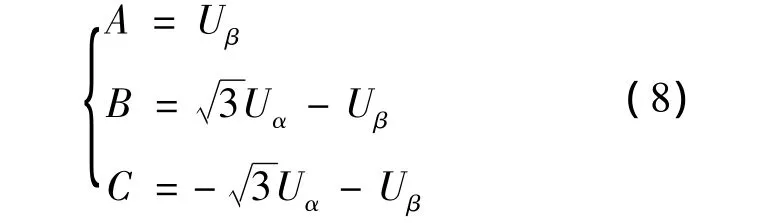
则扇区N计算公式为

式(9)中:sign(x)是符号函数,如果x>0,则sign(x)=1,反之则为0。
2.3 空间电压矢量的合成
2.3.1 开关切换顺序
在有效矢量作用的同时,加入零矢量,这样不仅可以稳定参考电压的幅值,也可以减少开关状态的变化次数,不同的零矢量添加方法会得到不同的效果,目前比较流行的合成方法有五段式和七段式。七段式空间电压矢量合成谐波含量低,但是算法复杂;五段式空间电压矢量合成效果较好,开关损耗小,算法简单。综合考虑,本文采取五段式空间电压矢量合成方法合成空间电压矢量。
五段式空间电压矢量合成是将零矢量放在参考电压合成的开始和结束。不同的开关顺序产生的逆变器开关信号也不同,表2所示的开关方案,每一次开关矢量变化只有一位发生转变,因此开关次数比用软件确定的开关模式的常规方法少了1/2,减小了开关损耗。
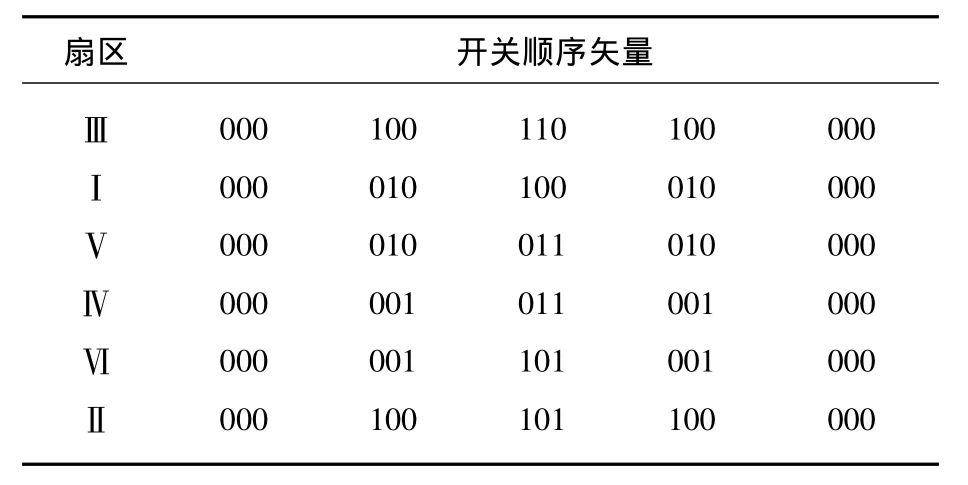
表2 开关顺序表
以第Ⅲ扇区为例,开关的动作顺序是:U0(000)—U1(100),U0持续时间是 T0/2;U1(100)—U2(110),U1持 续 时 间 是 T1/2,U2(110)—U1(100),U2持 续时间 是 T2;U1(100)—U0(000),U1持续时间是 T1/2;最后是U0(000)的状态保持时间T0/2,如图3所示。
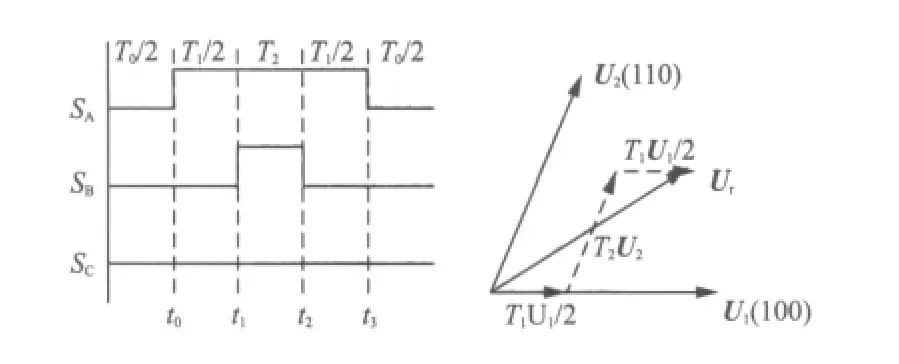
图3 五段式空间电压矢量合成
2.3.2 死区控制
电力电子开关器件都存在着导通和关断时延,且导通时延一般低于关断时延,这就会导致逆变器开关状态转变时产生直通短路。为了避免这种情况的发生,可以加入死区控制。在信号转变时,先将处于导通状态的器件关闭一段时间,直到其可靠关断后再将另一个管子导通,这段时间一般不低于4 μs(见图4)。
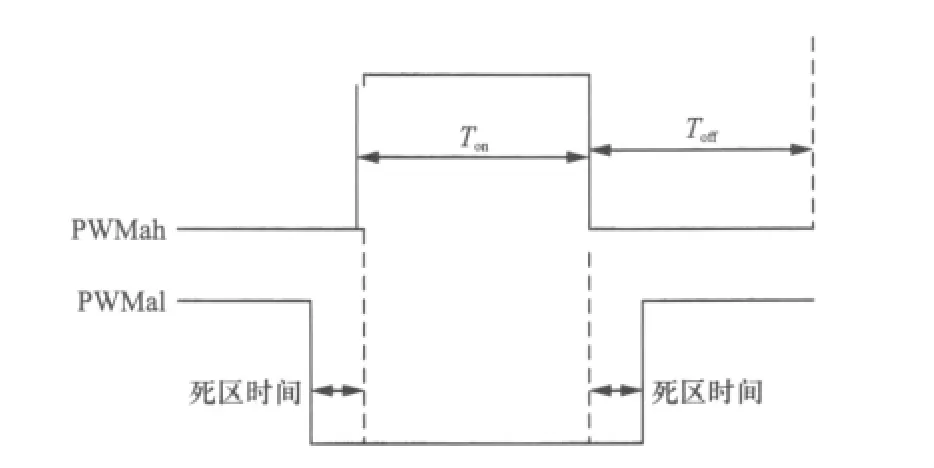
图4 加入死区的PWMb通道的PWM信号
2.3.3 PWM 信号的产生
PWM信号的产生完全取决于各有效矢量的作用时间。有效矢量的保持时间在这里用时钟个数表示。以第Ⅲ扇区为例,从图3可知,在一个采样周期内,只有SA、SB两个开关信号发生变化,以SA为例,说明开关信号的产生(见图5)。
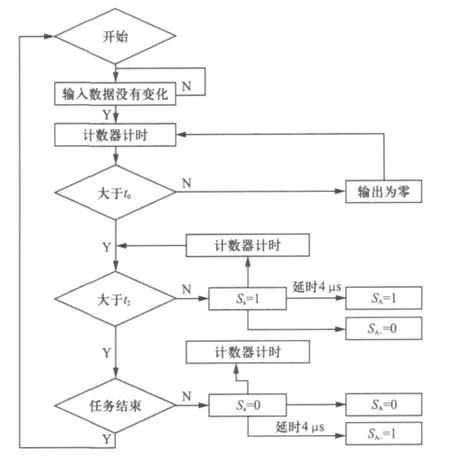
图5 SVPWM开关信号流程图
一个工作周期内,SA开关信号发生两次变化,将整个进程分为三个部分。设置3个比较器,输入时间节点t0、t1和采样时间Ts存储在比较器中,与计数器进行比较,控制信号转变。
2.3.4 多轴控制PWM信号输出
本方案利用FPGA的高信息处理能力,对2组不同传输速率下的输入信号进行处理,得到2组6对12路的PWM信号,见图6。两个模块相互独立,互不干扰,时钟信号clk_1和clk_2的不同,将会让模块1和模块2以不同的速率工作。随着输入信号的增加,可以产生更多通道的PWM信号。
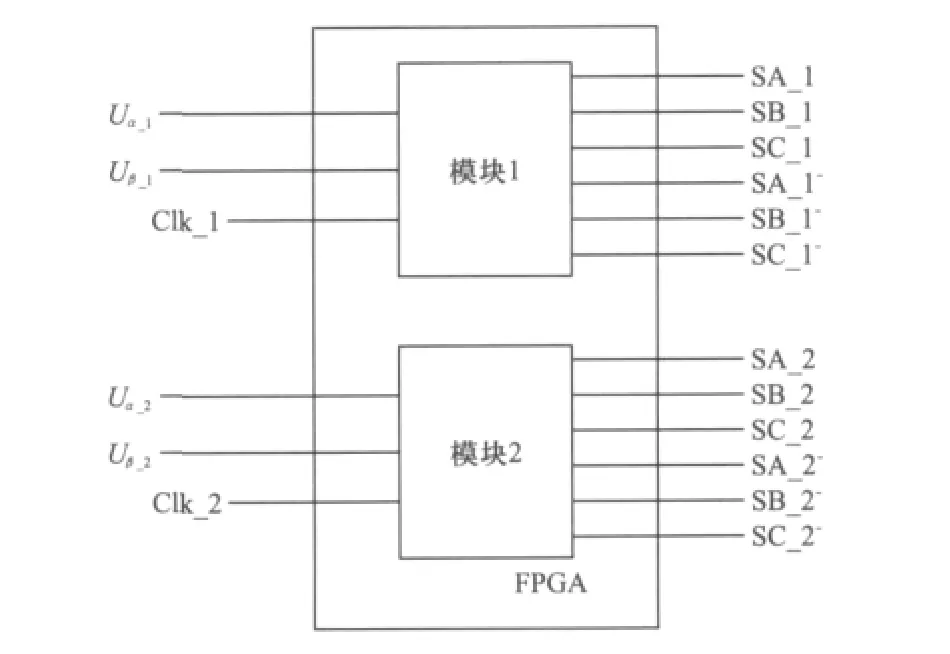
图6 多轴SVPWM信号输出方案框图
3 试验结果
试验中,在libero环境下编写程序,芯片选择PA系列的APA600—208PQFPG。图6中模块1时钟设置为1 MHz,采样周期为100 μs,模块2时钟设置为50 kHz,采样周期为0.4 ms,参考空间电压幅值为70 V,逆变器电压源电压为150 V。程序在ACTEL公司的APA600芯片上运行的结果如图7~图9所示。
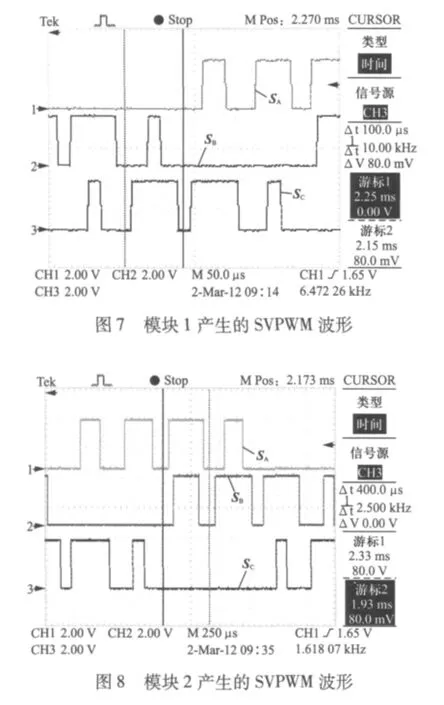
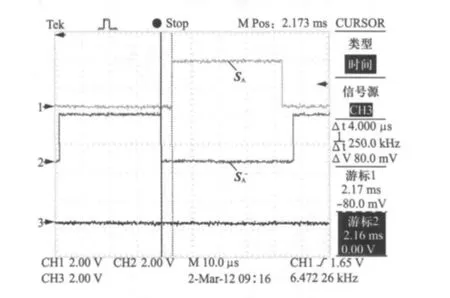
图9 模块1加入死区控制的波形
图7和图8中显示为五段式空间电压矢量合成图,分别为SA、SB、SC的开关信号,显示采样周期为100 μs和 400 μs;图 9 中为 SA和 SA-信号,显示死区延时为4 μs。
4 结语
试验图形表明,应用对现有算法改进了的设计方案,实现了五段式空间电压矢量合成和死区控制,完成了不同速率下的多轴SVPWM信号输出,为以后应用于多轴电机控制系统打下了基础。在后续的开发中,考虑使用内嵌除法器的FPGA,提高计算精度,使输出的准确性得到进一步提升。
[1]王晶晶,王麾.基于DSP的两种SVPWM技术实现方案研究[J].电工技术,2003(1):39-42.
[2]雄健,张凯.空间矢量脉宽调制的调制波分析[J].电气自动化,2002(3):7-12.
[3]池志田,王宝良,黄志尧.基于 DSP和 FPGA的SVPWM 的实现研究[J].电气应用,2005,24(6):71-75.
[4]黄少瑞,郝润科,朱军,等.基于DSP的异步电机SVPWM 控制技术实现[J].电气自动化,2010,32(5):19-22.
猜你喜欢
南北桥(2022年2期)2022-05-31
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
哈尔滨铁道科技(2020年4期)2020-07-22
电脑知识与技术·经验技巧(2017年9期)2018-02-24
西南交通大学学报(2016年4期)2016-06-15
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
计算机技术与发展(2016年10期)2016-02-27
电测与仪表(2015年12期)2015-04-09