
基于物联网的智能大棚灌溉系统的设计
2012-06-01 06:58淮安生物工程高等职业学校张兆朋
电子世界 2012年21期
淮安生物工程高等职业学校 张兆朋
基于物联网的智能大棚灌溉系统的设计
淮安生物工程高等职业学校 张兆朋
本文对智能大棚的灌溉系统进行了研究,提出了基于物联网的智能大棚灌溉系统的自动控制,利用各种传感器采集信息传送到C8051F340从机,从机通过Can控制器和Can收发器,传到总线,总线再通过Can控制器和Can收发器传到到主机,将数据信息通过以太网输送到上位机,采集的信息与数据库里的参数进行比较,实现上位机控制下位机,根据温度,湿度等配置控制配置营养液进行自动灌溉。
C8051F340;can;物联网;cp2200
物联网就是“物物相连的互联网”,通过射频识别(RFID)、红外感应器、全球定位系统、激光扫描器等信息传感设备,按约定的协议,把任何物体与互联网相连接,进行信息交换和通信,以实现对物体的智能化识别、定位、跟踪、监控和管理的一种网络。我国是农业大国,人口众多,对粮食蔬菜等农作物需求巨大,随着农村大量劳动力流向城市,农村劳动力长远看会出现短缺,而我国农业灌溉中大多还是采用传统的灌溉方式,不仅耗人力而且水资源也是浪费,传统的灌溉还有不及时,效率低,灌溉量不精确等问题。本文提出了智能大棚灌溉系统的设计,研究了通过传感器检测来判定是否灌溉,灌溉是否完成,充分考虑关照,温湿度等对需求量的影响,并考虑到不同季节不同作物需水量的不同,通过水位监测判定是否灌溉完成,通过vc界面选择不同季节,不同作物,通过传感器检测到的环境参数与上位机数据库中的标准参数比较,判定是否要进行灌溉,灌溉量是多少,由上位机传达命令到下位机控制执行机构工作,进行浇水灌溉,达到最佳的灌溉效果。
1.总体设计
1.1 总体框图
如图1所示,由C8051F340构成网络节点,传感器采集的信息输入到这些从机,从机通过can总线传递给主机C8051F340,主控机汇总消息,传输到网络然后传到上位机电脑,采集的数据信息与上位机中数据库内的标准参数比较,分析,优化,最后上位机发出控制命令控制下位机工作。
1.2 下位机框图
下位机(如图2)由C8051F340单片机和采集装置、执行机构组成。其中C8051F340单片机是核心,起控制作用;采集装置由一些传感器构成。灌溉时要考虑光照,空气温湿度故检测装置有光照传感器和温湿度传感器,灌溉是否完成需要水位监测;执行机构有通风装置,灌溉装置和加温装置,在灌溉时需要通风,而冬天东风温室大棚内温度会低,故要进行加热升温,当需要灌溉时,单片机从机接收指令,控制执行机构动作,实现灌溉。
2.硬件设计
C8051F340是美国Silabs公司生产的与标准8051兼容的高速单片机,它具有速度高,功耗低,有丰富的外围设备,片内还集成了数据采集和控制所常用的模拟部件、其他数字外设和功能部件,是完全集成的混合信号系统及芯片。
2.1 传感器与单片机的连接
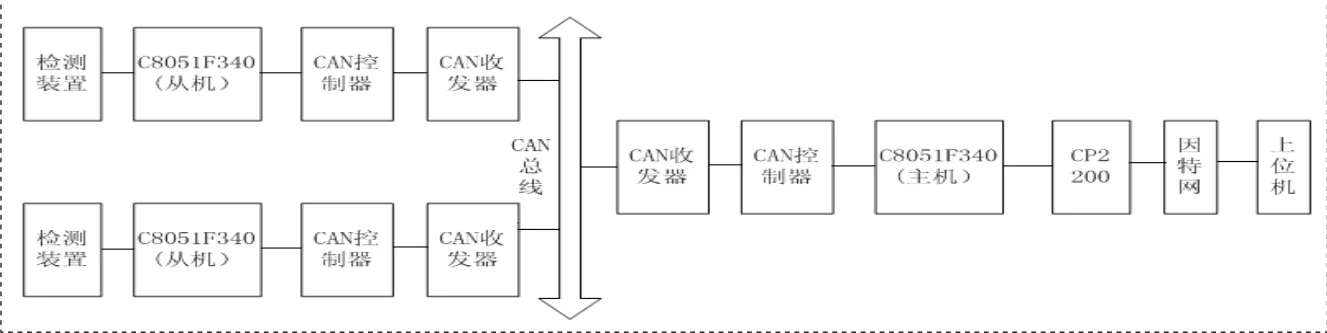
图1 总体框图
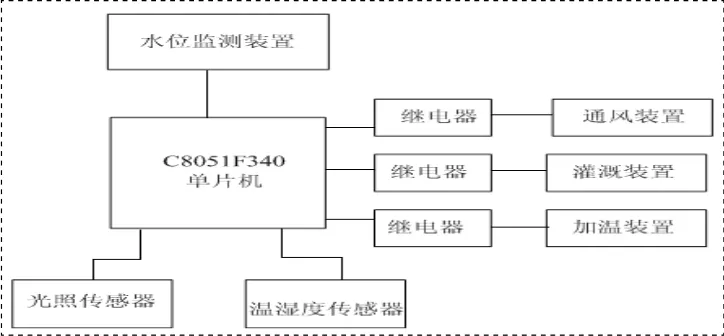
图2 下位机框图
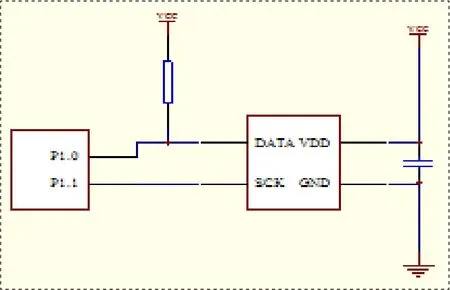
图3 单片机与SHT11连接图
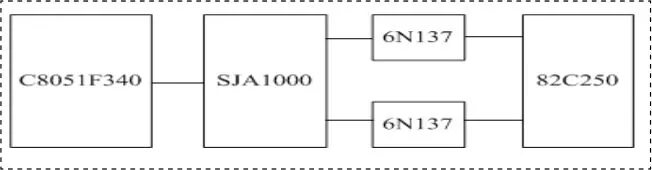
图4 CAN通信
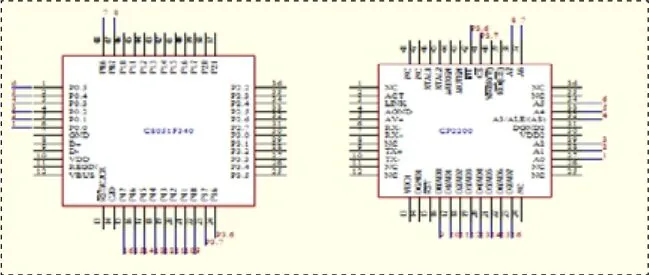
图5 CP2200与C8051F340的链接
如图3,温湿度传感器选用SHT11,这是瑞士Sensirion公司生产的具有二线串行接口的单片全校准数字式新型相对湿度和温度传感器,可用来测量相对湿度、温度等,分辨率高。光传感器选用TSC2561,它是TAOS公司推出的一种高速、低功耗、宽量程、可编程的光强度数字转换芯片,可直接通过I2C总线协议,由MCU访问。
SHT11的供电电压范围为2.4-5.5V,建议供电电压为3.3V。在电源引脚(VDD,GND)之间须加一个100nF的电容,用以去耦滤波。
2.2 Can总线
CAN属于现场总线,能有效的支持分布式实时控制,主机向从机1发布命令时,其他从机可接受命令,但不需要作出反应,只有从机1接受命令并作出反应,在CAN总线通信中,控制器采用PHILIPS公司的SJA1000和收发器选用82C250芯片。为了增强抗干扰能力,选用了高速光电耦合器6N137。单片机对SJA1000进行初始化,通过控制SJA1000实现数据的接收和发送等通信任务。采用双绞线进行连接。SJA1000的AD0-AD7连接到单片机的8个I/O接口,对应的引脚相连,单片机可对SJA1000执行读写操作,可通过中断方式访问SJA1000,如图4。
2.3 以太网控制器与单片机连接
如图5,CP2200是集成了IEEE 802.3以太网媒体访问控制器(MAC)、10Base-T物理层(PHY)和8KB非易失性FLASH存储器的单芯片以太网控制器;可以为具有11个以上端口I/O引脚的任何微控制器或主处理器增加以太网通信功能;8位并行总线接口支持Intel和Motorola总线方式,可以使用复用或非复用方式寻址;是目前体积最小的单芯片以太网控制器。
将地址总线端口A0~A7接F340的管脚P2.0~P2.7,数据总线端口D0~D7接P4.0~P4.7,F340通过这两条总线对CP2200进行寻址和数据收发。INT和CS和分别接F340的管脚P3.6和P3.7;单片机通过管脚P3.6控制CP2200,CP2200通过P3.7向单片机发出中断申请。
2.4 执行机构
电动机作为执行机构,负责通风,灌溉,加热,执行机构均由继电器间接控制。所用电机为步进电机,方便控制器控制速度,电磁阀采用220V交流的,型号:2W-160-15,型式:常闭式(即:通电打开,断电关闭;)。
2.5 注意事项
(1)电磁阀远离控制器,需通过继电器间接控制,另外要加入电阻电容缓冲,防止影响控制其正常工作。
(2)电源采用开关电源,接通220交流电,输出12V6A直流电,电流电压都要注意,电流过小会造成开关冒火花但电动机不工作。
(3)C8051F340与继电器之间加反相器,控制电动机,防止启动时烧坏电源。
3.系统软件设计
3.1 上位机设计
界面采用vc编程,参数放置采用数据库,不同季节灌溉量不同,不同季节具体灌溉量在数据库中设置好,比如夏季要增加灌溉量,冬季要减少灌溉量,在界面中可用鼠标点击按钮选择季节。同样不同的作物也是。光照不同,空气温湿度不同,灌溉量也不同,具体的标准参数设置在数据库中,检测到的信息与标准参数进行比较。
主机通过无线传输接受从机发来的信息,然后通过无线传输装置发送到上位机PC,上位机专家系统中有不同作物(西红柿、茄子、辣椒、西瓜等)的标准参数(不同的作物在不同的季节所需要的光照,温度,水分不同,白天晚上温差大时所需要的光照也不同),标准参数与采集的信息比较后发出命令,主机接收上位机的指令,传给从机节点。
上位机控制下位机关键是协议,协议要一致,比如在上位机中设置ComPort.Settings="4800,n,8,1"那么下位机程序中要对应,可以这样写程序:

TH1=0xF3;//定时器初值高8位设置//12MHZ晶振,波特率为4800

3.2 CAN通信软件设计
(1)SJA1000的初始化子程序:初始化包括工作方式的设置、接受滤波方式的设置、接收屏蔽寄存器和接收代码寄存器的设置、波特率参数设置等。
(2)发送子程序:发送时将等待发送的数据按特定格式组合帧报文,送入SJA1000发送缓存区,启动SJA1000发送即可。
(3)接收子程序:处理接收报文的过程中,同时要对诸如总线关闭、错误报警、接收溢出等情况进行处理。
4.结束语
本文提出了基于物联网的专家系统,利用C8051F340单片机与can总线以及以太网控制器进行设计,利用传感器检测环境参数,通过与标准参数比较做出判断,温湿度不同,光照不同时,电脑自动设置不同的灌溉量,有利于精确灌溉,节约用水,有利于植物的生长,节约了人力资源。
[1]戴春霞,赵德安.基于ARM9内核的智能灌溉控制系统的设计[J].安徽农业科学,2010,38(15):8208-8210.
[2]张丽红,孙磊,伦翠芬,王庆祝.基于CAN总线的连栋温室节水灌溉控制系统[J].农机化研究,2011,6(6):168-170.
[3]冯显英,葛荣雨.基于数字温湿度传感器SHT11的温湿度测控系统[J].自动化仪表仪表,2006,27(1):59-61.
[4]陈姣姣.基于C8051 F340嵌入式以太网控制器的设计[J].科技资讯,2011,25:21.
[5]祝晓东.基于CAN总线的温室控制系统智能节点的设计[J].农机化研究,2007,5(5):118-120.
[6]程月华,毛罕平,李萍萍.设施农业灌溉量控制模型和营养液供给自动控制系统[J].计算机工程,2003,7(11):137-139.
[7]任文涛,杨懿,张本华,崔红光,黄毅,张玉龙.温室节点式渗灌自动控制系统设计与实现[J].农业工程学报,2009,8(8).
[8]潘明,钟锋.物联网在现代农业上的应用研究[J].现代农业装,2011,7:55-57.
张兆朋(1980—),男,淮安生物工程高等职业学校讲师,研究方向:智能控制研究。
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
装备制造技术(2020年1期)2020-12-25
科技与创新(2018年1期)2018-12-23
电子制作(2017年24期)2017-02-02
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
电源技术(2015年7期)2015-08-22
中国交通信息化(2015年11期)2015-06-06
空间控制技术与应用(2015年2期)2015-06-05
