
直流电机驱动及低转速控制的实现
2012-05-18 08:49桂林电子科技大学信息科技学院于新业马姝靓
电子世界 2012年22期
桂林电子科技大学信息科技学院 于新业 易 艺 马姝靓
1.引言
电机是控制系统中常用的执行机构,小型直流电机由于其价格低廉而得到广泛的应用。而目前市场上所售的直流电机除减速电机外,一般转速都比较高,当供电电压达到某值(“阈值”)时才能被启动,而且电机一旦启动,转速就非常快。虽然直流电机具有较好的调节特性(电机转速与供电电压成正比),但前提条件是电机已经正常启动。在实际的控制系统中往往需要较宽的调速范围,如智能小车的控制,除了要对其较高速度段的速度进行控制外,低速段的控制也极为重要。因此,本文针对直流电机低转速控制难和控制范围窄的问题,在分析几种直流电机硬件驱动方法的基础上,提出了直流电机低转速控制的方法,并进行实验。
2.直流电机驱动电路
直流电机硬件驱动电路种类很多,其中最常见的有经济型驱动、T形桥驱动和H桥驱动共三种。
2.1 经济型驱动
该驱动方法只使用一只开关管(达林顿三极管或MOS管)完成驱动,通过控制开关管的通断来接通或关断电机,其驱动电路如图1所示。其优点是使用的开关元件少、线路简单、成本低、可以实现简单的调速,电机的一端接地,便于引出反馈信号。缺点是只能控制电机单方向旋转。
2.2 T形桥驱动
T形桥驱动方式采用两只开关管完成驱动,通过控制开关管的通断可以实现电机的可逆供电以实现正转和反转控制,其驱动电路如图2所示。当SW1导通时,电机M承受正向电压(正转);当SW2导通时,电机M承受反向电压(反转)。其优点是使用的开关元件较少、成本较低、线路简单、可实现电机的正转和反转控制,电机的一端接地,便于引出反馈信号。缺点是需要正、负两个极性的电源供电,三极管或MOS管要承受两倍电源电压。
2.3 H桥驱动
H桥驱动方式采用四只开关管实现电机的正转和反转控制,其驱动电路如图3所示。其优点是只需要单极性电源就可实现电机的正转和反转控制,而且元件的耐压值要求低。缺点是所用的开关元件较多,电路较复杂,电枢两端浮地。在H桥驱动电路中,四只开关管的通、断状态组合可以实现电机的四种运行模式,其工作状态真值表如表1所列。
3.直流电机转速控制原理
直流电机调速常采用PWM(脉冲宽度调制)方法,对于经济型直流电机驱动一般采用单极性PWM控制。其方法是通过改变电机电枢接通时间与通电时间的比值(占空比)来控制电机的速度。基本原理如图4所示。
加载到电机电枢上的脉冲信号周期为T,当通电时,电机速度增加;断电时,电机速度逐渐降低。只要按照一定的规律,改变开关管的通电和断电时间,即可让电机转速得到控制。设通电时间为T,此时电机达到最大转速Vmax,占空比为D=t1/T,则电机的平均转速应为Vd=Vmax·D。
对于T形桥驱动方式的直流电机调速一般采用双极性PWM控制,如图5所示。电机不断的正向和反向通电,此时电机只有在脉冲信号占空比为50%时,通电和断电的时间相同从而使电机正向和反向作用相互抵消,电机才能停转,占空比大于50%时电机将正转,占空比小于50%时电机将反转。
采用H桥驱动方式进行调速时,一组对角的桥臂工作(正转),另一组对角的桥臂应该可靠关断,此时工作的桥臂也可采用PWM控制,此时的PWM选用单极性方式;同理,当电机反转时,对应的工作桥臂的工作状态相互对调即可。

表1 直流电机H桥工作状态真值表
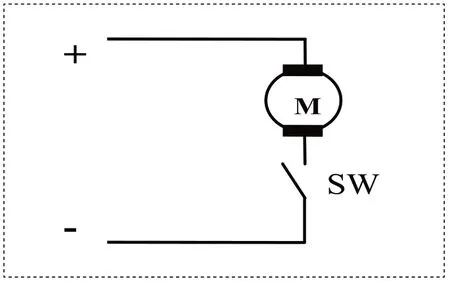
图1 经济型驱动电路图
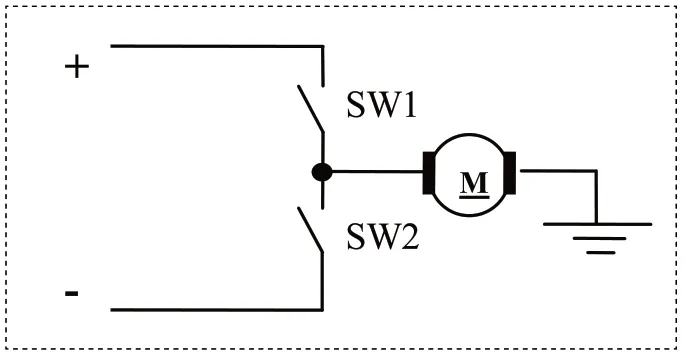
图2 T形桥驱动电路图
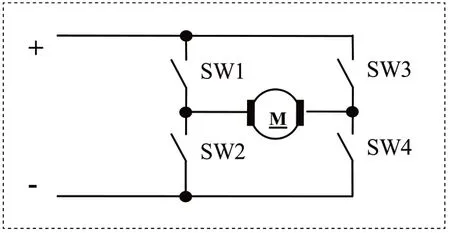
图3 H桥驱动电路图
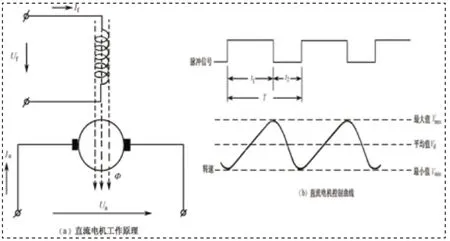
图4 脉冲宽度调速系统原理图
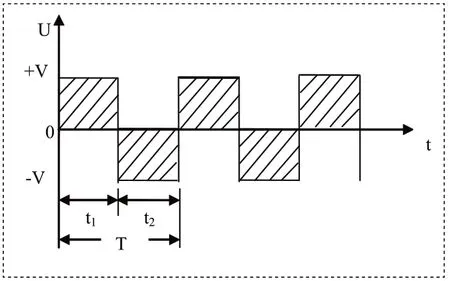
图5 双极性PWM控制原理图
4.直流电机低转速控制方法
由于目前市场所售的小型直流电机大部分都是高速电机(除减速电机——带有减速齿轮的电机),即当电机的供电电压低于某值(“阈值”)时电机不转(死区),而当供电电压高于该值时电机的转速已经很快,所以要实现低转速运行靠改变电机供电电压的方法是很难实现的。而经济型驱动电路采用单极性PWM控制方法进行低速控制时,需要减少通电时间,等待电机转速下降到“死区”后才能实现,因此,采用这种方法控制的电机在低速运行时会明显的看到电机转速忽高忽低的波动状态。
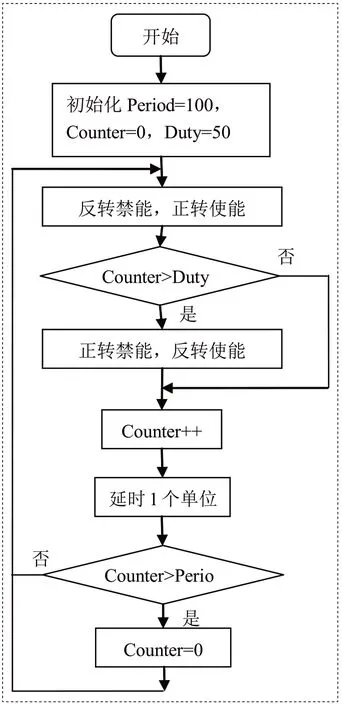
图6 直流电机低转速控制PWM产生流程图
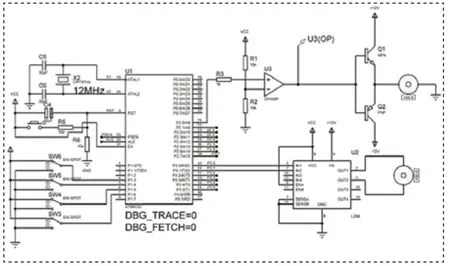
图7 直流电机低转速控制仿真图
采用T形桥驱动电路可以使用双极性PWM控制方法进行低速控制,只要选择合适的脉冲周期T,t1时间段电机正转,t2时间段电机反转,当占空比略大于50%时,正转程度比反转程度大,所以电机在一个脉冲周期内朝正方向正转一很小的角度,当按以上规律连续通电时便可实现慢速运行。
由于采用T形桥驱动电路需要双极性供电,电路复杂程度较高,因此H桥驱动方式在电机正反转控制和低速控制中显示出了优势。采用H桥驱动电路虽然在正转或反转任意一个状态仍为单极性PWM,但方向切换比较容易,所以按照T形桥驱动电路的思想,电机在任何时刻不是工作在正转状态,就是工作在反转状态。采用在一个脉冲周期内正转和反转时间相等则停转,正转时间大于反转时间则正转,反转时间大于正转时间则反转的控制方法进行控制,便可实现电机的低转速控制。
5.直流电机低转速控制仿真实现
无论采用T形桥还是H桥进行直流电机的转速控制,只要能够实现正转和反转的对应抵消效果,便可实现低转速运行的控制,其程序流程图如图6所示。
流程图中Period为PWM信号的周期,为表示方便将其设为100,Counter为当前值计数器,Duty为占空比,初始设为50,此时电机正转和反转时间相等,作用刚好抵消,处于停转状态。改变占空比便可改变电机正反向转动及其速度。
对于H桥驱动电路,其正反转控制可以使用正脉冲逻辑驱动各桥臂的开关管,方便实现转换。而对于T形桥驱动电路,由于负电源的存在,需要将单片机的输出进行转换,即0对应输出负电压,1对应输出正电压(或反之)才能对T形桥进行驱动,因此需要设计一个转换电路。其仿真电路如图7所示。
6.结论
直流电机在控制系统中的地位十分重要,其调速和定位是直流电机控制研究的主要内容。本文对直流电机低转速控制方法进行仿真和实验,实验结果表明:该方法简单可行,且拓展了直流电机的调速范围,在需要的场合加入闭环控制可以方便的进行精确定位、控速,实现伺服控制,达到更好的控制效果。
[1]栾志军,樊春利.基于C语言的直流电机调速系统[J].煤炭技术,2011,12:35-36.
[2]王瑾.基于单片机的直流电动机控制系统研究[J].中国科技信息,2011,02:144-145.
[3]王立红.基于单片机的直流电机控制系统设计[J].知识经济,2011,08:102-103.
[4]茹占军,谢家兴.基于AT89S52单片机直流电机调速系统的设计[J].软件导刊,2010,08:106-107.
[5]潘新民,王燕芳.微型计算机控制技术(第二版)[M].电子工业出版社,2011:140-150.
猜你喜欢
大电机技术(2022年5期)2022-11-17
数学物理学报(2022年3期)2022-05-25
数学物理学报(2019年5期)2019-11-29
时代英语·高一(2019年5期)2019-09-03
中成药(2017年12期)2018-01-19
电子制作(2017年1期)2017-05-17
电测与仪表(2016年11期)2016-04-11
电源技术(2015年5期)2015-08-22
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
