桥补结合电路技术在力传感器中的应用及分析
2012-05-15 08:07李育德米哲敏
太原理工大学学报 2012年1期
李育德,米哲敏
(1.太原理工大学 材料科学与工程学院,太原030024;2.同济大学 电子与信息工程学院,上海201804)
在做力及重量测量时,习惯的做法是将受力传感器的输出信号(传感器信号)直接传送给测量系统的前级放大部分,传感器与测量系统之间仅仅保持有简单的信号传递关系,且传感器只有力、电转换作用。尽管当代仪表技术已经进入智能化时代,并且达到尽善尽美的水平,但要实现高精度测量的同时对传感器也提出较为苛刻的要求;而要想使传感器获得设计水平,仪表必须提供出高质量、高稳定的使用参数与条件。之所以互相要求条件之高,其根本原因是由于传感器与仪表二者之间不存在模拟量平衡关系。
1 桥补结合电路及构成
由电阻应变片所组成的直流惠斯顿电桥(以下简称电桥)就是要产生因力作用于受力模型弹性体变形而相应使桥路输出信号,这样就直接把测力的过程简单地转变为测电的过程了。被测对象的转变必然带来测量方法与方式的不同,其误差表达形式及计算过程等诸多因素均会对测得结果产生影响,这是因为直接测量转变成间接测量而造成的。桥路问题是个古老的话题,为完善这一技术手段,多年来推出了非常多的解决问题的方法、思路;得出了相应的应用条件、公式及定理,并获得很好的效果。在当今仪器、仪表高度发达的同时有必要对桥路作更深一步的研究,以便充分地倍加掌握这一经典技术。

图1 桥补结合电路
以四个传感器组成一台测力装置系统为例说明。作桥补结合电路(以下简称桥补电路),如图1所示。图中:R1-1,…;R2-2,…;R3-3,…;R4-4,…代表各传感器同一位置(名)上的应变计,RS为补偿电压的采样电阻、RSδ为补偿电阻。从图中可以看出,桥补电路是由电桥与补偿回路两部分构成,并通过采样电阻RS把这两部分结合在一起的。当力W作用于传感器后引起电桥输出,使得后续测量电路得到一个输入电压信号UAB而引起数字补偿系统工作,补偿电阻RSδ是以数字形式对电桥输出信号进行自动补偿的(该补偿是较为复杂的单元技术,为文字叙述方便,采用电位计的直观图形来代表该单元的转换作用),直至达到电位VB=VA时补偿自动停止,显示部分同步显示出测量数值。
2 桥补电路性能分析
从图1可以看出,构成桥补电路的前提条件就是将各传感器的四个应变计按“同一位置”的原则串接(或并接)来组成一个桥臂,然后再把组成的四个桥臂搭成一个电桥。这样我们可以得出图1的简化图,如图2所示的桥补电路。在这个桥补电路图中,∑Ri|i=1,2,3,4表示同一位置的应变计阻值之和;∑ΔRi|=1,2,3,4表示同一位置的应变计阻值变量之和,用ΔRS取代补偿回路RS∥RSδ,∑RL,∑RR分别表示左、右半桥应变计阻值之和;∑ΔRL,∑ΔRR分别表示左、右半桥应变计阻值变量之和。

图2 桥补电路
尽管力学模型元件可以做出许多样式,但目前还是以通过测弯、剪、轴向以及它们的组合为主要的途径来完成弹性元件的设计,并且本着使电桥输出最大为目标来合理粘贴应变计的。讨论电桥输出电压与桥路阻抗内在关系非常有必要,对了解桥补电路的实质内容很有帮助。
2.1 电桥四臂应变相等时的输出
电桥四臂应变相等时,此时电桥习惯地称为等臂全桥,常用的双孔弯曲梁传感器(S型传感器)便是应用的实例。设有一组已按图2所示接好的传感器,同时做出该电路的等效电路,见图3所示。从a,b点看,把该电路可以分成应变电路与补偿电路两部分,当电路工作时,从平衡角度理解可以产生如下等式。
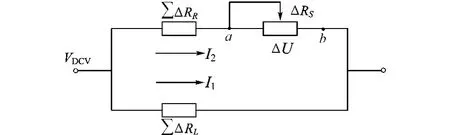
图3 桥补等效电路
应变电压:

只有当ΔUab=ΔU时可得出平衡方程,应变电压平衡方程:

由于电桥存在着原始不平衡,使得电流表现出如下关系:

又因是等臂全桥,则有下述条件成立:

做一些代换可得以下方程。
应变电阻平衡方程:

在传感器仅重力作用时∑RR,∑RL值是不变的(应变电阻代数和为零),所以可得表达式:

式中:常数因子

通过上述平衡方程式(1),(2)及[结论1]表达式演变可以看出,当有常数因子K存在时所做的测力或称重的测量过程,在桥补电路里可表现为可以用ΔRS电阻的形式来补偿∑ΔR的应变电阻量使得电桥恢复平衡的过程。在这种情况下,就可以把电桥的补偿不再看成是电压补偿而变为电阻补偿,通过电阻补偿使电桥恢复平衡。通俗地讲就是,因电桥阻值发生了∑ΔR量的变化使VA离开原平衡点,通过调节△RS而产生∑ΔRS的效应使VB重新与VA平衡。这样,补偿回路自然便成为电桥的一部分,这就是桥补电路不同于电桥之处,也是桥补结合电路的基本特点。
2.2 左、右半桥应变不相等时电桥的输出
这种情况,常用的柱环式传感器便是例子。这时,下述条件成立:
这类电桥称为第一对称全桥[3]。
此类型桥路的应变电阻平衡方程:

因为当有重力存在时∑RR,∑RL值不变,所以有恒等式:
但是,∑ΔRL,∑ΔRR的改变是呈线性状态变化的,因而可以令:

式中:常数因子K=C+P.
比较两个结论表达式完全相同。此时同样可得出上述理论结果,它仍然是电阻的平衡过程。
3 同半桥中两臂应变不相等时电桥的输出
圆柱型、圆筒型传感器就是属于此类情况的典型例子。这类传感器的应变计粘贴有竖向及横向之别而组合成非对称电桥。应用材料力学知识可知,在同一力的作用下竖向的应变量值将大于横向值,也就是泊桑效应。对于制做传感器的钢质材料来说其相应的泊桑系数μ=0.24~0.30范围,在这一前提下,完全可以做到以下条件成立:
第一,桥臂应变值 ∑ΔR1,∑ΔR2,∑ΔR3,∑ΔR4都是线性变化的。
第二,同时保证实现相关关系成立,即

但是,正因为泊桑现象的存在,使得在传感器受力后产生了臂阻抗变化不平衡现象。图4是以D点为参考点比较受力前后A,B两点阻抗变化矢量图,从图中看到,受力前A,B两点同时处于某一定义平衡状态,但在受力后则分别从原来的A,B点移至A′,B′两点,产生了一些不平衡现象:

且存在着∑ΔR4=μ|∑ΔR3|的关系,这样最终导致|B-B′|>|A-A′|的结果。

图4 臂阻抗矢量变化
在上述2.1与2.2小节中谈到仅当重力存在时∑RR,∑RL值不变,存在着一个比值常数。但在该例子中∑ΔRL,∑ΔRR值因受到∑ΔR4=μ∑ΔR1,∑ΔR2=μ∑ΔR3关系的影响而不在保持恒定,这样是否导致∑RR/∑RL比值也会受到同样的影响而不表现不变性。
设,在传感器受力前比值为:
在传感器受力后左、右半桥阻抗为:
其比值为:
这样可以认为 ∑RR/∑RL比值受重力的影响可忽略不计。
该类型桥路的应变电阻平衡方程:

因对某一个传感器来说μ值是恒定的,这样可得表达式:

式中:常数因子同样可得出上述的理论结果,称重和测力过程仍然是电阻的线性补偿和桥路电阻的线性平衡过程。
4 结论
电阻应变式测试技术中等臂全桥、对称全桥以及非对称全桥是常用的电桥电路,针对这三种电路使用的广泛性及覆盖性的特点,分别逐一地论证实现桥补结合电路的可能性(上述三个结论的导出充分表明了可能性)。这样就可以实现在电阻应变式测试系统中,仅对电源提出能保证测量的灵敏度就行了的唯一要求。这也是桥补结合电路的特点之一。
桥补结合电路技术的的成功实现后,完全可以克服传统的惠斯顿电桥所表现出难以弥补的一些不足之处,并对测试技术带来了某些改进。
[1] 秦曾煌.电工学[M].北京:高等教育出版社,1999.
[2] 康华光.电子技术基础[M].北京:人民教育出版社,1982.
[3] 王化祥,张淑英.传感器原理及应用[M].天津:天津大学出版社,1990.
[4] 袁希光.传感器技术手册[M].北京:国防工业出版社,1986.
[5] 机械工业部仪器仪表工业局.非电量电测变换技术[M].北京:机械工业出版社,1988.
猜你喜欢
电子元件与材料(2022年11期)2023-01-10
山西电子技术(2022年2期)2022-04-22
轻金属(2021年7期)2021-08-25
山东电力技术(2021年1期)2021-02-03
通信电源技术(2019年2期)2019-03-23
海外文摘·艺术(2019年21期)2019-02-12
中学生数理化·教与学(2018年10期)2018-12-06
通信电源技术(2018年3期)2018-06-26
通信电源技术(2016年5期)2016-03-22
铁道科学与工程学报(2015年4期)2015-12-24