滤波筒式圆波导旋转关节的设计
2012-04-14 03:04:42张佳龙
火控雷达技术 2012年4期
张佳龙
(中国电子科技集团公司第38 研究所 合肥 230031)
1 引言
旋转关节是雷达馈电传输线中的关键元器件之一,在各类机械扫描的雷达系统中,旋转关节的作用是保持天线在连续旋转过程中馈电传输线中的雷达发射或接收信号连续不断。
从场结构上看,旋转关节一般可以分为两个部分:旋转部分和模式变换部分。旋转部分的物理结构和场分布必须具有轴对称分布的特征,这样才能保证在连续旋转过程中获得稳定的输出,例如同轴线中的TEM 模、圆波导中的TM01模等;模式变换部分则是将旋转部分的传输线电磁场模式转换为输入输出接口的传输线电磁场模式。为了实现旋转,将旋转部分的传输线在物理上断开,分别命名为转子和定子,同时在断开位置合理的设计四分之一波长的扼流槽来实现射频信号的连续传输。
本文讨论的旋转关节,其输入输出接口是矩形波导,转动部分的传输线是圆波导,圆波导直径大于矩形波导的宽边尺寸,矩形波导与圆波导相互垂直,构成了矩-圆波导垂直过渡,在垂直过渡的圆波导两端各有一段圆波导滤波筒,此类旋转关节我们称之为滤波筒式圆波导旋转关节,其外形结构形式如图1所示。
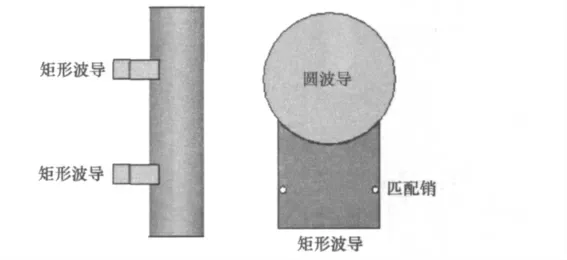
图1 滤波筒式圆波导旋转关节的外形结构示意图
这种滤波筒式圆波导旋转关节的主要优点是低损耗、旋转相位稳定和耐高功率,特别是在平均功率很大的情况下,此类旋转关节因为损耗而产生的热量,可以很容易的传导到金属外壳,并可通过风冷将热量带走,从而保证旋转关节内部不会因为温度的升高而造成功率容量下降。但是,此类旋转关节的工作带宽比较窄,一般不超过5%,使得其应用受到很大限制。
2 理论分析与设计
滤波筒式圆波导旋转关节的输入输出接口是矩形波导,其工作模式是TE10模;而通过如图1 中所示的矩圆波导垂直过渡的模式变换之后,电磁场的模式变为了圆波导中的TM01模。TM01模的场分布具有轴对称性,无极化简并且波导内壁的面电流只有纵向分量,因此常将这种模式用作旋转关节中的工作模式,其场分布如图2所示。
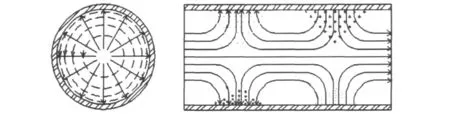
图2 圆波导TM01模的场分布
2.1 圆波导中的传输模式和截止波长分布
圆波导是内壁半径为R的圆形金属管,和矩形波导一样,圆波导有两类传输模式,即TM 模和TE 模。
圆波导中存在无穷多个TMmn模式,在这些模式中,m可以为零,而n不能为零,TM01模是TM 模中的最低次模,其截止波长λc=2.613R。
同样的,圆波导中存在无穷多个TEmn模式,在这些模式中,m可以为零,而n不能为零。TE11模是TE 模中的最低次模,其截止波长λc=3.413R。TE21模是 TE 模中的次低次模,其截止波长 λc=2.057R[1]。
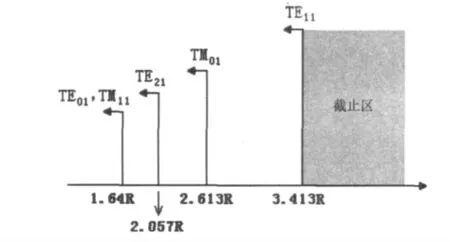
图3 半径为R 的圆波导中的常用模式截止波长分布
圆波导中的三个常用模式即:主模TE11模,次主模TM01模,高次模TE21,其它模式的截止波长均小于TE21模,也属于高次模。它们的截止波长分布情况如图3所示。
2.2 旋转关节结构尺寸的理论设计
假设已知旋转关节的中心工作频率为f0,对应中心工作波长为λ0,矩形波导宽边和窄边尺寸分别为a和b。旋转关节需要设计确定的结构尺寸有:圆波导半径R1、圆波导滤波筒半径R2、圆波导腔体长度L1、圆波导滤波筒长度L2、匹配销与圆波导中心间距L3,如图4所示。
2.2.1 圆波导半径R1与滤波筒半径R2
矩形波导中的TE10模经过矩圆波导垂直过渡可以激励起圆波导中的TM01模,同时由于不连续性,圆波导中还会激励起主模TE11模和其它高次模。
圆波导中高次模的抑制可以通过适当选择圆波导的半径R1来实现[2],使它满足:
2.057R1=λc(TE21)<λ0<λc(TM01)=2.613R1
即:

图4 旋转关节结构
一般的,在初始设计时可选择R1=R2,当仿真结果不能满足要求时,可以稍微缩小滤波筒的半径R2来调配旋转关节的性能。
TM01模不是圆波导中的最低次模,当R1的大小满足上式的取值范围时,圆波导中还可以传输TE11模。由于TE11模的场分布不是轴对称的,因此在旋转过程中TE11模的存在会使旋转关节的输出信号幅相变化很大,应想办法滤除TE11模。这一任务就由两端的圆波导短路圆筒(滤波筒)来完成[3]。
滤波筒工作于驻波状态,它串接于矩形波导与圆波导构成的主传输线上。根据TE11模和TM01模在圆波导中的波导波长不同,可以适当的选择滤波筒的长度,使得:

(式中:m=0,1,2,3…,n=1,2,3…)
根据式(2)和已知的波导波长计算公式:λg0=,选择m和n的不同取值,可以得到滤波筒的半径R2与中心波长λ0的比值关系,如表1所示。
表1 滤波筒的半径R2 与中心波长λ0 的比值关系
根据式(1)可知x的取值范围是:2.057≤x≤2.613,为了更好的抑制TE11模,应选择x 的值尽量接近2.057,因此可以确定x=2.26484,相应的可以得到:

2.2.2 圆波导滤波筒长度L2
根据上面的分析可知,选择X=2.26484 时,m和n的取值分别为1 和0,因此从式(2)可以得到:
TM01模的截止波长λc=2.613R,因此可得:

2.2.3 圆波导腔体长度L1
圆波导腔体的长度L1(两个矩形波导窄边的中心线间距)主要影响旋转关节的工作带宽和旋转稳定性,理论上L1应选择为圆波导TM01模波导波长的一半的整数倍,即:

为了使旋转关节的工作带宽尽可能的宽,L1越短越好,但是当圆波导腔体长度太短时,在矩-圆波导垂直过渡处因为不连续性激励起的高次模不能得到足够的抑制,这些非轴对称性场结构的高次模的传输,会降低旋转关节的功率容量,并影响旋转关节的旋转稳定性;另外,矩形波导的法兰宽度、旋转扼流结构和轴承厚度等也决定了圆波导腔体的长度不能太短,这一限制在C波段以上更为明显。因此,L1理论上的最短长度应该为λg0(TM01)。
实际上,圆波导腔体的长度往往小于理论值,这是因为在矩-圆波导垂直过渡处,由于矩形波导的存在,圆波导的直径实际上是增大了,相应的λg0(TM01)就变小了。矩形波导的口径越大,垂直过渡处的圆波导等效直径越大,圆波导腔体长度缩短的就越多[5]。根据设计经验,圆波导腔体的长度L1应满足:

式中,n=1,2,3…;b是矩形波导的窄边尺寸。
7.2 信息公开透明的特殊要求。公示承包经营者的营业执照、食品经营许可证等资质证明以及食品原料供应渠道及品牌、主要食品原料的成本。
2.2.4 匹配销与圆波导中心间距L3
为了减小电压驻波比,需要在矩形波导内采用对称感性匹配销进行匹配。匹配销可以用矩形膜片,也可以用圆柱销钉。
匹配销与圆波导中心间距L3理论上应该选择为矩形波导TE10模波导波长的一半,即:

实际上L3一般比要大,其具体数值由需要借助仿真软件修正。另外,匹配销的尺寸也需要借助仿真软件来确定。假设采用圆柱匹配销,那么仿真计算还需要确定销钉的直径D和销钉与矩形波导宽边中心线的距离L4。
3 设计实例
根据指标要求,先确定旋转关节各结构尺寸的初始设计参数,然后借助微波电磁场仿真软件HFSS进行仿真设计,修正理论设计的结构参数。
某C 波段高功率旋转关节的指标要求是:频率范围4.25 ~4.35GHz,驻波≤1.2,系统要求选用BJ48 的标准矩形波导作为传输线。
已知条件为:中心频率f0=4.3GHz,矩形波导尺寸a=47.55mm,b=22.15mm。根据上述式(3)~式(6)可以确定初各个初始结构尺寸,借助HFSS仿真软件,可以得到修正值。如下表2所示。
表2 旋转关节初始结构尺寸和修正值
根据修正后的结构尺寸构建旋转关节仿真模型,其驻波仿真结果见图5,图中四根曲线分别是两个矩形波导相对偏转0°、45°、90°和180°时的驻波。
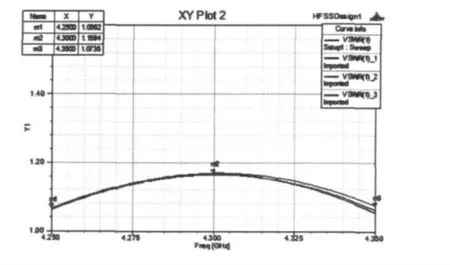
图5 旋转关节驻波仿真结果
实际加工出来的旋转关节的驻波实测结果见图6,图中四根曲线分别是两个矩形波导相对偏转0°、45°、90°和180°的实测值。
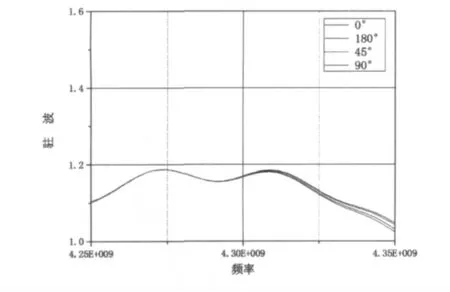
图6 旋转关节驻波实测结果
可以看出,实测结果与图5所示的仿真数据比较吻合,而且实测旋转关节的插损小于0.1dB,插损旋转起伏小于0.05dB,相位旋转起伏小于1°。此旋转关节经过平均功率达20kW 的开机验证,未出现过打火现象,工作稳定可靠。
4 结论
在设计此类带有滤波筒的圆波导旋转关节时,按照本文所述的设计方法和设计公式,可以快速得到基本满足指标要求的各个结构尺寸,同时应用微波电磁场仿真软件HFSS 进行优化设计,就可以省去大量的调试工作并保证一次设计成功,继而获得性能优良的旋转关节实物。
[1]吕善伟.微波工程基础[M].北京:航空航天大学出版社,1995,8:108 ~113.
[2]殷连生.相控阵雷达馈线技术[M].北京:国防工业出版社,2007,12:181 ~182.
[3]顾瑞龙.微波技术与天线[M].北京:国防工业出版社,1980,305 ~306.
[4]尹鹏飞,张成全.圆波导耦合TM01 模旋转关节仿真设计[J].现代电子技术2008,(5):179-180.
[5]朱乙平.大功率圆波导旋转铰链的设计与仿真研究[J].雷达与对抗,2006,(1):57-60.
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:21:56
装备制造技术(2020年1期)2020-12-25 05:18:16
科技视界(2019年19期)2019-08-29 02:58:06
橡塑技术与装备(2018年5期)2018-03-17 07:10:56
长治学院学报(2017年5期)2018-01-05 01:59:51
中兴通讯技术(2017年5期)2017-10-21 19:16:09
西部广播电视(2015年5期)2016-01-16 03:45:07
数字技术与应用(2014年11期)2015-03-23 22:18:15
中国舰船研究(2015年2期)2015-02-10 06:45:55
电波科学学报(2011年4期)2011-05-29 01:20:15