
PWM的整流器无交流电压传感器控制
2012-03-27 02:38张宏杰
常熟理工学院学报 2012年10期
张宏杰
(健雄职业技术学院机电工程系,江苏太仓 215411)
PWM的整流器无交流电压传感器控制
张宏杰
(健雄职业技术学院机电工程系,江苏太仓 215411)
针对采用虚拟磁链定向控制策略的PWM整流器无交流电压传感器控制中存在的由积分环节带来的一系列问题,将滑模观测器(SMO)应用于估测电网电压角度,利用饱和函数代替传统滑模观测器中的符号函数以削弱系统抖振,并对比分析了两种情况下等效控制信号的频谱图,仿真和实验结果表明,基于滑模观测器的PWM整流器具有良好的动静态响应和输入输出特性,验证了所提出的无交流电压传感器控制策略的有效性和准确性.
滑模观测器;PWM整流器;无交流电压传感器;矢量控制
1 引言
三相电压型PWM整流器(VSR)作为一种“绿色”电能变换器,可实现网侧电流正弦化、单位功率因数运行及能量双向流动等功能[1],在高性能变流系统中获得广泛应用的PWM整流器常采用电压定向控制(VOC),需要检测电网电压、输入电流和直流母线电压,由于采用的传感器较多,增加了系统的成本,也带来了相应的检测误差和复杂性[2].无电网电压传感器控制方式的实现方案主要有直接功率控制[3]和矢量控制[3-5],前者类似于交流调速中的转矩控制,存在着开关频率不固定、需要高速模数转换器等不足.实际运用中多采用虚拟磁链定向的矢量控制,通过估计虚拟磁链间接获得坐标变换中所需要的电网电压角度信息.传统虚拟磁链观测方法使用纯积分环节,存在因积分初值选取不当造成的直流漂移问题.文献[2]采用一阶低通滤波器代替纯积分环节,虽然磁链的观测结果不再依赖积分初值,但仍存在幅值和相位误差.文献[4]采用带饱和限幅反馈环节的积分器代替纯积分,利用限幅值消除直流偏移,但是一阶低通滤波器的引入会带来信号的延时问题.文献[5]采用两个低通滤波器代替纯积分环节可以使得输入信号幅值无差且无相移,但是结构复杂,参数不宜整定.
滑模观测器(SMO)由于其鲁棒性强、动态响应快、易于工程实现等优点,在无位置传感器交流调速系统中得到了广泛的应用[6-7].本文结合PWM整流器的数学模型,利用观测电流和实测电流之间的偏差构建滑模平面,当滑模发生运动时观测器的等效控制信号中包含了电网电压信息,以此直接估计电网电压角度,避免了虚拟磁链控制中纯积分带来的一系列问题.相比较调速系统中观测信号的频率随转速变化而言,电网电压频率固定,观测器的结构更简单,得到的角度精度更高,动态响应更快.为了削弱系统的抖振,采用饱和函数替代传统滑模观测器中的符号函数,具有较高的辨识精度.仿真和实验结果验证了所提方法的有效性与正确性.
2 无交流电压传感器矢量控制系统
2.1 αβ坐标系下PWM数学模型
三相电压型PWM整流器主电路如图1所示,其中ea、eb、ec分别为三相电网电压,L是进线电抗器的电感,R为线路与电抗器的等效电阻,Udc为直流母线电压.若三相电网电压平衡,PWM整流器在α-β坐标系下电压方程为

图1 三相电压源型PWM整流器的主电路
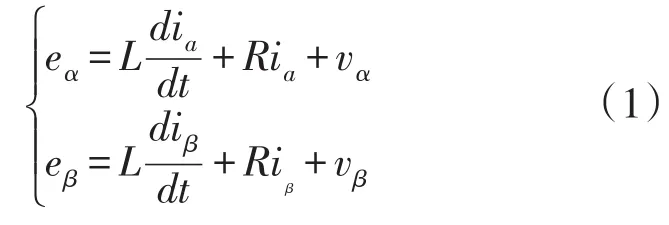
式中
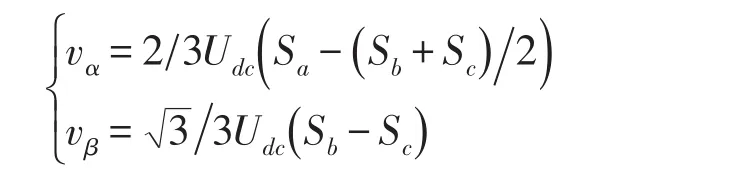
Sa,Sb,Sc是三相桥臂开关函数:其值为1时表示桥臂上管开通,下管关断;为0表示桥臂下管开通,上管关断;eα、eβ,iα、iβ分别为电网电压和电流的α、β分量.
2.2 滑模观测器设计
将式(1)写成状态方程形式

式中vs=[vα,vβ]T,es=[eα,eβ]T.根据滑模变结构控制的基本理论[7],切换函数选取观测电流和实测电流之间的偏差,采用常值切换控制方式且利用饱和函数代替符号函数削弱抖振,构造滑模观测器如下:

式中
由式(3)减式(2)可得观测器电流误差方程为:

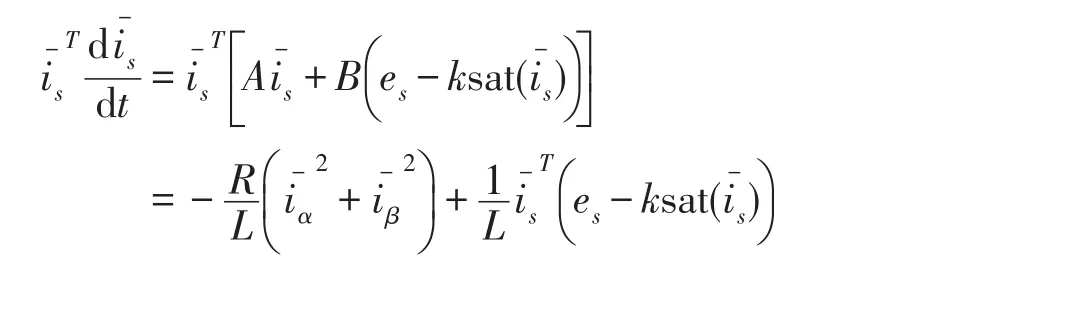
式中
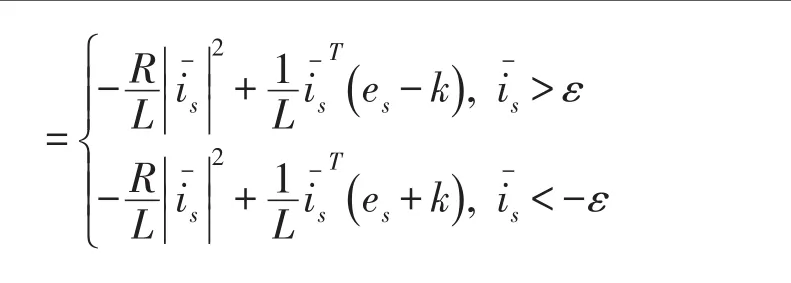
滑模存在条件为k>|es|,当系统运动经过有限时刻到达切换面后,根据等效控制理论[10-11]可得

电网电压角度信息可由下式估算得到

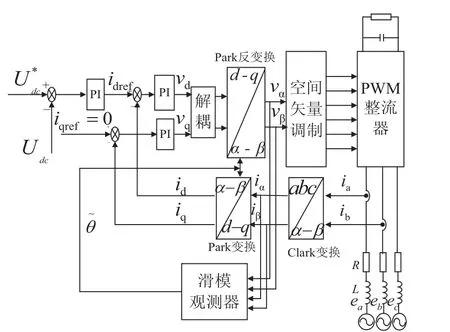
图2 基于滑模观测器的PWM整流器矢量控制框
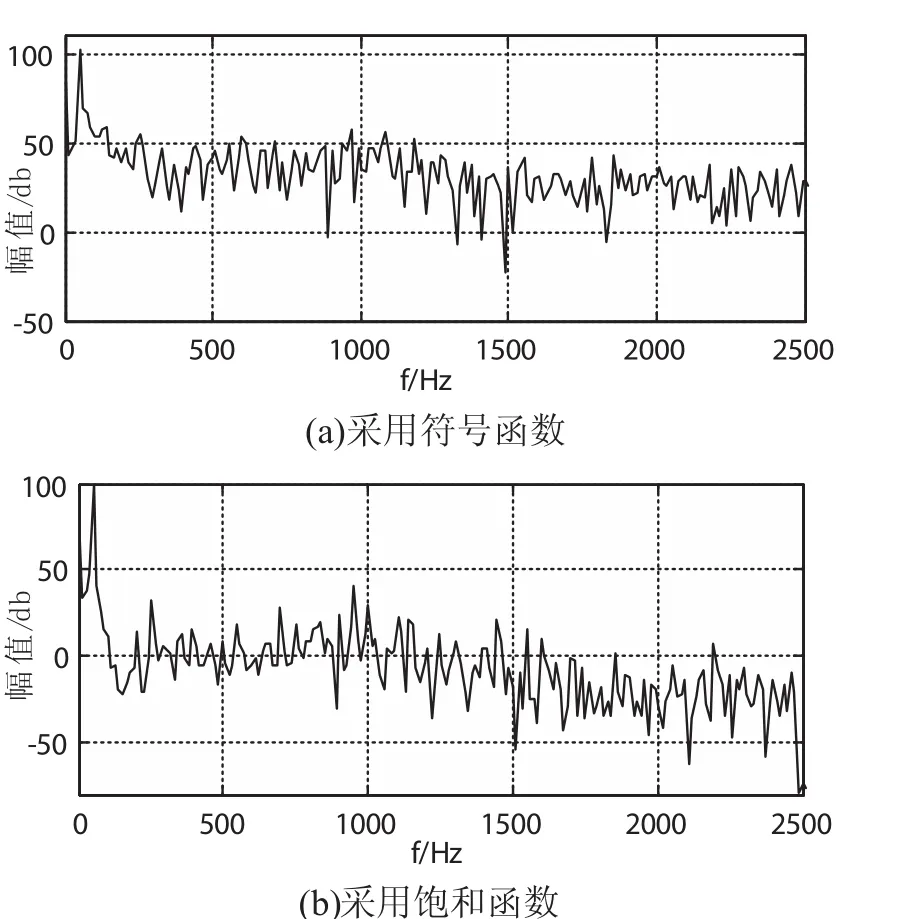
图3 等效控制信号频谱
2.3 PWM整流器矢量控制
图2为基于滑模观测器的PWM整流器矢量控制系统框图.电网电压角度信息通过滑模观测器估算得到,采用电网电压定向的控制策略,直流电压偏差信号经PI调节器后作为d轴电流给定;d、q轴电流偏差信号经过两个电流调节器和解耦控制后经坐标变换作为空间矢量调制的给定.为验证所提出观测器的有效性,实验中采用霍尔电压传感器用于获得准确的角度信息并和估算出的角度进行对比.
3 仿真及实验研究
为验证上述采用滑模观测器估计电网角度信息的无交流电压传感器控制策略的可行性,在Matlab/Simulink环境下搭建了无电网电压传感器控制的PWM整流器仿真模型,并对传统符号函数和采用饱和函数下的滑模观测器等效控制信号的频谱进行了对比仿真分析.仿真参数:进线电抗器电感8 mH,电阻0.5 Ω、直流母线电容2200 μF、直流侧负载电阻100 Ω、交流侧输入相电压有效值30 V,直流母线电压100 V、器件开关频率5 kHz.
图3给出了滑模观测器等效控制型号的频谱.由图3(a)可知,使用符号函数时,等效控制信号中的频谱复杂,左侧第一个峰值为估测电网电压频率,其他峰值都是由抖振信号所引起的干扰频谱,范围较宽且幅值较大,观测器无法直接使用.图3(b)为采用饱和函数后的等效控制信号频谱,相比较符号函数,饱和函数引入了一个厚度为ε的边界层,在边界层内滑模控制是连续的,从而大大削弱了抖振的影响,对高频分量起到明显的抑制作用.图4为利用滑模观测器估测的电网电压角度和电网电压实际角度.由图可知,观测器能够迅速收敛得到电网电压角度,且稳态精度高无滞后.
根据图2搭建了基于滑模观测器的PWM整流器无交流电压传感器矢量控制平台.主电路参数与仿真参数相同,功率器件选择三菱公司型号为PM25RLA120 的IPM,主控芯片采用TI公司的TMS320F28335.
图5为实际电网电压与滑模观测器估测的电网电压波形.图5(a)为实际电压与滑模观测器估测的电网电压,图5(b)为实际角度与滑模观测器估测的电网电压角度.可以看出,估测的电压波形正弦度良好,抖动影响得到了有效抑制,估测出的角度波形光滑且与实际角度一致无滞后.
图6是基于滑模观测控制的PWM整流器直流母线电压波形.其中图6(a)为直流母线电压给定为100 V时,从不控整流到可控整流的启动过程,可以看出直流母线电压能够迅速跟踪给定且实际电压与指令电压相差不太大,启动过程平滑无超调图.6(b)所示为PWM整流器启动和负载突变情况下的直流母线电压波形,可以看出启动后3 s负载电阻从100 Ω突减至50 Ω负载电流变大,电压略有跌落后迅速跟踪给定电压,4 s后负载电阻变为100 Ω,负载电流减小,母线电压略有泵升后迅速跟踪给定值,动态性能良好.图6(c)给出了电压给定值从100 V突变为120 V的直流母线电压波形.
图7为网侧A相电压与电流波形,其中图7(a)给出的是直流电压100 V时,负载电阻由100 Ω突减至50 Ω时交流侧电压电流波形,可以看出,负载突变时网侧电流能够迅速调整维持功率守恒,且能够保持单位功率因数下运行.图7(b)为负载电阻100 Ω,直流母线电压由80 V突变为120 V时网侧电压电流波形,可以看出在这两种情况下PWM整流器具有良好的输入特性和动态响应能力.

图4 估计角度与实际角度
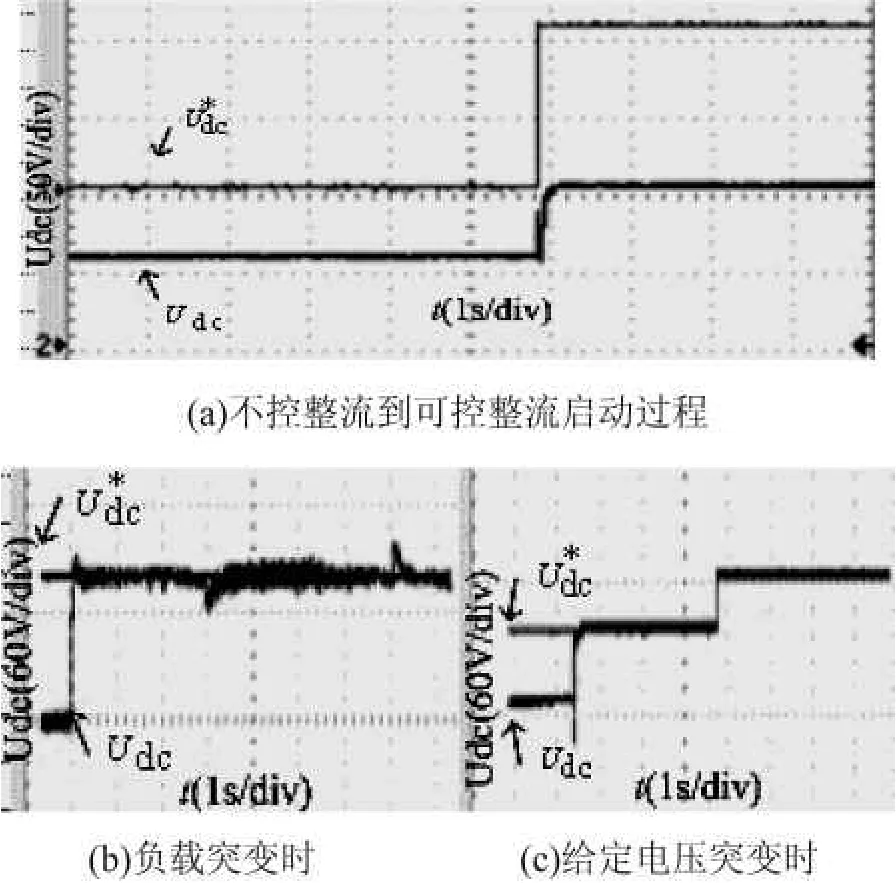
图6 直流电压动态响应

图7 PWM整流器输入特性
4 结论
本文将交流调速系统中广泛应用的滑模观测器应用到PWM整流器中,用以估计电网电压角度,实现无交流电压传感器矢量控制,结论是:(1)该观测器能够准确估测出电网电压角度信息,且鲁棒性强、动态响应快,解决了传统无电网电压传感器控制中纯积分环节带来的一系列问题.(2)使用饱和函数替代传统观测器中的符号函数,削弱了固有高频抖动的影响,提高了角度信息辨识精度.(3)仿真和实验验证了使用滑模观测器的PWM整流器输入、输出动静态特性,实现了无交流电压传感器的矢量控制.
[1]伍小杰,罗悦华,乔树通.三相电压型PWM整流器控制技术综述[J].电工技术学报,2005(12):7-12.
[2]赵仁德,贺益康.无电网电压传感器三相PWM整流器虚拟电网磁链定向矢量控制研究[J].中国电机工程学报,2005,25 (20):56-61.
[3]Toshihiko Noguchi,Hiroaki Tomiki,Seiji Kondo,et al.Direct power control of PWM converter without power-source voltage sensors [J].IEEE Trans on Industry Applications,1998,34(3):473-479.
[4]吴凤江,汪之文,孙力.PWM整流器的改进虚拟磁链定向矢量控制[J].电机与控制学报,2008(05):504-508.
[5]尚喆,赵荣祥,窦汝振.基于自适应滑模观测器的永磁同步电机无位置传感器控制研究[J].中国电机工程学报,2007,27(3):23-27.
[6]鲁文其,胡育文,杜栩杨,等.永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J].中国电机工程学报,2010(33):78-83.
[7]张晓光,安群涛,刘超,等.基于滑模观测器的无传感器永磁同步电机矢量控制系统[J].伺服控制,2010(02):37-39.
[8]Hongryel Kim,Jubum Son,Jangmyung Lee.A High-Speed Sliding-Mode Observer for the Sensorless Speed Control of a PMSM[J]. IEEE Transactions on Industrial Electronics,2011,58(9):4069-4077.
[9]Song Chi,Longya Xu.Position Sensorless Control of PMSM Based on a Novel Sliding Mode Observer over Wide Speed Range[C]. Power Electronics and Motion Control Conference,2006(2):1-7.
[10]Paponpen,Konghirun K M.An Improved Sliding Mode Observer for Speed Sensorless Vector Control Drive of PMSM[C].Power Electronics and Motion Control Conference,2006(2):1-5.
[11]苏健勇,李铁才,杨贵杰.PMSM无位置传感器控制中数字滑模观测器抖振现象分析与抑制[J].电工技术学报,2009(08):58-64.
Vector Control of PWM Rectifier without AC Voltage sensors
ZHANG Hong-jie
(Department of Mechanical and Electrical Engineering of CSI,Taicang 215411,China)
To solve the problems caused by integer which were used in virtual flux oriented control of PWM rectifier without AC voltage sensors,a sliding mode observer(SMO)was designed to estimate grid voltage angle. This paper analyzes the principle,designs steps of SMO.and uses saturated function instead of symbols function in traditional sliding mode observer to weaken the system chattering.The paper also analyzes the equivalent control signal spectrum diagram in the two cases.Simulation and experimental results show that PWM rectifier has a good dynamic/static response and input/output characteristics and verifies the validity and feasibility of the proposed AC voltage sensorless control strategy.
sliding mode observer;pwm rectifier;ac voltage sensorless;vector control
TM301
A
1008-2794(2012)10-0082-05
2012-09-08
张宏杰(1969—),男,江苏东台人,讲师,硕士,研究方向:传动控制.
猜你喜欢
科学家(2021年24期)2021-04-25
防爆电机(2020年4期)2020-12-14
通信电源技术(2016年4期)2016-04-04
铁道科学与工程学报(2015年5期)2015-12-24
电源技术(2015年1期)2015-08-22
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年12期)2015-04-09
电测与仪表(2015年19期)2015-04-09
电测与仪表(2015年5期)2015-04-09
电测与仪表(2014年11期)2014-04-04
