霍尔电推进长寿命试验台测控系统研制
2012-03-16 05:48康小录乔彩霞
火箭推进 2012年3期
邱 刚,康小录,乔彩霞,冯 彦
(1.上海空间推进研究所,上海200233;2.上海凯胜信息技术有限公司,上海200165)
0 引言
由于电推进系统具有高比冲、小推力、长寿命及能重复启动等优点,在航天器姿态控制、轨道转移和保持以及星际航行主推进等领域获得了广泛的应用。霍尔电推进系统以其较高的效率、对大多数推进任务具有几乎最佳的比冲以及较高的可靠性等优势在国外多颗商业和科学试验卫星上使用。霍尔推力器自1971年12月首次飞行应用以来,已有200多台被成功应用于各种航天器上,应用航天器数目超过50个。国内对霍尔电推进技术的研究起步相对较晚,在“九五”中期国家高科技和国防预研计划的支持下,上海空间推进研究所开始霍尔电推进技术的研究与开发,目前已研制出20 mN,40 mN和80 mN霍尔推力器。
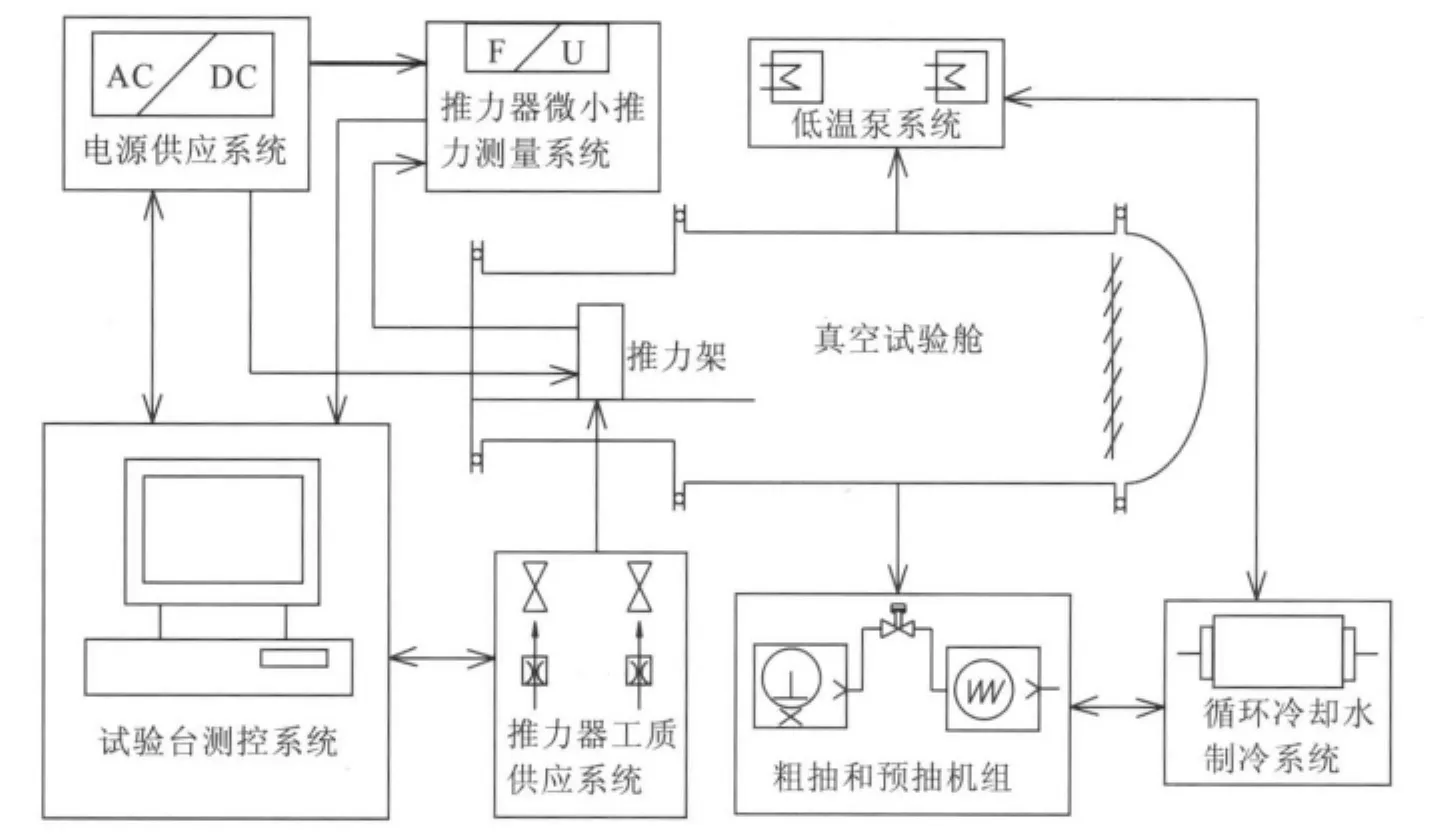
图1 试验台组成示意图Fig.1 Schematic diagram of test bed composition
尽管霍尔电推进系统具备高比冲的优点,但是与化学推进系统相比其推力较小,执行相同总冲的任务霍尔电推进系统比化学推进系统需要更长的工作时间,通常需要数千至上万小时。因此,对霍尔电推进系统的可靠性和长寿命提出了更高的要求。为保证电推进系统空间应用的可靠性,每个型号推力器研制成功后均要在地面开展推力器的1:1寿命验证和鉴定试验。在国内,霍尔电推进系统作为一种新型空间推进系统,其大部分组件包括推力器、推进工质输送与微流量控制系统、功率处理单元(PPU)等都是新研制的产品,没有先期飞行历史和工作经验,因此急需要构建一套霍尔电推进长寿命试验平台为研制过程中的各种性能试验特别是长寿命试验提供基础支撑。由于该试验平台涉及到机械控制、流体控制、配电、实验数据采集及实验平台故障报警等操作,因此有必要研制专用的测控系统,以满足试验平台的自动测控要求,同时提高试验效率,减轻试验人员的工作强度。
本文对霍尔电推进长寿命试验台测控系统的技术指标要求、测控系统硬件设计和软件设计等方面进行了论述,最后通过试验测试验证了测控系统的性能。
1 长寿命试验台对测控系统的要求
1.1 霍尔电推进长寿命试验台的组成
霍尔电推进长寿命试验台主要包括真空试验舱系统、低温泵系统、粗抽和预抽机组、循环水冷却制冷系统、电源供应系统、推力器工质供应系统、推力器微小推力测量系统和试验台测控系统等8大部分。试验台组成示意图见图1。
真空试验舱系统由主舱、辅舱和真空插板阀等组成,用于提供高真空试验环境,真空度可达10-5Pa数量级。辅舱用于安装霍尔推力器微小推力测量架和推力器试验件。真空插板阀安装于主舱和辅舱之间,可以在真空试验舱真空状态下将主舱和辅舱隔离,方便辅舱开启更换试验件或其他部件,关闭辅舱后只需对辅舱进行抽真空而不必重新对整个舱体抽真空。
低温泵作为主抽气泵使真空舱持续保持符合要求的真空度。粗抽和预抽机组主要用于真空舱的初次抽真空,从约105Pa抽空至10-3Pa。循环水冷却制冷系统为低温泵和真空试验舱系统提供符合需求的冷却水,并同低温泵系统和真空试验舱系统进行冷热水交换。霍尔推力器电源供应系统为推力器工作提供所需要的电源;工质供应系统为推力器工作提供工质气体氙气;微小推力测量系统测量推力器点火工作时的推力大小。霍尔电推进长寿命试验台测控系统主要由工控机、信号转换隔离箱和测控仪表等组成,完成对推力器电源供应系统、工质供应系统的测控及推力器微小推力测量系统和真空度测量系统的数据采集,同时监控低温泵系统状态和真空试验舱系统状态。
1.2 测控系统主要技术要求
1.2.1 设备控制要求
工质流量控制器通过模拟接口进行控制,电源供应系统的所有电源均通过数字接口进行控制,需要控制的参量如表1所示。

表1 测控系统控制的参量Tab.1 Parameters controlled by measurement and control system
1.2.2 设备数据采集要求
电源供应系统和监控系统的设备通过数字接口进行数据采集,对工质供应系统、微小推力测量系统、真空度测量系统和低温泵系统的设备通过模拟接口进行数据采集。测控系统需要采集的信号量如表2所示。
1.2.3 系统综合测控精度要求
系统数据采样频率1 kHz,采样精度16位;工质供应系统综合测控精度±2%;电源供应系统综合测控精度±2%;真空度测量系统综合测量精度±2%;微小推力测量系统综合测量精度±2%;低温吸附泵温度测量综合精度0.1%。
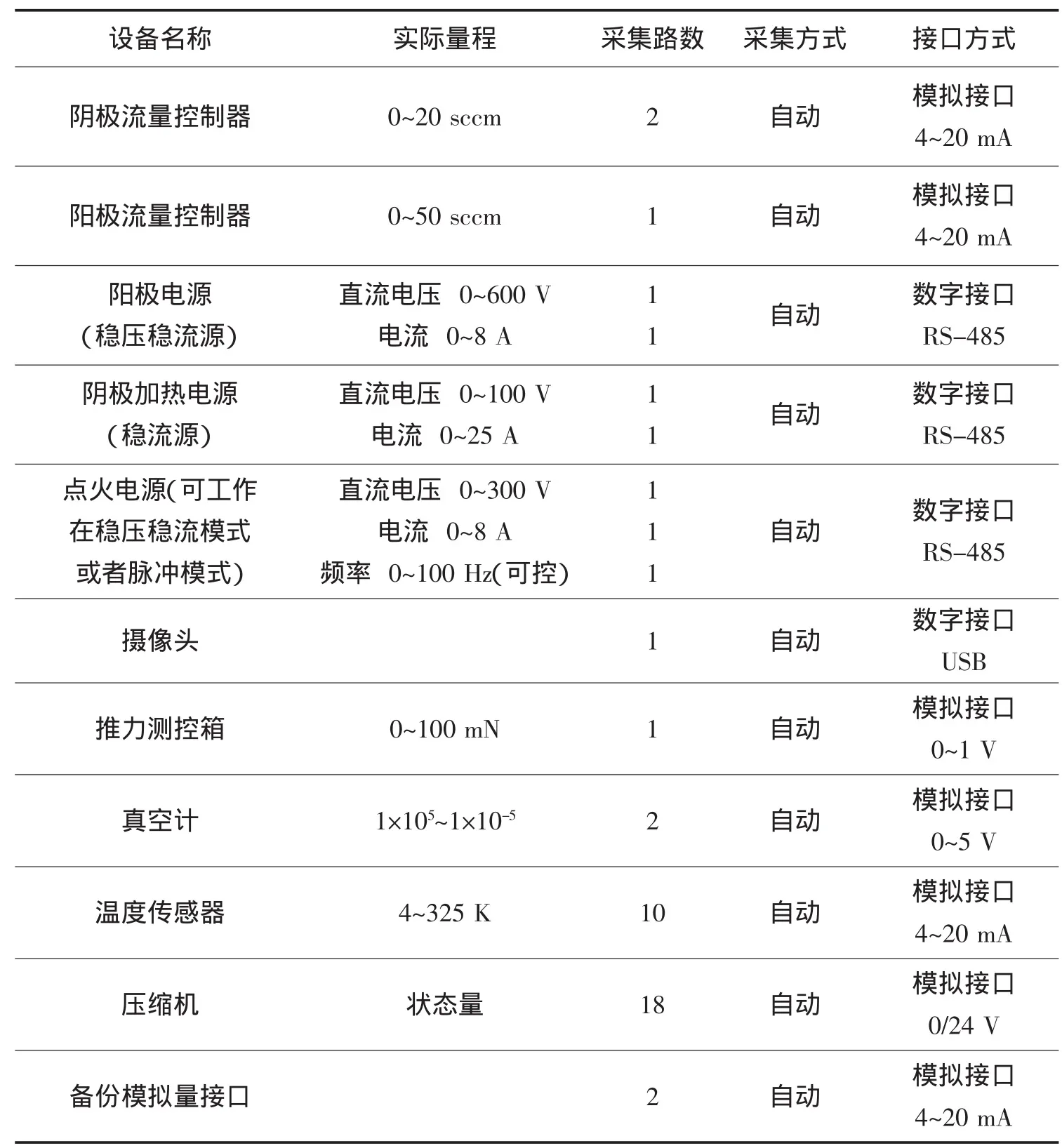
表2 测控系统采集的参量Tab.2 Parameters collected by measurement and control system
2 长寿命试验台测控系统设计
2.1 测控系统的硬件设计
霍尔电推进长寿命试验台测控系统硬件采用外购的基于PCI总线的多通道数据采集卡和模拟量输出控制卡,通过信号转换隔离后完成对电源系统、工质供应系统、真空度测量系统、微小推力测量系统和低温泵系统等的数据采集处理、试验状态监控以及试验台的一体化智能控制。霍尔电推进长寿命试验台测控系统原理框图见图2。
2.1.1 数据采集卡
测控系统选用凌华科技基于PCI总线的DAQ 2205 DAQ数据采集卡,该卡具有64路单端或者32路差动模拟量输入通道,可实现最大程度降噪,输入通道允许单端与差动混合组成。16位AD分辨率采样,最高采样频率500 kHz。1K A/D采样FIFO,2通道12位多路切换模拟输出,24通道可编程数字I/O线及2通道16位通用定时器/计数器,通过SSI总线实现多卡同步。自动校准功能可把增益即偏移量调至指定精度范围。
2.1.2 模拟量控制输出卡
测控系统模拟控制量输出卡选用研华科技基于PCI总线的PCI 1721卡,该卡具有12位4路增强型模拟量输出,每个模拟量输出通道都带有一个12位的双缓冲器DAC,最大更新速率为10 MHz的波形输出功能,可连续高速模拟量输出或者实时波形输出。
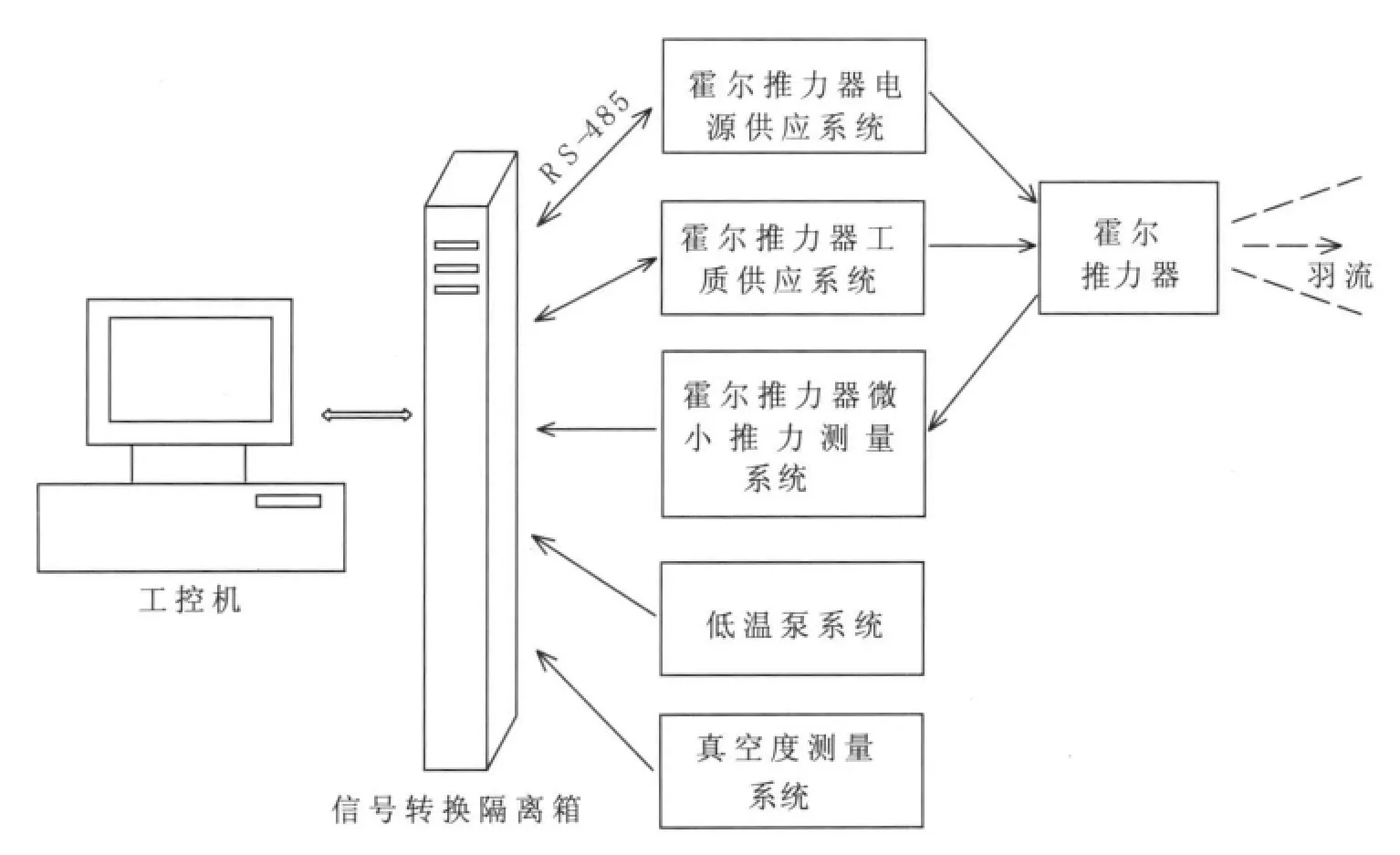
图2 试验台测控系统原理框图Fig.2 Block diagram for measurement and control system of test bed
2.1.3 信号隔离转换
测控系统信号转换隔离箱主要包含:①RS-485转RS-232C转换模块,实现工控机对霍尔推力器电源供应系统的串行通讯;②有源磁隔离栅,实现对模拟输出的控制信号进行隔离和对模拟信号采集进行隔离。
2.1.4 电源系统
电源系统包括阳极电源、阴极加热电源和点火电源,均为Chroma 6200P系列可程控直流电源。该系列电源可在额定输出功率范围内设定恒压(CV) /恒流(CC) 模式,并具有输出精度高,响应速度快等优点。同时Chroma 6200P系列电源具备16位高分辨率的输出电压和电流值的采样回读功能,并配置有RS-232控制接口,具有的I/O口可提供8位TTLs、DC-ON、保护输出信号和远程抑制保护功能以及系统时序量测的输出触发信号,完全能够满足系统对电源的技术指标要求。
2.1.5 工质供应系统
工质供应系统分为推进剂贮供系统和微流量控制系统两部分。推进剂贮供系统用于贮存推进剂,微流量控制系统用于精确控制推进剂的供给量。微流量控制系统中气体质量流量控制器为七星华创D07-7C型,流量显示仪选用D07-7C配套使用的D08-1F型。D07-7C型气体质量流量控制器综合精度为±1.5%,响应时间≤4 s,工作压差为 0.1~0.5 MPa,泄漏率<1×10-8sccs(He)。
2.1.6 真空度测量系统
试验台真空舱真空度的测量选用成都睿宝电子公司生产的ZDF-5227复合真空计。该系列真空计能够满足宽范围真空测量的需要,其中低真空部分用热偶规,高真空部分用电离规。在连续测量过程中,高真空部分可由低真空部分自动启动。ZDF-5227复合真空计具体技术指标如下:
测量范围 1×105~1×10-5Pa;
有效范围 3×103~1×10-5Pa;
测量路数 2路,1路ZJ-52T低真空规管和1路ZJ-27高真空规管安装在同一个测量点;
控制路数 4路;
控制精度 ±1%;
响应时间 <1 s;
模拟输出 0~5 V。
2.1.7 微小推力测量系统
微小推力测量系统由推力测量架和信号调理测控箱组成,推力测量架采用单摆法测量推力器的平均推力,原理示意图如图3所示。信号调理测控箱实时输出0~1 V正比例于霍尔推力器推力的直流电压模拟信号,其综合测量精度为±2%。
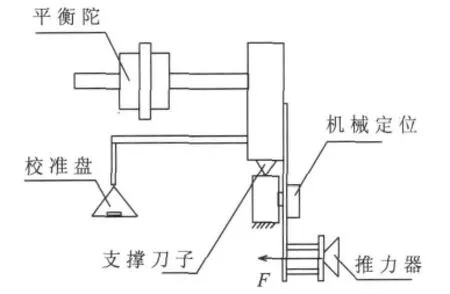
图3 推力测量架原理示意图Fig.3 Schematic diagram of thrust measuring device
2.1.8 低温泵系统
低温泵系统由6台直径为1 250 mm的瑞士HSR低温吸附泵和18台Sumitomo公司的F-70压缩机构成。每台低温吸附泵配备2支温度传感器和1台Elseco 1拖2隔离变送器,将传感器输出的0~5 V正比于低温泵温度的直流电压信号转换成4~20 mA电流信号给温度数字显示仪。低温泵系统温度综合测量精度为0.1%。测控系统利用采集隔离变送器输出的4~20 mA电流信号来测量低温泵的温度。
2.2 测控系统软件设计
霍尔电推进系统试验有3种模式:①阴极激活模式用于在推力器初次点火前对阴极进行除气和氧化层剔除;②性能试验通过单步程序控制方式对试验单项进行试验;③寿命试验通过自动控制程序进行循环寿命试验。
2.2.1 测控系统软件架构
测控系统软件程序采用Delphi7+SQL面向对象的程序设计方法。面向对象 (Object Oriented)是当前计算机软件开发的主要手段,其特点是对象的唯一性、分类性、继承性和多态性。
根据面向对象的设计原则以及本测控软件的任务特点需求,采用了多线程的程序运行模式进行程序设计,并将程序分为3个模块:①通讯服务模块;②流程控制模块;③数据存储模块。3个模块相互独立运行,通过主程序交换数据。
通讯服务模块分为5个子模块:①电源模块;②工质流量模块;③推力模块;④低温泵模块;⑤真空度模块。每个子模块都被封装在一个独立的线程内,按照特定的时间频率(这个时间频率可以是固定的,也可以根据实验任务的具体要求由实验操作者灵活设定)和测控时序要求运行。
流程控制模块分为3个子模块:①阴极激活模块;②性能试验模块;③寿命试验模块。每个模块都被封装在不同的线程中,与电源模块等子模块的工作模式相同。
数据存储模块是专门为数据库定制的数据接口模块,通过数据存储模块可以将数据存储到数据库和从数据库中提取所需的数据。测控系统软件架构图如图4所示。
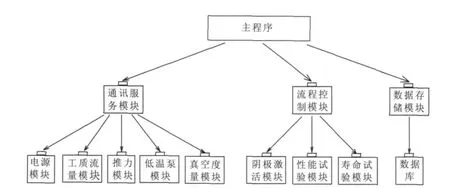
图4 测控系统软件架构图Fig.4 Architecture diagram of measurement and control system
2.2.2 试验故障保护
在霍尔电推进系统试验过程中,测控软件对系统试验过程中的关键状态进行监控,如果发现故障状态,测控软件将对故障进行处理:首先启动声光报警器进行报警,然后关闭所有电源和工质流量供应,将故障现象记入工作过程日志并停止控制程序,但是数据库中的数据记录延续30 s后再停止以便于对故障问题进行后续分析。其中故障状态包括:①霍尔推力器点火成功时间超过设置的阈值;②阳极电流持续超过最大值;③低温泵温度持续超过最大值;④真空度持续超过保护值。
2.2.3 数据库
本测控系统数据库采用MS SQL Server 2000开发。MS SQL Server 2000是微软公司推出的一套在Windows平台上执行的数据库管理系统,其作为应用程序的数据来源存放各种数据,并可以让用户很容易地达成所要进行的数据存取操作,同时它也提供了一些可视化的管理工具,协助数据库系统管理者更方便快速地管理及设计数据库的内容,以及对数据库进行维护。本测控系统数据库中数据库记录文件分为霍尔推力器性能参数记录数据表、参数设置文件表和工作日志记录表3种。
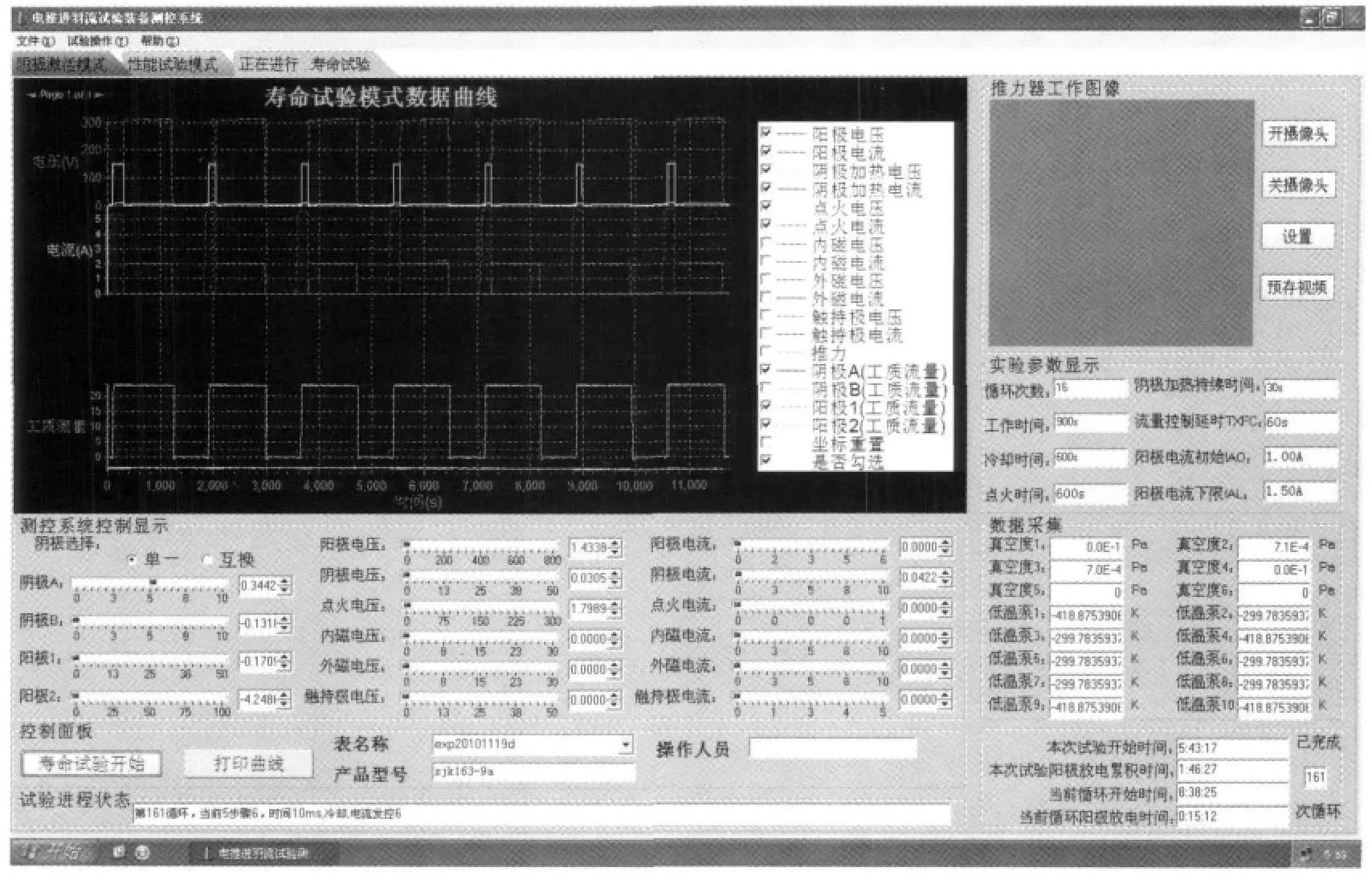
图5 测控系统主界面Fig.5 Main interface of measurement and control system
2.2.4 测控系统软件界面
测控系统软件应用主界面如图5所示。测控系统主界面包含4个功能区:①推力器性能数据显示区通过实时动态曲线直观地显示霍尔电推进系统中电源供应系统的电流、电压值,工质供应系统工质流量值以及霍尔推力器推力大小等参数;②真空系统状态显示区实时动态显示真空系统中压缩机状态、冷却水温度和低温泵温度等参数;③霍尔推力器工作图像实时显示区实时动态地显示工作时的羽流情况;④数据统计区主要包括霍尔推力器单次试验相关时序点时间的纪录,一定工作时间内霍尔推力器试验循环相关数据累积纪录,霍尔推力器试验相关数据汇总统计和霍尔推力器试验历史数据查询。
3 长寿命试验台测控系统性能验证试验
为了验证本测控系统的测控精度,在实际工况下选取了部分具有代表性的测试点对测控系统的技术性能进行了验证性测试,并在40 mN霍尔电推力器长寿命试验中进行了150 h运行测试。鉴于测控系统的综合测控精度主要受系统中需要闭环控制设备的影响,本文只列出了电源供应系统和工质供应系统的部分试验验证数据。电源供应系统试验测试数据如表3所示,工质供应系统试验数据如表4所示。验证试验表明,本测控系统稳定可靠,综合测控精度完全满足霍尔电推进长寿命试验台的测控技术要求。
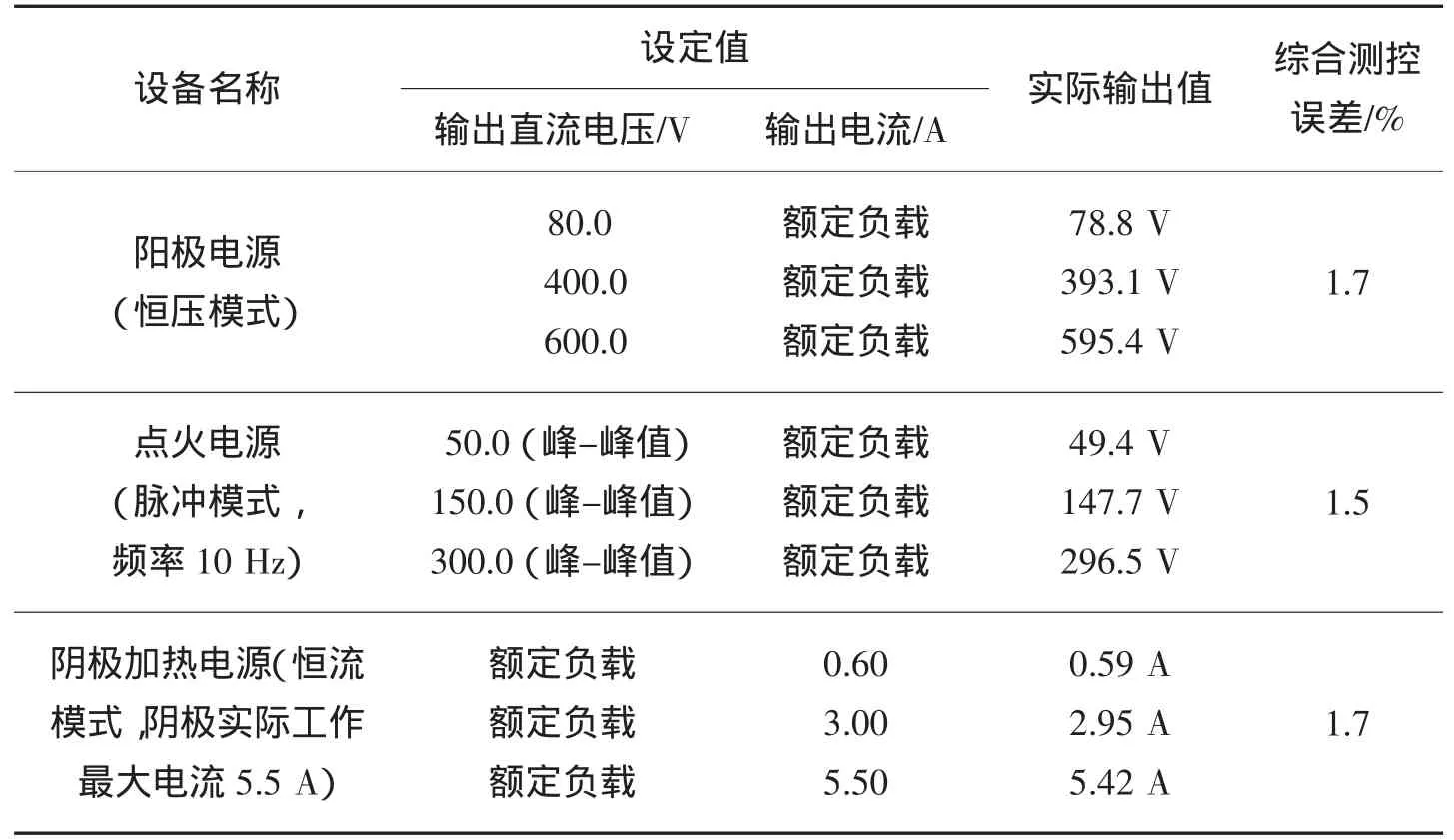
表3 电源供应系统试验测试数据Tab.3 Verified data in test of power supply system
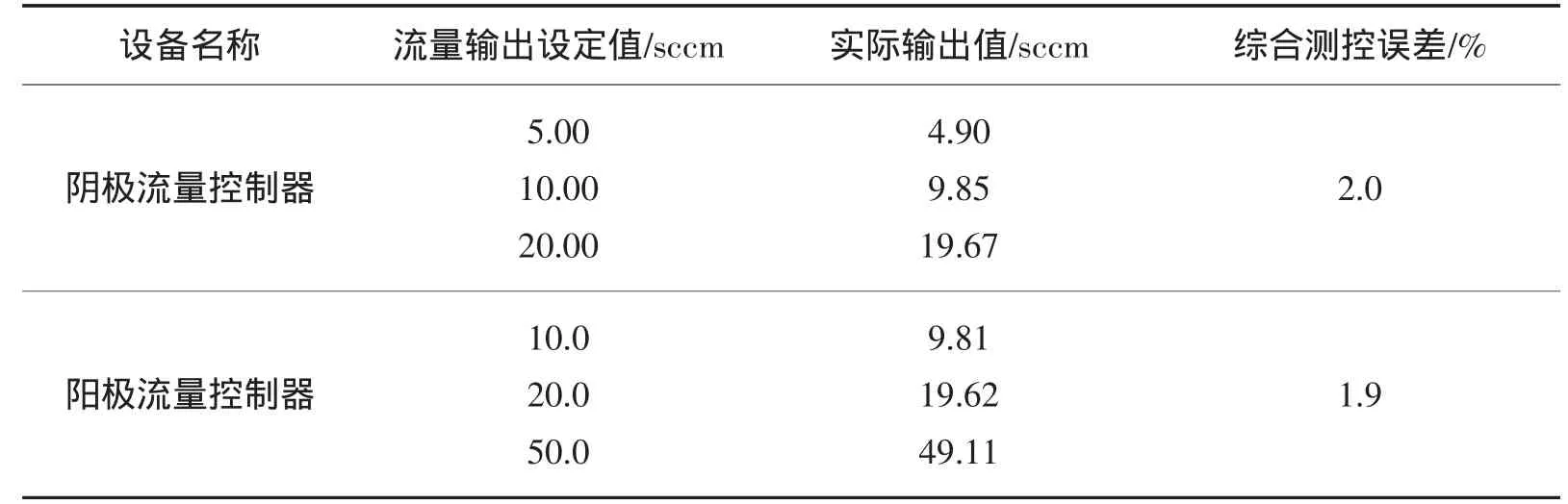
表4 工质供应系统试验数据Tab.4 Verified data in test of fluid supply system
4 结论
针对霍尔电推进长寿命试验平台的实际任务需求,提出并详细论述了基于PC+DAQ2205+PCI1721的测控系统硬件设计和基于Delphi7+SQL的测控系统软件设计,最后通过试验测试表明,本测控系统设计合理,完全满足霍尔电推进长寿命试验平台对测控系统精度、可靠性和人机交互友好性等方面的要求,可为霍尔电推进长寿命试验提供自动化和智能化的测控支撑,并可极大地减轻试验过程中试验人员的工作强度。
[1]GULCZINSKI F S,SPORES R A.Analysis of Hall-effect thrusters and ion engines for orbit transfer mission,AIAA 1996-2973[R].USA:AIAA,1996.
[2]LEIFER Stephanie,NOCA Muriel.Negative C3 launch options for solar system exploration,AIAA1998-3925[R].USA:AIAA,1998.
[3]GULCZINSKIFS,SPORESRA.In-space propulsion,AIAA 2003-2588[R].USA:AIAA,2003.
[4]RANDOLPH T M.Qualification of commercial electric propulsion systems for deep space mission,IEPC-2007-271[R].Italy:IEPC,2007.
[5]张乾鹏.霍尔推力器等离子体羽流特性研究 [D].上海:上海航天技术研究院,2010.
[6]GRYS Kristi de,WELANDER Ben,DIMICCO John,et al.4.5 kW Hall thruster system qualification status,AIAA 2005-3682[R].USA:AIAA,2005.
[7]张乾鹏,康小录.用Xe和Kr作为霍尔电推进工质的比较[J].推进技术,2011,32(6):828-834.
[8]张乾鹏.霍尔推力器羽流离子能量实验研究[J].火箭推进,2010,36(3):10-14.
[9]汪礼胜,唐德礼.阳极层推力器的研究现状与发展趋势[J].火箭推进,2006,32(1):24-29.
[10]宁中喜,张世强,于达仁.低功率变截面通道霍尔推力器电离特性[J].推进技术,2011(6):794-798.
[11]张斌,毛根旺,胡松启,等.固体微推力器气粒两相羽流场的数值模拟[J].固体火箭技术,2011(3):314-318.
[12]牛禄,王宏伟,杨威.用于微小卫星推进装置等离子体推力器[J].上海航天,2004(5):39-43.
[13]张红军,王萍萍,邱景辉,等.小型化电子回旋谐振微波离子推进器研究[J].宇航学报,2007,28(4):209-213.
[14]Kurt A,Thomas E,Boris J,et al.Thruster stand for electric propulsion performance evaluation[J].Review of Scientific Instruments,2006(77):1-9.
[15]John B.Advanced ion propulsion systems for affordable deep-space missions[J].Acta Astronautica,2003,52(2-6):309-316.
[16]Shufan W,Steyn W,Bordany R.In-orbit thruster calibration techniques and experiment results with UoSAT-12[J].Control Engineering Practice,2004(12):87-98.
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
汽车实用技术(2022年11期)2022-06-20
热力发电(2022年2期)2022-03-25
郑州大学学报(工学版)(2021年6期)2021-12-14
燃烧科学与技术(2021年5期)2021-10-28
防爆电机(2021年3期)2021-07-21
空间控制技术与应用(2021年1期)2021-04-25
军民两用技术与产品(2021年10期)2021-03-16
中南大学学报(自然科学版)(2019年2期)2019-03-07
航天器工程(2019年1期)2019-03-06