运输绞车新型深度指示器的设计研究
2012-03-08 07:10王端义李艾民
采矿与岩层控制工程学报 2012年1期
王端义,李艾民
(1.江苏建筑职业技术学院,江苏徐州 221116;2.中国矿业大学,江苏徐州 221116)
运输绞车新型深度指示器的设计研究
王端义1,李艾民2
(1.江苏建筑职业技术学院,江苏徐州 221116;2.中国矿业大学,江苏徐州 221116)
目前我国运输绞车的深度指示器很多都是机械式,依靠绞车操作工的经验来完成牵引距离的判断,测量精度难以得到保证,而国外的设备多采用光感检测元件进行检测,测量精度高,安全可靠。本研究在保证运输绞车传动系统不变的前提下,采用传感器组成的检测控制系统,结构合理,方式简单,数值准确。
运输绞车;深度指示器;设计
Design of New Depth Indicator for Haulage Gear
矿用绞车是一种重要的矿山辅助运输工具,广泛用于矿山人员及物料的提升运输、设备搬运,一般分为矿用调度绞车、矿用提升绞车、双速多用绞车及运输绞车等4种类型。矿用绞车主要用于平巷矿井和倾斜角小于30°的上山、下山巷道内,用于牵引矿车,也可替代调度绞车进行斜井提升。
1 现有深度指示器存在的问题
矿用绞车一般由电动机、变速箱、底座、卷筒和深度指示器等部件组成。其中,深度指示器是绞车重要的组成部件,根据结构不同,可分为机械式和电子式2种类型。目前国内深度指示器多为机械式,依靠滚筒轮缘行星轮系经多级机械传动后显示机械刻度。图1所示的是某矿山设备厂的JYB-50× 1.4运输绞车,其深度指示器使用的就是单丝杠传动。
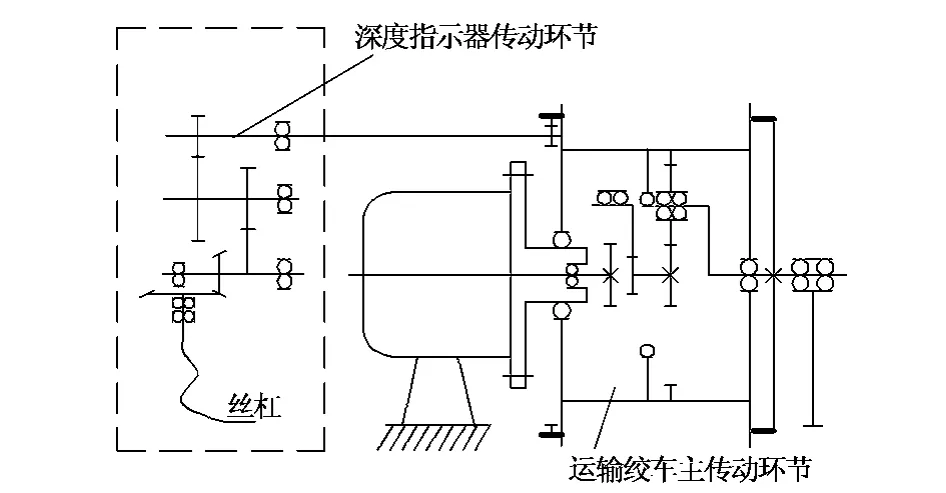
图1 JYB-50×1.4运输绞车传动系统
由图1可知,上述这种机械式深度指示器普遍存在传动链过长、机械结构复杂、标尺刻度精度低等问题,直接影响矿井的安全生产。近年来随着矿山安全生产要求的不断提高,深度指示器的作用和地位也逐渐受到重视,因此研究高可靠性新型深度指示器也日显必要。
2 深度指示器机械结构设计
2.1 新型深度指示器机械结构原理
新型深度指示器为一体式,主要由弹簧、支架、摆臂、滚轮和传感器等组成,结构见图2。其工作原理是,摆臂在弹簧力作用下使滚轮紧靠钢丝绳,绞车转动时,受摩擦力作用,钢丝绳带动滚轮转动,传感器根据滚轮转数,结合滚轮尺寸,换算出钢丝绳运行长度尺寸,进而指示出矿车位置。

图2 一体式深度指示器机械结构
2.2 滚轮在钢丝绳上的滚动机理
如图3(a)所示,滚轮受到钢丝绳摩擦而产生转动,其运动形式为滚动,即滚轮在钢丝绳上进行滚动。假设作用在滚轮圆柱体上的载荷为W,W=G+F(其中G为滚轮重力,F为加压弹簧弹力),滚轮与钢丝绳接触宽度为2a,接触面的分布压力为P(见图3(b))。

图3 滚轮在钢丝绳上的滚动状态
根据赫兹理论,接触面积上距中心线x处的压力为:

考虑接触区x处受压时(图3(b)),将产生一相对于接触区中点O的力矩,其值为Pxdx,因而总力矩

由式 (2)可知,滚轮总力矩与所受载荷、接触面成正比。为了便于设计,多将接触面设定为常数,因此实际产生的总力矩与其所受载荷成正比。
2.3 滚轮设计
滚轮由于受到钢丝绳的摩擦产生滚动,滚轮轴在滚轮结构中只是起到固定轴心作用,承受扭矩较小,所以采用滚子球轴承,主要承受径向载荷。为了滚轮正常运转,应保证滚轮上产生的滚动力矩要大于滚轮轴承的摩擦力矩。
滚动力矩(《机械设计手册》):

式中,k为滚轮摩擦系数 (滚动摩擦=0.1,滑动= 0.15,取0.1);W为滚轮载荷,N;D为滚轮直径(实际测量),mm。
滚动轴承的摩擦力矩为:

式中,μ为摩擦因数 (深沟球轴承取值为0.0015~0.0022,取0.002);W为轴承载荷,N;d为轴承内径,mm。
根据M1>M2的要求,可推出与d有关的各个参数相对关系,从而通过试验设计出滚轮轴。当滚动轴承选取后,再适当予以修正,最后确定出最佳的滚动轴承。
2.4 滚轮减振的方法设计
设计的滚轮与运输绞车的钢丝绳相接触,钢丝绳在滚轮上摩擦后带动滚轮转动,所以钢丝绳速度的变化及载荷的大小,都会使钢丝绳与滚轮产生相对振动。当振幅较大时,钢丝绳与滚轮之间可能会发生互相跳动,产生打滑现象,影响测量结果。
为此设计采用如下减振措施:增添弹簧阻振器,利用弹簧对滚轮的加压,实现对滚轮振动系统消耗做功;增添摆式减振器,利用滚轮支架摆臂的自重作用,达到减振目的。
3 深度指示器检测装置设计
为实现运输绞车深度指示器装置的功能,进行了传感检测装置的设计。首先由传感器获取滚轮的旋转信号,通过软件处理,对滚轮的旋转方向进行辨别,计算滚轮转数,结合滚轮尺寸,就可以换算出钢丝绳下放的长度,进而得出矿车运行的位置。
传感器的增多,将有助于提高测量的精度。对于N个传感器,其测量的最小步长为滚轮周长的1/N。考虑到传感器的尺寸、空间结构布置以及深度指示的精度要求,同时为了达到辨别旋转方向的目的,至少需要3个。本设计选用3个传感器进行测验测量。传感器安装及感应小孔分布如图4。

图4 传感器安装及尺寸
当单片机某一外部中断输入引脚出现脉冲时,即说明有小孔经过传感器,亦即说明滚轮转动了1/3圈。总计数值的加减需要通过旋转方向辨别来确定。为了辨向,对传感器进行编号,同时对传感器产生的中断进行记录。因为小孔是依次经过3个传感器的,所以在某一时刻,只能有1个传感器产生中断,因此可以通过察看另外2个传感器前一次是否产生了中断来辨别方向。比如,当前中断由传感器Ⅱ产生,辨向时,若前一次中断是由传感器Ⅰ产生的,则3个小孔经过传感器的顺序是A→B→C,即顺时针旋转,而若前一次中断是由传感器Ⅲ产生,则3个小孔经过传感器的顺序是C→B→A,即逆时针旋转。
若正转,则总转数计数值增1,若反转,则总转数计数减1。所得计数值实际上是滚轮转过1/3转的个数,因此该计数值乘以滚轮周长的1/3,即可得到钢丝绳下放长度,从而指示出矿车的位置。
此外为了保证装置的可靠运行,必须考虑传感器的反应频率。因为如果钢丝绳的最大线速度超过了传感器允许的速度,测量装置将会失效。为了保证3个传感器都可靠工作,则首先要保证分布直径最大的传感器可靠工作。
设绞车钢丝绳的运行速度为v,滚轮的直径为d0,那么位于分布直径为d1的小孔A(小孔直径为d)经过传感器的时间t为:

设传感器的反应频率为f,则小孔掠过传感器的最小反应时间tmin应该为:

由t≥tmin可得:

式中,滚轮直径d0和分布直径d1可由结构设计得到;钢丝绳运行速度v由绞车的工作能力给出;考虑到成本问题,传感器的反应频率f一般选400Hz,于是可以计算出小孔的直径。
4 结束语
深度指示器为运输绞车的正常运行以及矿山的安全生产提供了重要的保障。本文设计的新型深度指示器是依托微处理器技术及传感器、单片机组成的光电检测系统,通过直接与间接测量相结合的理念进行的研究与设计,相比传统的同类产品,其取消了传动链机械结构,提高了指示精度,降低了设备成本,对提高矿山装备的安全水平具有一定的借鉴和参考意义。
[1]闵付松.新型运输绞车的设计[J].煤矿机械,2007,28 (9):144-145.
[2]曹兆富.调度绞车深度指示器的研究[J].煤矿机械,2007,28(8):132-133.
[3]王海艳.JY60型运输绞车传动系统动态特性研究[D].徐州中国矿业大学,2008.
[4]胡宗武,等.非标准机械设备设计手册[M].北京:机械工业出版社,2002.
[5]蒋 伟.机械动力学分析[M].北京:中国传媒大学出版社,2005.
[6]陈德海.一种新型绞车滚筒的设计[J].林业机械与木工设备,1998,26(2):18-19.
[7]徐州矿山设备制造厂.徐州矿山设备制造厂运输绞车技术资料[R].徐州:徐州矿山设备制造厂,2009.
TD524
B
1006-6225(2012)01-0075-02
2011-09-10
王端义 (1976-),男,黑龙江大庆人,硕士,讲师,主要从事机械设计、煤矿机械和工程控制等方面的教学与研究。
[责任编辑:徐亚军]
猜你喜欢
港口装卸(2022年3期)2022-07-06
中学生数理化·八年级物理人教版(2019年10期)2019-11-25
制造技术与机床(2019年9期)2019-09-10
冰雪运动(2019年2期)2019-09-02
小猕猴学习画刊(2017年3期)2017-07-19
阅读(中年级)(2016年11期)2017-01-23
湖北农机化(2016年1期)2016-03-07
现代制造技术与装备(2015年4期)2015-12-23
中国新技术新产品(2015年9期)2015-07-18
制造技术与机床(2015年10期)2015-04-09