车路协同系统下多智能体微观交通流模型
2012-03-07 09:19:24云美萍杨晓光
同济大学学报(自然科学版) 2012年8期
杨 帆,云美萍,杨晓光
(同济大学道路与交通工程国家重点试验室,上海201804)
车路协同系统(cooperative vehicles infrastructure system,CVIS)是随着信息、通信、交通技术的发展,人们对交通安全和最佳通行的强烈需求而提出的新一代道路交通系统,旨在通过车载设备与路侧系统以及周边车载设备的通信,为驾驶者提供全时空信息,实现车路间的最大协调以及更大限度地提升道路交通系统的安全、通畅与效率.美国交通部在2009年启动的IntelliDrive项目就是CVIS的前身,其提供车对车(vehicle -to -vehicle,V2V)和车对路(vehicle -to-infrastructure,V2I)通信.Shladover等[1]对IntelliDrive中通信的作用归纳为:① 提供史无前例完整而又精确的实时交通信息;② 提供给驾驶员个人目标车速及其他引导信息;③ 车辆可以从邻近车辆获取准确的实时行驶信息,以互相协同而降低所需的空间间隔和发生碰撞的概率.CVIS在此基础上又细化了车辆与路侧单元,包括交叉口信号灯之间的通信,丰富了车辆在行驶过程中的信息获取,是未来交通发展的一个方向.目前包括同济大学、IBM公司在内的许多科研技术单位,已经致力于构建真实CVIS,搭建新一代智能交通网络平台.因此,对于CVIS下交通流特性的研究能够为后续的实践提供理论依据和数据支持,具有重要的指导意义.
CVIS与传统交通环境下的微观交通特性的差异如表1所示.CVIS改变了传统交通系统的运行环境,传统交通流模型已不适应描述CVIS下车辆运行特性.为更好地描述车路系统下车辆的动力特性及决策特性,需建立CVIS下新的微观交通流模型.
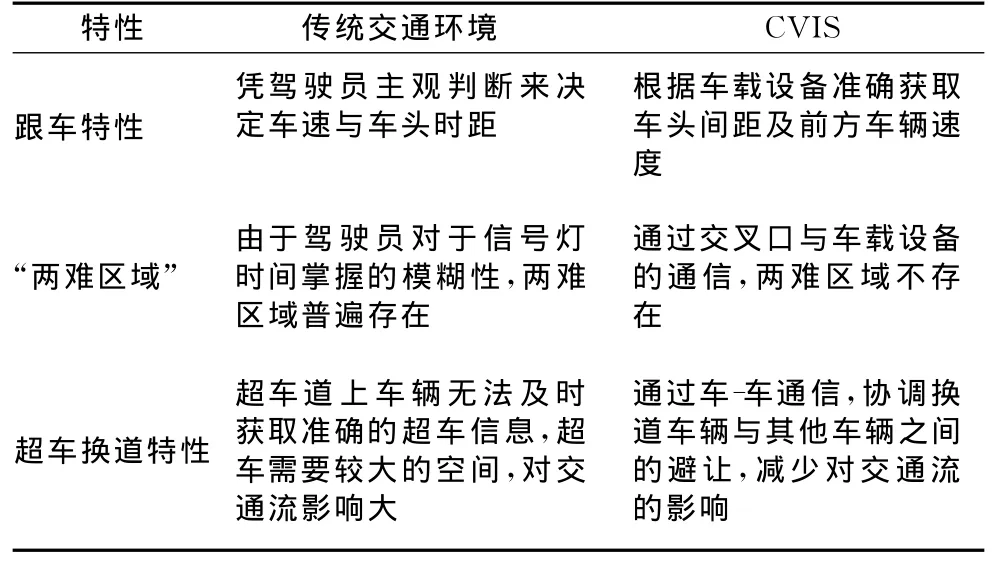
表1 传统交通环境与CVIS下微观交通特性的对比Tab.1 Comparison of microscopic traffic characteristics under traditional and CVIS circumstances
传统微观交通流模型经过多年的发展,目前已形成三类主要交通流模型:以力学模型为基础的跟驰模型、元胞自动机模型和多智能体模型.跟驰模型采用严格的数学方程,可较好地描述单车道高密度非自由状态的交通流,但其与真实的交通流之间存在较大距离,原因就在于现实交通流存在随机性、多变性和复杂性.元胞自动机模型(cellular automata,CA)基于跟驰模型的理论基础,将交通流从时间和空间上离散化,研究交通流的变化特征.然而,CA模型中的规则过于简单,尽管后续很多研究者修改规则,试图使CA模型中的交通流接近真实交通,但仿真的结果与真实交通流特征相距较远[2-7].CA模型多用于研究高速公路上连续交通流的特性,但由于规则中缺少对信号灯的反应机制,因此CA模型在描述间断交通流时的效果并不好.此外,元胞中的车辆单元没有记忆和反馈功能,没有信息元素的参与.而现代交通的发展,信息已经成为交通要素中不可缺少的一部分,无论现在的信息诱导,还是未来的CVIS,信息的参与使现代交通与传统交通在特性和外在上都有了本质的区别.因此,CA模型并不能很好地描述有信息参与的交通流模型,而多智能体则在其基础上,延续和发展了对微观交通流模型的研究.
Jennings等[8]对多智能体系统(multi-agent system,MAS)有一个权威的定义:智能体是一个封装的计算机系统,它处于某个环境中,为了完成设计的目标,能灵活自动地与环境交互.Bomarius[9]曾提出了城市交通的多智能体仿真框架,其中的车辆单元均是使用基于可接受间隙和速度的规则,驾驶员的行为也不真实.Rossetti等[10]利用基于多智能体的框架实现了驾驶员的决策制定过程,Dia[11]利用多智能体建立了驾驶员路径选择行为模型.但他们的研究都没有关注微观交通流模型,而只是从交通管理和控制的角度出发.Mandiau等[12]提出了多智能体协调机制应用于交叉口的仿真.Wei等[13]提出了基于需求分析的多智能体微观交通模拟框架,介绍了智能体微观交通模拟过程,汽车生成模型和汽车跟驰模型.Ehlert[14]提出了用具有反应和竞争行为规则的多智能体微观交通流模型模拟城市道路的交通流.模型展示了从慢速谨慎到快速激进的不同驾驶员类型,考虑了不同驾驶员的特性.Zhang等[15]提出了基于多智能体系统的单车道交通流仿真,并建立了驾驶员-车辆智能体的三层框架以及车辆行为的决策树,从宏观和微观两个角度分析了模型的特性.然而,其数据试验只用了10辆车进行仿真分析,缺少对于大流量、多随机性的交通流特性的分析,并且没有考虑车与车以及车与交叉口之间的通信带来的交叉口对于交通流的影响,这对于描述城市内部交通流特征是不准确的.Dai等[16]利用多智能体进行了交通行为研究,包括加减速、换道以及跟驰等特性.模型还是基于基本的物理数学公式,并没有考虑车辆在实际运行过程中的特性,同时也缺乏对信号灯的反馈模型.马晓凤[17]研究了面向驾驶员特性的多智能体微观交通流模型框架,考虑了驾驶员对于不同外界信息的反馈个性.其中的决策机制采用了元胞自动机的理念,并应用传统的跟车模型和换道模型.
综上所述,利用MAS对交通流的研究已经有了一定的成果,很多研究人员试图从不同的角度利用MAS分析交通流的一些特性.对于车路协同下有信息影响的微观交通流研究并不多,考虑交叉口与车辆信息交互的研究更少.目前车路协同是国家大力扶持和推动的项目,研究在CVIS下的交通流特性,为后续实际应用提供理论基础和技术支持.
本文所研究的CVIS界定如下:车辆由驾驶员控制;每个车辆多智能体(vehicle multi-agent,VMA)可以与前方VMA进行通信,获取前车的精确行驶信息,并将自身交通信息与后车进行通信;VMA还可以与交叉口信号灯进行通信,获取当前相位以及当前相位剩余时间等信息.在本文界定的环境中,驾驶员可以根据获取的准确交通环境信息作出正确的判断和决策.
本文基于传统多智能体微观交通流模型,将信息引入交通模型中,建立CVIS下的微观交通流模型.本文基于以下假定开展微观交通流模型研究:①道路是水平的、直线的、干燥的,不考虑坡度、转弯以及摩擦系数的影响;② 研究单车道交通流模型,不考虑换道和超车现象,车流遵守FIFO原则;③交叉口处只考虑信号灯对车辆行为的影响,暂不考虑其他因素的影响.本文建立CVIS下的VMA模型,提出CVIS下的车辆决策机制,给出车辆加速、减速以及跟驰行为模型;对仿真结果进行分析,表明CVIS较之传统交通环境对出行效率有明显提高.
1 CVIS下车辆多智能体(VMA)模型
1.1 VMA属性
VMA是一个具有自身属性、可移动的微观车辆对象.VMA可以通过与环境之间的信息交互实现对周围环境的感知,并做出相应的反馈行为.在传统交通环境中,VMA对于外界的感知是基于主观判断基础上的,是一种模糊粗糙的感知判断.而在CVIS下,VMA对于外界的感知是基于车-车通信与车-路通信基础上,对于交通运行参数的获取是准确的,因此,是一种清晰准确的感知判断.在对周围环境清晰感知的条件下,VMA应如何对环境条件作出正确合理的反馈是本论文需要研究的内容.VMA的反馈行为是通过其属性值的变化而体现的.VMA属性分为静态属性和动态属性.静态属性是VMA自身所固有的特性,如最大加速度、最高速度等.动态属性是VMA随时间和空间的变化属性值随之变化的特性,如当前车速、当前位置等.Dai等[16]提出VMA属性划分为静态属性和动态属性,但并未细化具体包括哪些属性,仅提到加速属性是最为重要的动态属性.马晓凤[17]提到车辆正常行驶时考虑的包括速度、车头间距等在内的五个属性,但并没有全面考虑车辆在行驶行为中的VMA属性.Lian等[18]也曾提出过类似于VMA的无人机(unmanned airborne vehicle,UAV)模型.但其中的UAV行为选择模式类似于CA模型,将空间和时间离散化,并根据一定的决策机制而运动.本文在前人研究的基础上,进一步提出CVIS下的VMA模型,列举出在CVIS下VMA应具有的属性特征,如表2所示.
1.2 单车道车辆多智能体行为决策机制
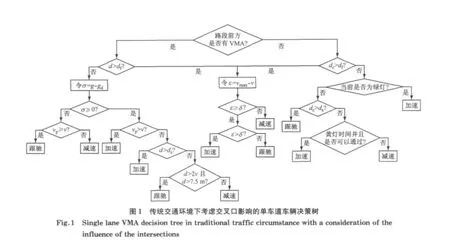
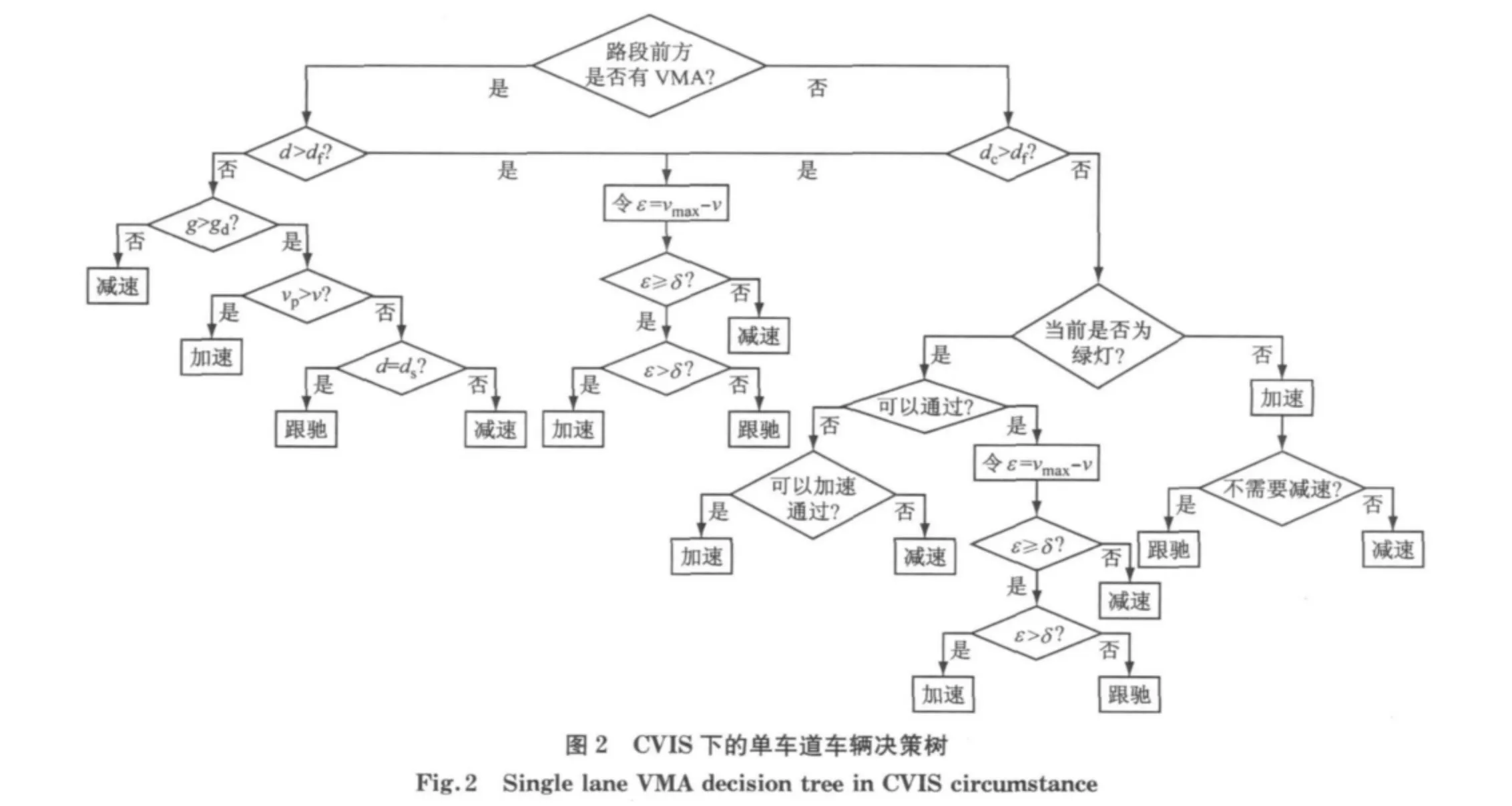
单车道VMA行为包括加速、减速和跟驰.Zhang等[15]提出VMA在道路上的行为分为两步,第一步是选择基本移动策略(加速、减速还是跟驰),第二步是决定加速度(减速度).同时,也提出了在传统交通环境下的单车道VMA决策树,但没有考虑车辆在交叉口处的影响.在其研究基础上,本文提出考虑交叉口影响的单车道VMA决策树,如图1所示.与Zhang等[15]的研究不同之处在于,本文考虑车辆在临近交叉口而前方没有车辆的情况.在这种情况下要根据交叉口信号灯的信息进行判断.图1中,vp是前车车速,v是当前车车速,dc为距离交叉口的间距,g是前后车之间的间距,gd是期望安全间距,它取决于当前速度和驾驶员反应时间.期望安全间距gd=vTp,在现实中,反应时间Tp一般取值1.2 s.ε是当前车速与最高限速vmax之间的差值,δ是其阈值.当ε大于δ时,车辆选择加速;ε等于δ时,车辆选择跟驰;ε小于δ时,车辆选择减速.df是自由行驶间距阈值,df=vTf,其中Tf为自由行驶的车头时距,根据Eissfeldt等[19]的研究,Tf一般取为6s[19].ds是安全行驶间距阈值.与df类似,ds=vTs,其安全车头时距Ts取值为3s.
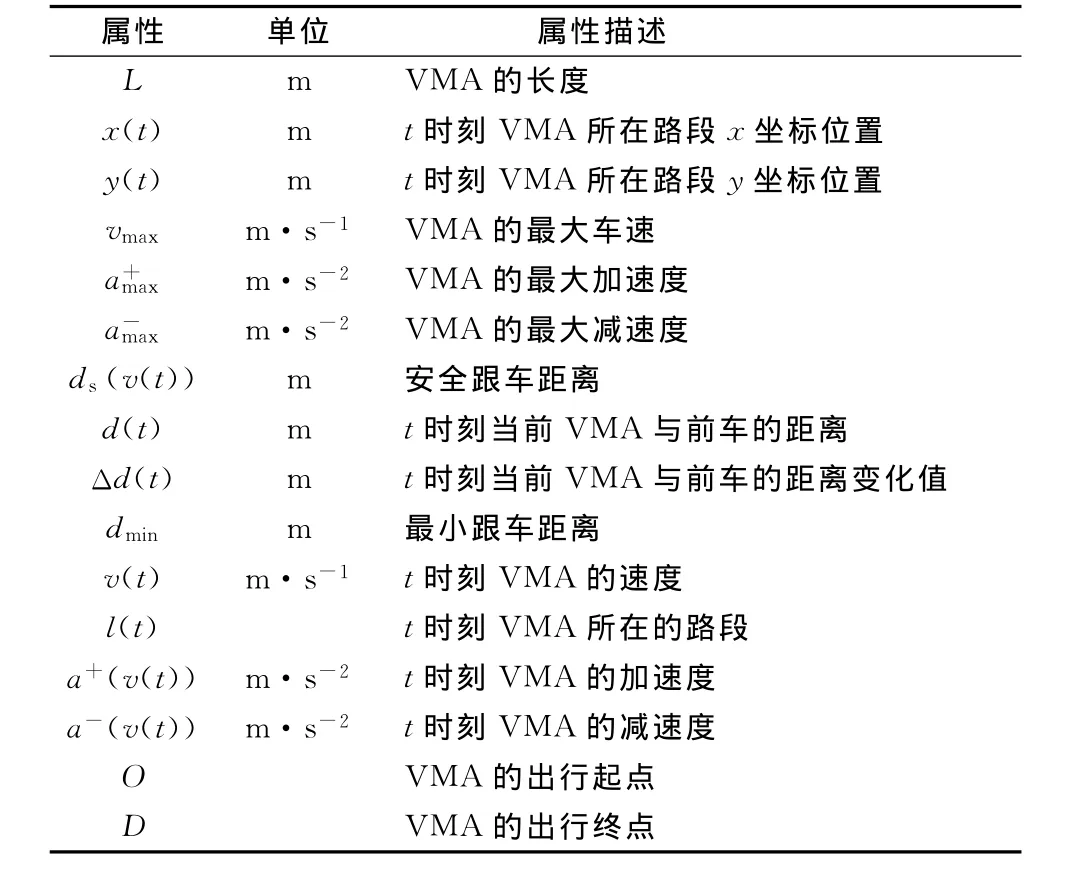
表2 CVIS下VMA属性表Tab.2 Attributes table of VMA in CVIS
在传统交通环境下的单车道车辆决策树基础上,提出CVIS下的单车道车辆决策树如图2所示.CVIS下的决策树与传统交通环境下的决策树最大差异在于对交叉口的反馈.传统交通环境下,驾驶员很难判断当前剩余绿灯时间和红灯时间,特别在没有倒计时功能的交叉口处.在CVIS下,车辆可以获取剩余绿灯时间和红灯时间,如果剩余绿灯时间无法以当前速度或者加速通过时,会给出决策建议,建议驾驶员减速行驶;在当前为红灯时刻而剩余红灯时间内车辆不需要减速停车,驾驶员保持匀速并等待绿灯亮起再加速通过交叉口,因此传统交通环境下的“两难区域”在CVIS中不存在.相比而言,CVIS下车辆在上述两种条件下,在提高行车安全的同时,也减少在交叉口的延误.车辆对于前车的车头时距的判断更为准确,所需要的安全间距减小,道路上的密度随之增加,提高运行的效率.同时,CVIS下车辆跟驰过程中的车速保持和安全间距与传统交通环境下也有明显差异.传统交通环境下的安全间距及实时车速均是由驾驶员主观判断来决定的,一方面容易导致车距太小而产生安全隐患,另一方面容易导致频繁的加速与刹车,造成无谓的能耗损失.CVIS下,车辆在一定的安全车速引导下,可以一个稳定的安全间距进行跟驰.当有若干车辆形成车队后,通过车-车通信和车-路通信使车辆保持一个巡航安全车速,既可以提高运输效率,同时能够降低能耗.
1.3 VMA行为模型
前面提到,车辆在CVIS下的加速、减速和跟驰模型与传统模型有较大差别,下面基于交通工程学的参数标定以及试验测试获取的真实数据建立VMA的加减速模型.
(1)加速模型
Zhang等[15]根据Bham等[20]的研究结果提出了一个加速模型,但模型较为简单,只是根据速度是否达到12.19m·s-1阈值来决定加速度的取值.根据经验,车辆的档位越低,加速度越大,反之,档位越高,则加速度越小.根据《汽车百科全书》上的标定,小汽车在第一档的加速度区间为2.0~2.6m·s-2,而最高档的加速度区间为0.8~1.2m·s-2.以下给出在不同速度下加速度的公式:

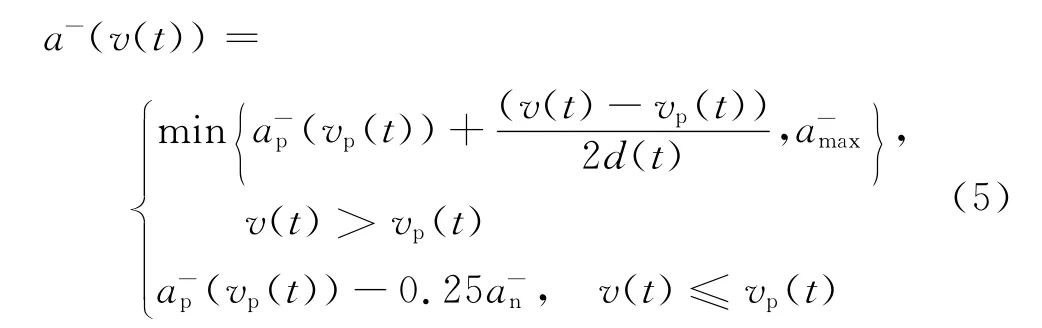
(2)减速模型
如决策树所示,在路段上减速行为需要考虑当前车辆与前方车辆的距离是否小于安全车距.车辆的安全间距与当前速度有关,公式如下:
ds(v(t))=0.012 24v(t)+0.058 45v2(t)(2)
如果当前车距小于安全间距,则需要减速.减速分两种情况,第一种情况是正常情况下的减速,即车辆与前车保持期望间距行驶,车辆减速与前车保持一致车速.此时减速度应为

此外,当前方是信号灯,并且需要减速时,则减速度应为

第二种情况是在紧急情况下的刹车.此时由于前车突然速度变化,导致后车采取紧急刹车行为.在这种条件下的减速度应为
在CVIS下,车辆依然由驾驶员控制,VMA可以提供完整的信息给驾驶员,供驾驶员决策.在这样的情况下,驾驶员的反应时间会影响到减速安全问题.Krauss提出[21],当时间间隔Δt小于反应时间τ时,车速不应超过安全车速,如下所示:

根据上述的决策机制以及车辆加减速模型,可以提出VMA更新机制.考虑到驾驶员个人的随机因素,引入元胞自动机模型中的随机慢化概念,以模拟驾驶员在实际驾驶过程中受一些不确定因素影响而导致的减速行为.更新机制如下:
(1)基于决策树计算加速度(减速度)a.
(2)更新理想速度vi=min{v(t)+a,vmax,vs}.
(3)随机慢化 当车速很低时,驾驶员倾向加速行驶而不会减速,因此当车速很低时不考虑随机慢化作用.当车速较高时,驾驶员以一定概率减速.随机慢化过程如下:

式中:v′是低速阈值,当车速低于此时,VMA将不会采取随机慢化;δ为减速比例,取值为0~1.RD为随机概率,p为0~1之间的随机数.当p小于RD时,VMA将会采取随机慢化.
(4)位置更新 更新车辆的位置,计算x(t+1)=x(t)+v(t).如果x(t+1)超过路段长度,则x(t+1)=x(t)-Lb,Lb为路b段的长度.l(t)修改为当前路段.
2 数值试验
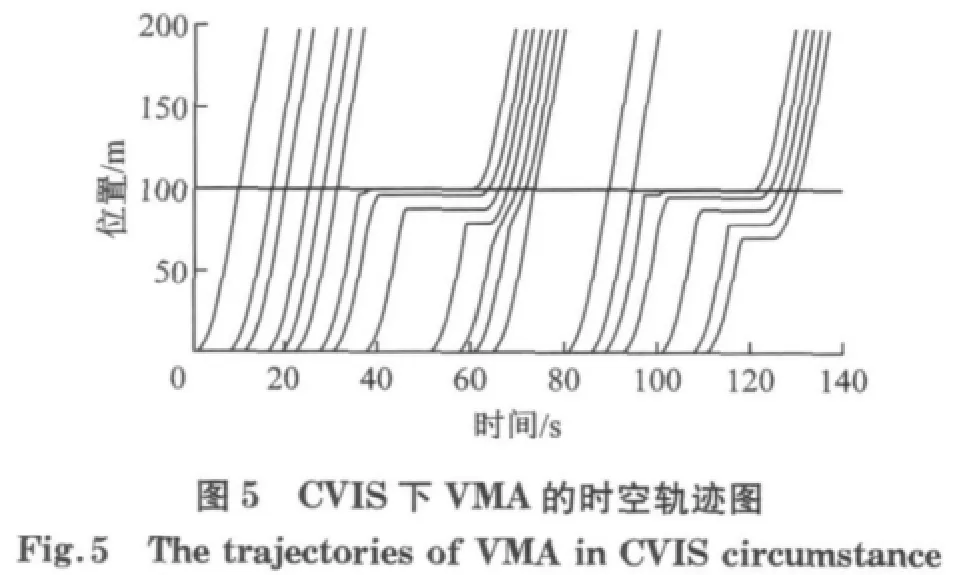
在本章中,将对比分析VMA在传统交通环境和CVIS下的特性和时空轨迹.试验环境如图3所示.O点为起点,D点为终点,点1为交叉口,由两条路段Link 1和Link 2将三点相连.路段属性和交叉口的属性如表3所示.在试验中,随机慢化暂不考虑,因为希望试验的结果能够不为太多随机性的因素所干扰.给出服从参数为0.6负指数分布的VMA生成序列,分析其在两种不同环境中的时空轨迹.图4和图5分别为传统交通环境中和CVIS中VMA的时空轨迹图.
从两张时空轨迹图中可以看出,在这一次试验中,传统交通环境下在交叉口处停车排队的车辆对于后续车辆的影响要明显大于CVIS下排队车辆对于后续车辆的影响,并且传统交通环境下车队的整体行程时间也明显大于CVIS下车队整体行程时间.对每一组VMA进行50次仿真试验,并计算交通流参考属性值,如表4所示.

图3 试验环境Fig.3 Experimental circumstance

表3 试验环境中的路段与节点属性表Tab.3 Table of sections and nodes attributes in experiments

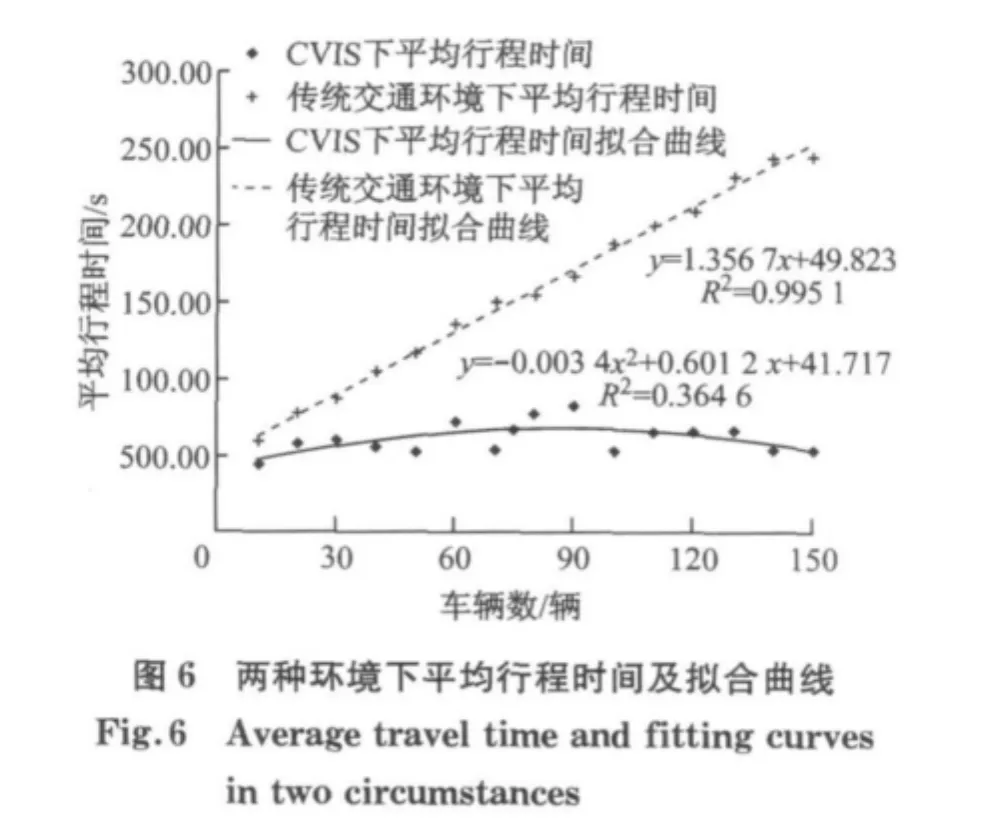
两种环境中的平均行程时间以及车队平均速度变化趋势及拟合曲线如图6和图7所示.平均行程时间减少比例根据下式计算得出:

式中:Anormal和ACVIS分别是传统交通环境和CVIS下的车辆平均行程时间.从图6可以看出,CVIS下车辆平均行程时间少于传统交通环境下的车辆平均行程时间,并且随着车辆数的增加,CVIS下车队平均行程时间增长趋势要低于传统交通环境下车队平均行程时间增长趋势.从图7可以看出,CVIS下车队平均速度要高于传统交通环境中车队平均速度,并且随着车辆数的增加,车队平均速度可以稳定在一个相对较高的速度水平.平均行程时间下降趋势如图8所示.下降趋势拟合为对数函数,随着车辆数的增加,CVIS下的平均行程时间将大幅降低,将优于传统交通环境中的运行状态.

从宏观上观察道路上流密速的关系,并对两种环境下的交通流特性进行分析,如图9和图10所示.在传统交通环境下,密度与流量的关系呈现出反λ的关系,表现出亚稳态和回滞现象.在CVIS下,密度与流量的关系呈现出一种放射状,其形态和特征与传统交通环境中的密度与流量关系有差异.究其原因,在CVIS中,车辆可以保持一个优化的车头时距以及速度,在大部分时间内,车辆都处于自由行驶状态,落在阻塞流部分的状态很少,因此使得密度与流量关系呈现出与传统交通环境下的不同特征.从定性的角度去分析两者的差异和各自的特征,将是后续研究的一个内容.
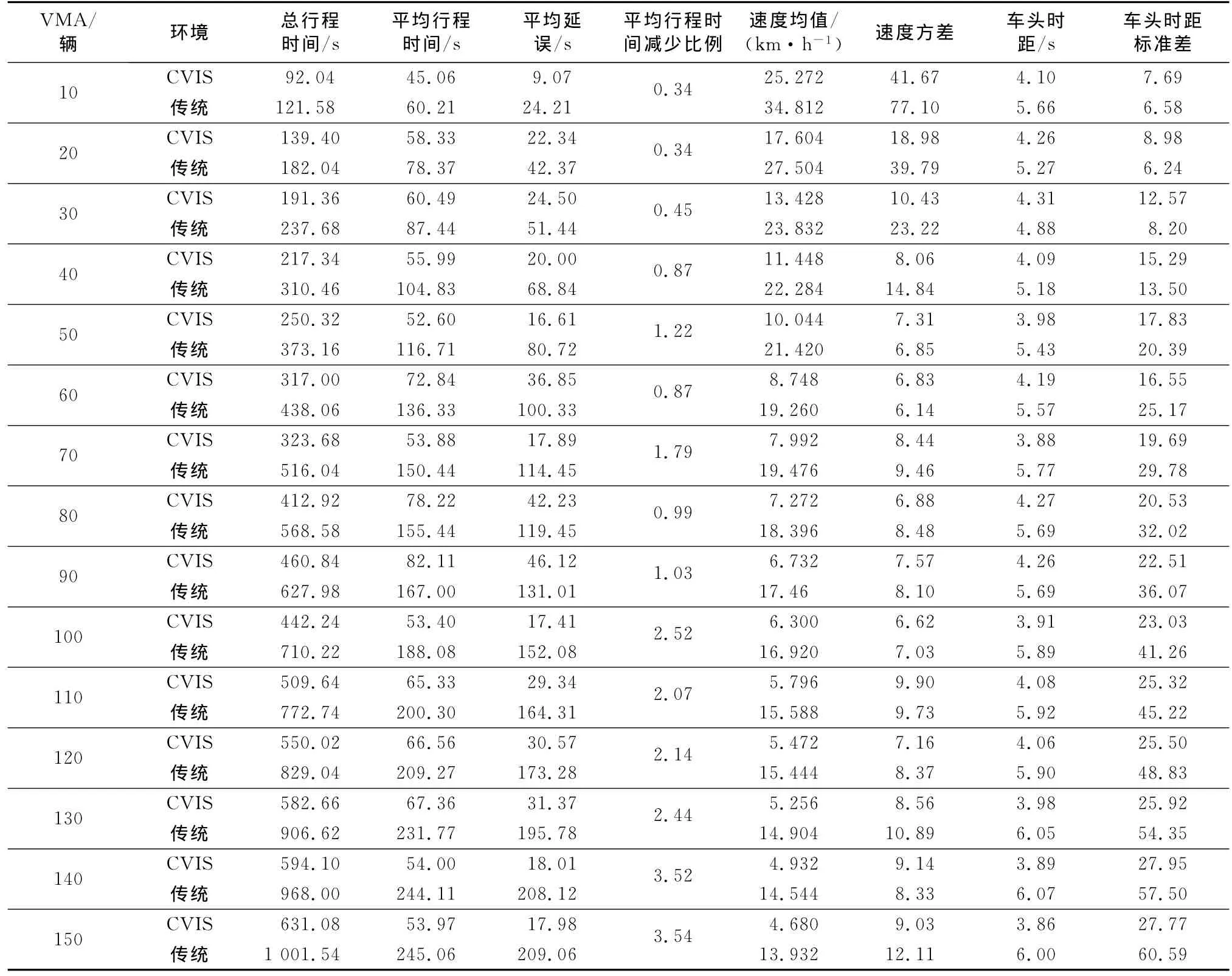
表4 两种不同环境下的交通流参考属性值Tab.4 Traffic flow reference attribute values in two circumstances
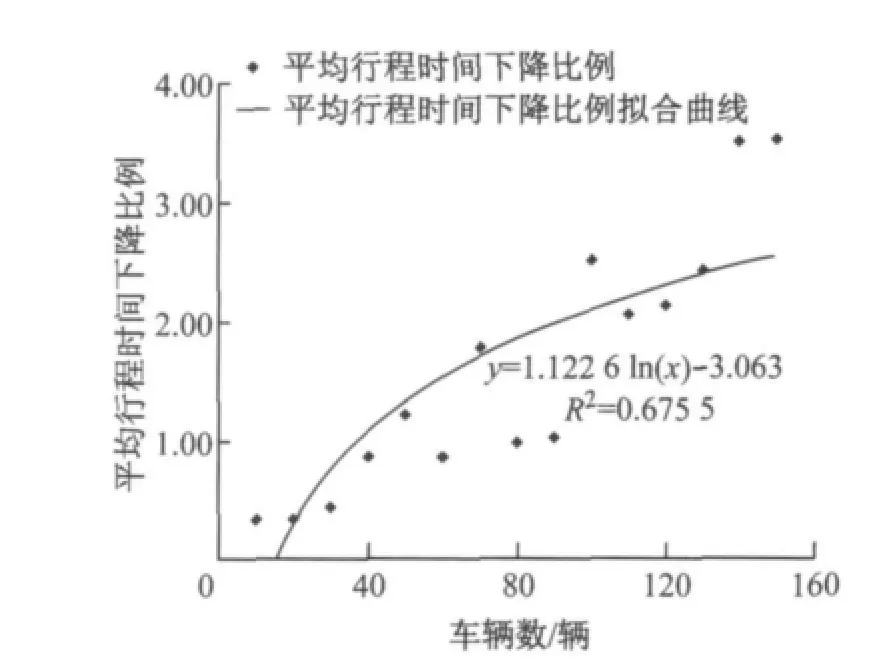
图8 平均行程时间下降趋势及拟合曲线Fig.8 Average travel time decline and fitting curve

图9 传统交通环境下密度与流量关系图Fig.9 Density-volume in traditional trattic circumstance
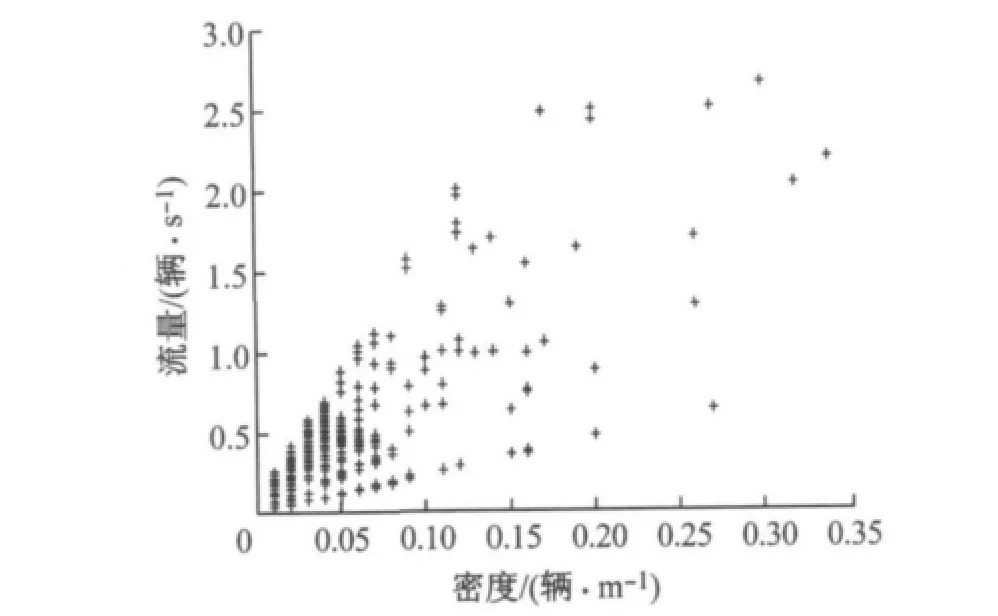
图10 CVIS下密度与流量关系图Fig.10 Density-volume in CVIS circumstance
3 结论与展望
(1)充分利用道路空间,由于对车头间距的精确获取,车辆可以在尽可能小的安全车头间距下,以最快速度行驶,此时通行能力能够大大增强.
(2)CVIS下车辆在交叉口处的延误要明显小于在传统交通环境下交叉口处的延误.由于车辆在CVIS下不仅知道当前相位,而且还知道当前相位剩余时间.相比于传统交通环境下有绿灯倒计时功能的交叉口而言,CVIS下还拥有红灯倒计时,这样就减少了由于红灯而产生的不必要的减速.同时,在CVIS下,黄灯时间归于绿灯时间内,从而“两难区域”不存在,保证了车辆在交叉口处速度的连续性和平稳性.
本文从理想的试验环境出发,没有考虑道路的坡度、转弯以及摩擦系数等不确定性因素,随机慢化概率也没有深入研究和讨论.在后续研究中,将继续展开对相关因素的讨论和分析.现实路网中这样的单车道路段并不多,大多存在多车道的超车换道等特性.因此,在后续的研究中,以单车道交通流模型为基础,扩展至多车道交通流模型,丰富完善基于多智能体的微观交通流模型.
[1] Shladover S E,Lu X Y,Cody D.Development and evaluation of selected mobility applications for VII:concept of operations[R].Berkeley:Institute of Transportation Studies of University of California,Berkeley for California PATH Program,2008.
[2] Takayasu M,Takayasu H.1/f noise in a traffic model[J].Fractals,1993,1(4):860.
[3] Benjamin S C,Johnson N F,Hui P M.Cellular automaton models of traffic flow along a highway containing ajunction[J].Journal of Physics A,1996,29:3119.
[4] Li X B,Wu Q S,Jiang R.Cellular automation model considering the velocity effect of a car on the successive car[J].Physical Review E,2001,64:066128.
[5] Jiang R,Wu Q S.Cellular automata models for synchronized traffic flow[J].Journal of Physics A,2003,36:381.
[6] Kerner S B,Klenov L S,Wolf E D.Cellular automata approach to three-phase traffic theory[J].Journal of Physics A,2002,35:9971.
[7] Lee H-K,Barlovic R,Schreckenberg M,et al.Mechanical restriction versus human overreaction triggering congested traffic states[J].Physical Review Letters,2004,92:238702.
[8] Jennings N R,Wooldridge M J.Agent technology:foundations,applications,and markets[M].Berlin:Springer-Verlag,1998.
[9] Bomarius F.A multi-agent approach towards modeling urban traffic scenarios[R].Kaiserslautern:German Research Center for Artificial Intelligence,1992.
[10] Rossetti R J F,Bordini R H,Bazzan A L C.Using BDI agents to improve driver modeling in a commuter scenario[J].Transport Research Part C:Emerging Technologies,2002,10:373.
[11] Dia H.An agent-based approach to modeling driver route choice behavior under the influence of real-time information[J].Transport Research Part C:Emerging Technologies,2002,10:331.
[12] Mandiau R,Champion A,Auberlet J M,et al.Behavior based on decision matrices for a coordination between agents in a urban traffic simulation[J].Applied Intelligence,2008,28:121.
[13] Wei Y,Han Y,Fan B.Agent-oriented urban traffic micro simulation system[C]//Proceeding of the 8th International IEEE Conference on Industrial Technology,Chengdu.[S.l.]:IEEE,2008:1-7.
[14] Ehlert P A,Rothkrantz L J M.Microscopic traffic simulation with reactive driving agents[C]//2001 IEEE Intelligent Transportation Systems Conference Proceedings.Oakland:IEEE,2001:861-866.
[15] Zhang F,Li J L,Zhao Q X.Single-lane traffic simulation with multi-agent system[C]//Proceeding of the 8th International IEEE Conference on Intelligent Transportation Systems.Vienna:IEEE,2005:1183-1187.
[16] DAI Jicai,LI Xia.Multi-agent systems for simulating traffic behaviors[J].Chinese Science Bulletin,2010,55(3):293.
[17] 马晓凤.基于Multi-Agent的微观交通流建模与仿真[D].武汉:武汉理工大学,2008.
MA Xiaofeng.Microcosmic traffic flow modeling and simulation based on multi-agent[D].Wuhan:Wuhan University of Technology,2008.
[18] Lian Z T,Deshmukh A.Performance prediction of an unmanned airborne vehicle multi-agent system[J].European Journal of Operational Research,2006,172:680.
[19] Eissfeldt N,Wagner P.Effects of anticipatory driving in a traffic flow model[J].European Physical Journal B,2003,33:121.
[20] Bham G H,Benekohal R F.A high fidelity traffic simulation model based on cellular automata and car-following concepts[J].Transportation Research Part C:Emerging Technologies,2004,12:1.
[21] Krauss S.Microscopic modeling of traffic flow:investigation of collision free vehicle dynamics[D].Cologne:University of Cologne,1998.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
西南交通大学学报(2016年3期)2016-06-15 20:29:35
公民与法治(2016年4期)2016-05-17 04:09:26
中国房地产业(2016年2期)2016-03-01 01:25:37
中国工程咨询(2016年1期)2016-02-14 06:47:44
系统工程学报(2015年3期)2015-02-28 19:54:01
数学年刊A辑(中文版)(2014年1期)2014-10-30 01:48:12
河南科技(2014年14期)2014-02-27 14:12:02