
HILS技术在水雷控制系统设计中的应用
2012-03-07 06:22蒋平陆晓明
舰船科学技术 2012年7期
蒋平,陆晓明
(中国船舶重工集团公司第七一○研究所,湖北宜昌 443003)
0 引言
随着微机技术的发展和现代控制理论的进步,水中兵器发展到了一个新的阶段,具备远程打击、精确制导能力的武器才能成为佼佼者。水雷作为具有战略威慑的水中兵器,有着极其重要的地位。然而,传统的水雷,其“守株待兔”的作战方式已经跟不上现代战争的脚步,新一代水雷武器的研制正朝着高机动性、精确打击、不受水深限制、布放方式多样化的方向发展。作为水雷总体技术中的核心部分,水雷的控制系统无疑有着重要的地位,其主要功能是根据水雷航行与攻击过程中的弹道要求控制弹体,使其按规定的弹道运动,无论是攻击的快速性、精确性或者是隐蔽性、抗干扰性,都跟控制系统的效能息息相关。
半实物仿真(Hardware in the loop simulation,HILS)指在整个仿真回路中包含一部分硬件的仿真。与传统的纯数学仿真相比,HILS在其整个系统中接入了一部分实物,因此仿真结果往往具有很高的置信度;同时,由于部分真实的设备、产品参与了整个仿真过程,这也有助于对这部分硬件进行性能考察,从而使部件能在满足系统整体性能指标的环境中得到检验。对水雷控制系统进行半实物仿真,全面评价水雷弹体控制特性,可为水雷控制系统设计及评价提供有力的依据,可有效提高系统设计的可靠性和研制质量,降低系统的研制周期和研制经费。
1 水雷控制系统基本组成
随着精确制导等性能的要求越来越高,水雷的控制系统也越来越复杂,控制系统包含的设备有航行控制器、导航设备、舵机、敏感元件等。
导航设备则提供弹体的方位、速度参数;航行控制器根据水雷弹体的方位、速度以及目标的方位、距离进行操舵舵角解算;舵机单元则根据航行控制器解算的操舵舵角和实际舵角进行闭环控制,输出系统所需要的操舵角,使弹体偏转;敏感元件则获取水雷弹体的姿态参数和环境参数。
2 HILS结构组成
HILS结构(如图1所示)由3部分构成:①仿真计算机用来进行动力模型的设计及运行程序、处理数据;②环境模拟设备包括运动仿真器、角运动仿真器、目标特性仿真器等仿真设备;③被测实物一般指控制微机板、传感器、执行机构等硬件设备[1]。
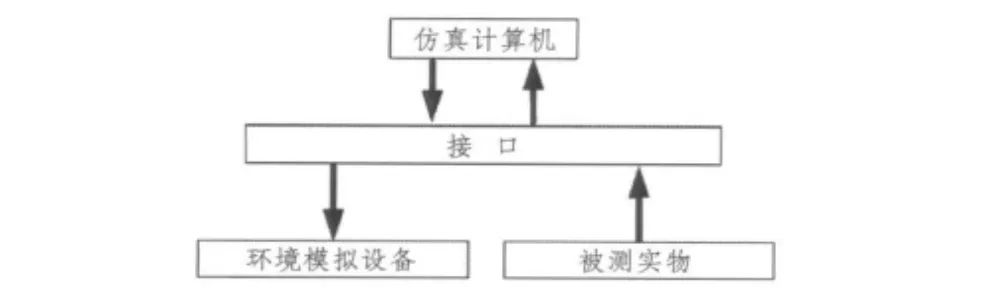
图1 HILS结构图Fig.1Structure of HILS
3 水雷控制系统的HILS功能设计
水雷控制系统的半实物仿真试验,要求能为水雷控制系统提供真实的工作环境,并充分模拟不同的工作条件,以检验系统的各种功能和可靠性。具体表现在实现如下功能[2]:
1)进行水雷的6自由度非线性模型仿真解算;
2)通过数字舵机返回的通信报文,获取实时的横舵、直舵角值;
3)通过深度模拟装置模拟水雷航行的深度,并通过压力传感器读取;
4)通过三维运动模拟器实时模拟水雷的运动航行和姿态;
5)通过惯性测量组合和仿真计算机记录下航行轨迹。
4 水雷控制系统的HILS系统构成
为了实现上述功能,在进行水雷控制系统HILS设计时,必须包括以下设备[3]:
1)DSPACE实时仿真系统,主要功能是仿真控制对象和环境;
2)MATLAB仿真工作站,主要功能是建立水雷控制系统的数学模型;
3)FLUENT仿真工作站,主要完成弹体特性分析、流体动力性能分析;
4)三轴转台,通过转台的3个轴的转动,模拟水雷的航行姿态变化,形成逼真的水下运动环境。
5)深度模拟器,通过压力的变化调节,为水雷控制系统的深度传感器提供深度信息;
6)航行控制器,基于微机板的航行控制硬件结构,通过接收到的目标、自身的速度和信息进行姿态解算,解算出控制舵角操舵指令后发给数字舵机;
7)数字舵机,作为航行控制系统的执行机构,通过操纵横舵、直舵和差动舵3个舵面来实现导引航行;
8)装定器,通过串行通信口发送虚拟目标信息;
9)惯性测量系统,提供水雷的实时方位及速度信息,并记录下弹道轨迹。
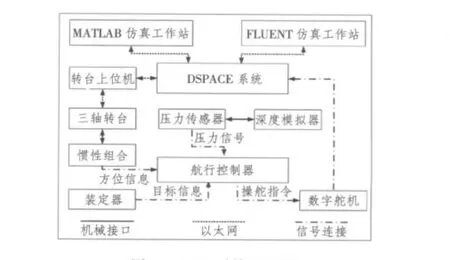
图2 HILS系统原理图Fig.2Schematic of HILS system
5 水雷控制系统的HILS工作原理
由上述仿真设备和部分实物组成的HILS系统结构图如图2所示,其工作原理如下:系统上电后,装定设备向航行控制器发送虚拟目标信息,航行控制器随即根据目标信息进行舵角控制律的解算,解算出合适的操舵指令后发给数字舵机伺服系统,数字舵机开始进行操舵,舵角信息反馈至DSPACE系统控制对象模型,该系统根据水雷的模型和运动学方程计算出水雷的实时姿态信息,并输出至三轴转台,三轴转台随即开始进行转动,模拟水雷的真实姿态变化,惯性测量组合则不断解算出水雷的航行轨迹,并将水雷的方位、速率信息发送给航行控制器,并记录下水雷的航行轨迹,最后,将运动曲线显示在屏幕上,并计算相关的超调量、响应时间、稳态误差等性能指标参数,以此来检验水雷控制系统的工作性能。
6 HILS仿真结果分析
通过装定器发送的虚拟目标方位信息为(26.5°,26.5°),经过控制系统的半实物仿真,所得的系统HILS弹道曲线如图3所示,弹道数据如表1所示。
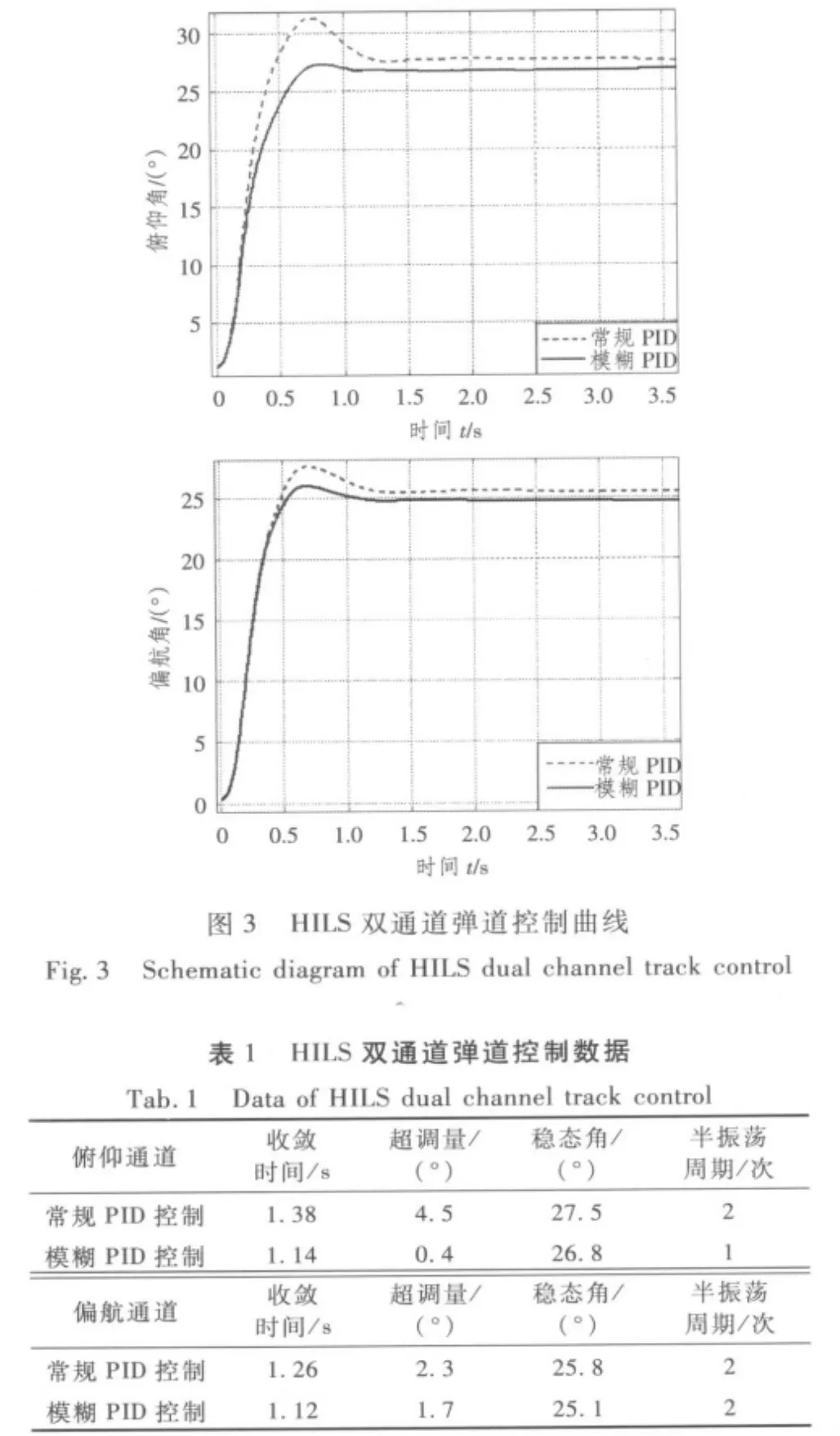
由HILS仿真结果可以看出,通过理论计算的稳态俯仰角和偏航角应为26.5°,在控制系统的作用下,水雷的弹道轨迹超调量≤1.7°,稳态误差≤1.6°,最大超调约≤8%,稳定收敛时间≤1.14 s,半振荡周期≤2。由此可以得出结论,该水雷控制系统很好地实现了航向导引控制,超调较小,收敛时间较快,缺点是稳态误差略大。分析航行控制算法得知,航行控制舵角控制律解算时采取的是PD控制律,缺少积分I环节,因此导致稳态误差较大,后续的改进设计则应该通过在控制律中增加积分环节来有效减小稳态误差。
为了进一步验证水雷控制系统的鲁棒性,选择将仿真流体模型中的敏感参数偏离试验初值20%的情况,进行综合拉偏试验,所得弹道控制曲线如图4所示。

图4 全拉偏双通道弹道控制曲线图Fig.4Full bais schematic diagram of dual channel track control
由半实物仿真系统姿态曲线可以得出结论,该水雷控制系统能较好地满足快速性、稳定性等指标要求,且能在拉偏±20%的状态下完成稳定的航行导引控制,控制能力较强。相信经过不断的控制参数调整和算法优化,控制能力还能得到进一步的提升。
7 结语
从上述HILS仿真结果可以得出结论:半实物仿真可以有效地模拟水雷工作环境和姿态变化,并通过一系列实物检验控制系统的性能,其仿真结果具有较高的置信度,且通过仿真结果可以快速有效地找出系统设计需要改进的地方,大大减少了科研周期和研制经费。可以断定,HILS技术将在水中兵器工程研制中扮演越来越重要的角色。
[1]雷叶红.张记华.张春明.基于dSPACE/MATLA B/ Simulink平台的实时仿真技术研究[J].系统仿真技术,2005,(3):131-135.
LEI Ye-hong,ZHANG Ji-hua,ZHANG Chun-ming.A real-time system simulation platform based on dSPACE/ MATLAB/simulink[J].System Simulation Technology,2005,(3):131-135.
[2]郝睿君.精确制导半实物仿真技术研究[D].南京:南京理工大学.2004.
[3]王茂励.无人水下航行器的运动建模与控制策略研究[D].西安:西北工业大学.2007.
[4]彭荆明.舒旭光.深弹控制仿真系统研究[J].水雷战与舰船防护,2009,(1):35-38.
PENG Jing-ming,SHU Xu-guang.Research on control simulation system of depth charge[J].Mine Warfare&Ship Self-Defence,2009,(1):35-38.
[5]杜亚娟.半实物仿真综合实验台控制系统方案[J].计算机工程,2010,(22):233-235.
DU Ya-juan.Scheme of control system in half-physical simulationcomprehensivetest-bed[J].Computer Engineering,2010,(22):233-235.
[6]杜润乐,王永海.一种导弹控制系统的新型仿真技术研究[J].导弹与航天运载技术,2010,(2):12-17.
DURun-le,WANGYong-hai.Anewsimulation technology for missiles control system[J].Missiles and Space Vehicles,2010,(2):12-17.
猜你喜欢
兵器装备工程学报(2022年7期)2022-08-10
新技术新工艺(2022年3期)2022-04-02
爆炸与冲击(2022年2期)2022-03-17
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
数字海洋与水下攻防(2020年5期)2021-01-04
数字海洋与水下攻防(2020年5期)2021-01-04
数字海洋与水下攻防(2020年5期)2021-01-04
舰船电子工程(2020年4期)2020-06-19
中国水运(2015年2期)2015-04-23
