
基于滑模变结构控制的PMSM建模仿真
2012-02-26 05:40李星宇
兵器装备工程学报 2012年4期
李星宇,汪 沛
(中国人民解放军空军航空大学,长春 130022)
近些年来,随着新型电机控制理论的不断涌现,稀土永磁材料性能的大幅度提高和价格的降低,各种交流永磁同步电动机伺服系统成为交流伺服系统的主流。永磁同步电动机的快速发展,具有效率高、损耗低、体积小等一系列在能源节约和环境保护方面有着重要意义。PMSM结构简单、制造成本低、转矩/惯量比高、气隙密度高、过载能力强,在矢量控制方法下,PMSM的线性转矩电流特性容易实现,所以由PMSM构成的交流伺服系统具有优异的控制性能。但永磁同步电机的数学模型具有多变量、非线性、强耦合的特点,高性能永磁同步电机常采用转子磁场定向的矢量控制、转矩和磁链滞环控制的直接转矩控制等策略来实现解耦,但它们要求系统参数精确可知,在位置闭环控制时常采用PI控制,鲁棒性较差。精确线性化是基于输入输出描述的一种线性化方法,已经成功解决了很多非线性解耦控制问题。滑模变结构控制能够提高系统的鲁棒性,本文基于永磁同步电机的d,q轴的模型,把滑模变结构控制理论引入到永磁同步电机精确线性化控制系统中,建立基于滑模变结构的电流控制器,并对线性化后系统进行仿真和实验验证,达到提高系统鲁棒性的目的。
1 永磁同步电机的数学模型
控制对象的数学模型应当能够准确反应被控系统的静态和动态特性,其准确程度是控制系统动、静态性能好坏的关键。对于永磁同步电机这类强耦合的非线性系统,它的数学模型是分析电机性能,实现力矩和转速控制的理论基础。本文描述了在dp轴系下的永磁同步电机的数学模型,对电机做如下的假设:
1)忽略铁心饱和、涡流和磁滞的影响;
2)磁路线性、可用叠加原理分析;
3)忽略电阻漏感,永磁材料电导率为零;
4)转子上无阻尼绕阻,定子绕组三相对称;
5)定转子绕组产生的气隙磁场正弦分布;
6)忽略磁场的高次谐波;
有如下的方程:
1)磁链方程:

2)电压方程:

3)转矩方程:

4)运动方程:


5)状态方程

可见,PMSM在同步旋转的d、q坐标系中的数学模型比较简单。由转矩方程可知,由于PMSM转子磁链恒定不变,故调节定子交轴电流分量iq或直轴电流分量id就可以有效地调节PMSM的电磁转矩。本文采用id=0的控制方式,这是一种最简单的电流控制方法。电枢反应没有直轴去磁分量,不会产生去磁效应,不会出现永磁电机退磁而使电机性能变坏的现象,能保证电机的电磁转矩和电枢电流成正比。可以将上述公式化简得:

2 PMSM的滑模变结构控制
要实现滑模变结构控制需要解决三个问题,即:① 选择开关面方程s(x)=0;② 确定滑模存在的条件;③ 保证系统的稳定。
滑模量设计:


根据二阶滑模原理,保证滑模量及其一阶导数快速收敛到零点。根据指数趋近率

式中ε>0,q>0。ε为系统克服摄动及外干扰参数,q为趋近速度参数。由(8)和(9)可得滑模变结构的控制率为

为了抑制和消除滑模控制过程中的抖振,常采用“边界层”法。“边界层”法实际上是准滑模变结构控制方法的一种,采用饱和函数sat(s,δ),句代替控制率中的符号函数sign(s),其中

由于饱和函数sat(s)的存在,在“边界层”内不要求在滑动模态上进行变结构的切换,使得控制作用在边界层内部变为连续控制,从而消除了滑模面的抖振现象。但是,边界层的厚度,对滑模变结构控制系统的鲁棒性和稳态性能有很大的影响。一般来说,边界层厚度越小,控制效果越好,但同时会使抖振增强;边界层厚度越大,抖振越小,但会带来系统稳态误差,并降低系统的鲁棒性因此,可根据系统状态来自适应的调节边界层的厚度,以获得较优的控制效果。
可以推出


3 基于MATLAB-Simulink仿真
仿真框图见图1。实验PMSM参数见表1。
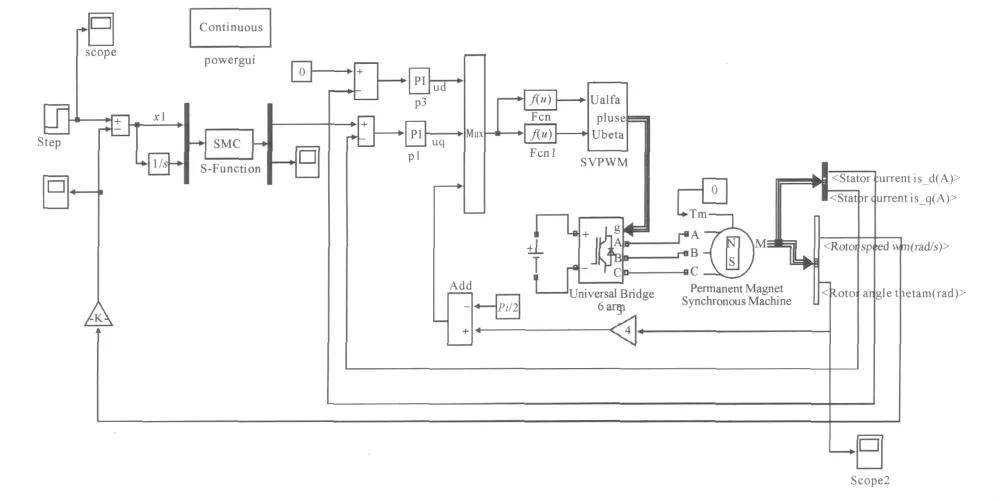
图1 Simulink仿真框图

表1 仿真实验采用的PMSM参数
图2~4是给定机械角速度为100在0.01 s时刻发生的阶跃信号,从图中可以看出反馈机械角速度在0.03 s时达到稳定,滑膜控制的响应时间在0.02 s左右,可以提供良好的时实性。

图5~7是给定信号为10周期为200的正弦曲线,通过仿真图可以看出系统是稳定工作的可以很好的进行控制,其中滑膜控制的抖振在0.4以内,在规定的要求以内,可以得到比较满意的控制结果。

4 结束语
针对PMSM伺服系统的特点,采用滑模变结构控制控制策略。采用趋近率设计的二阶滑模速度、电流控制器能够高精度快速跟踪给定信号,较好抑制非周期性干扰;仿真结果表明对非周期性和周期性扰动实现了同时抑制,保证了系统的跟踪精度,而且具有较强的鲁棒性和较快的响应速度。
[1] 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
[2] 黄雷,赵光宙,贺益康.PMSM的自适应滑模观测器无传感器控制[J].浙江大学学报:工学版,2007,41(7):1107-1110.
[3] 盖廓,万健如,许镇琳,等.高性能永磁同步电机位置伺服系统建模与仿真[J].计算机仿真,2007,24(5):311-315.
[4] 李培江,尤婷.永磁同步电机控制系统的仿真研究[J].计算机仿真,2011(6):255-259.
(责任编辑周江川)
猜你喜欢
建材发展导向(2022年18期)2022-09-22
防爆电机(2022年4期)2022-08-17
湘潭大学自然科学学报(2022年2期)2022-07-28
北京航空航天大学学报(2022年6期)2022-07-02
防爆电机(2022年3期)2022-06-17
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
空间科学学报(2020年3期)2020-07-24
航空发动机(2020年3期)2020-07-24
空间科学学报(2020年4期)2020-04-22

- 兵器装备工程学报的其它文章
- 小波神经网络研究
- 海洋温度条件下的固体推进剂应力应变分析