白噪声路谱的生成和汽车平顺性仿真
2012-02-01 03:07金爽,刘浩,张鹏
科技传播 2012年13期
金 爽,刘 浩,张 鹏
长安大学汽车学院,陕西西安 710018
现代汽车中,平顺性、操纵稳定性等关乎汽车舒适性、操纵性的性能指标越来越受到人们的重视,汽车平顺性的控制目标就是将汽车在行驶过程中产生的振动和冲击强度控制在一定界限之内,他已成为现代高速汽车的主要性能指标之一[1]。本文着重讨论基于新国标GB/T4970-2009的汽车平顺性仿真。
1 路面不平度生成方法综述
路面不平度作为汽车的激励,受到各国专家的关注,1984年国际标准化组织在文件中提出的“路面不平度表示方法草案”建议以路面功率谱密度Gq(n)用1-1式作为拟合表达式:

式中,n为空间频率,n0为参考空间频率,Gq(n0)为参考空间频率n0下的路面功率谱密度值。
使用离散时间随机序列描述随机路面不平度时,一般利用有理函数形式:

其中,αβ与随机路面等级有关[2]。
路面不平度的生成方法多种多样,大都利用计算机软件和相关程序进行仿真,下面我们着重讨论基于白噪声路谱和汽车平顺性的仿真。
2 基于白噪声路谱仿真的参数设置与模型建立
在进行汽车平顺性仿真前,我们必须选择路面对车辆的激励。我团队在比较几种常用的路谱生成方法后,决定采用滤波白噪声来生成路谱。即:

其中,q(t)为路面位移,按照GB/T4970-2009(最新国标),考虑到试验用车M类车辆,路面为沥青路,Gq(n0)为路面不平度,(C级路面)。u为车速u=40,50,60,70km/h 即u=11.11,13.89,16.67,19.44m/ s,W(t)为均值为零的高斯白噪声,白噪声的参数设置是在parameter中予以设置。f0是下截止频,f0=0.1Hz
很多文献中关于系数的计算都予以省略了,下面我们对上面的系数进行计算。
Gq( n0)、u都影响了高斯白噪声的增益W(t),系数为

所以在仿真中各个模块的parameter分别为图1 Simulink仿真图样,图2 汽车所受地面激励输入的仿真信号。
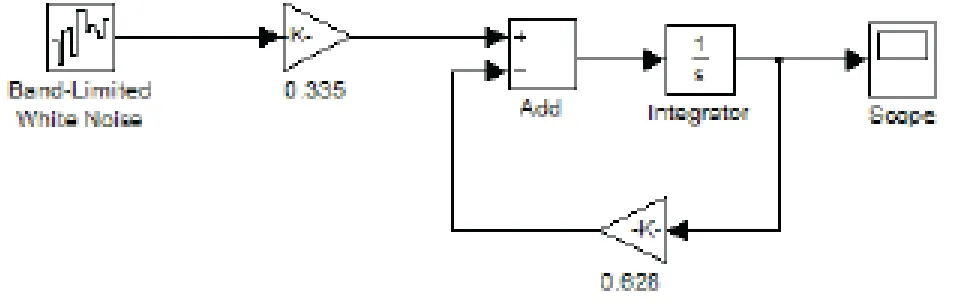
图1 Simulink仿真图样
在对白噪声参数设置里,Noise power设置为0.1,表示其能量大小,采样时间一般设置为0.1,白噪声的增益由式2-1有,在路面位移系数中的,这样我们就得到了汽车所受地面激励输入的仿真信号,见图2 汽车所受地面激励输入的仿真信号。

图2 汽车所受地面激励输入的仿真信号
3 汽车平顺性仿真与展望
路面不平度的传递路线为:路面→车轮→悬架系统→人体,当采用车身与车轮两个自由度振动系统作为平顺性仿真中车辆振动模型时,必须确定悬挂质量,非悬挂质量,弹簧刚度,减振器阻尼系数,轮胎刚度,然后建立运动方程,确定各项系数,随后就可以在SIMULINK仿真环境下分析车轮、悬架系统或者人体的振动强度。
汽车平顺性仿真是利用计算机软件进行汽车平顺性评价的一种方法,与传统的实验测量相比,耗费的财力、物力少之又少,所以优化仿真方法,建立合适的路谱和复杂自由度的振动模型将是未来汽车平顺性仿真的重点。
[1]关振东.轿车平顺性仿真与实验研究[D].吉林大学,2007,6.
[2]王永涛.车辆悬架优化控制与汽车平顺性分析[D].郑州大学,2010,5.
猜你喜欢
农业知识(2021年19期)2021-10-16
上海交通大学学报(2020年4期)2020-05-07
青岛画报(2017年12期)2018-02-06
商周刊(2017年22期)2017-11-09
中国中医眼科杂志(2016年6期)2016-04-08
科技与创新(2015年23期)2015-12-08
江西通信科技(2015年3期)2015-12-05
山西大同大学学报(自然科学版)(2014年6期)2014-01-23
上海金属(2013年4期)2013-12-20
天津医药(2010年7期)2010-07-16