
基于无线的数字式船舶视频监控系统
2012-01-31 05:22:06于謇
电视技术 2012年13期
于 謇
(中国舰船研究设计中心,湖北武汉430064)
视频监控系统是船舶系统中不可或缺的子系统,是直接获取船舶甲板面视觉信息和处理突发事件的重要手段。随着电子技术的不断发展,数字化、集成化、无线化[1]是今后民用船舶视频监控系统的发展趋势。
当下市场上的民用船舶视频监控系统是基于图像系统的应用,即前端摄像头采集的模拟信号,通过同轴电缆传输至网络视频编码器,由网络视频编码器对视频图像进行数字化编码及存储,通过网络视频编码器的VGA接口将视频图像在显示器上进行显示。或者由控制解码终端通过网络访问网络视频解码器,获取数字视频流,通过内部解码芯片将数字化的视频信号进行解码输出显示。
然而,传统的视频监控系统是基于有线方式进行传输,系统集成度不高,设备拉线繁杂影响美观。基于无线的数字式船舶视频监控系统可有效避免复杂布线的问题,实现摄像前端编码,数据传输无绳化,便于网络内监控节点的增减和维护,适应现代电子技术的发展,也适用于民船应用。
TMS320DM6446是TI公司推出的基于第三代VLIW的面向数字多媒体应用且支持Davinci技术的双核SoC。本文围绕这款包含ARM926EJ-S核和TMS320C64x+核的高性能片上系统设计了一个无线数字式船舶视频监控系统。
1 系统组成与设计原理
整个系统分为摄像机前端模块和监控中心视频服务器两部分。摄像机前端模块具有智能化的摄像头,并将采集到的视频信号进行编码压缩[2],转换为视频流后,通过无线的方式发送到监控中心接收端。监控中心视频服务器可通过无线网络对授权的摄像前端进行开关、录像、云台姿态和镜头的变焦等控制,并可选择需要采集的图像进行显示。
摄像机前端由电源模块、视频采集转换模块、主控模块、无线传输模块组成。监控中心由视频服务器、无线传输模块、控制键盘和轨迹球组成,并通过解码软件来实现对视频流的还原和在显示器上显示[3]。系统整体设计方案如图1所示。

图1 视频监控系统框图
2 系统硬件设计
2.1 TMS320DM6446片上系统
TMS320DM6446是一种高性能双核芯片,外部供电电压为5 V,并可分压至1.2 V,1.8 V,3.3 V的工作电压。其内含ARM926EJ-S核的ARM处理器、TMS320C64x+核的DSP子系统、视频处理子系统VPSS和图像协处理器VICP。其中,DSP子系统工作最高频率为594 MHz,最大处理能力可达4 800 MI/s(兆指令/秒),并包含了64个32位通用寄存器、2个乘法器、6个算术逻辑单元,此外,还集成了32 kbyte的L1P编程RAM、80 kbyte的L1D数据RAM和64 kbyte的L2统一映射RAM。ARM子系统为32位RISC处理器,包含32位和16位ARM指令集,并集成了16 kbyte指令缓存、8 kbyte缓存。ARM子系统主要负责系统的整体配置、模块功能控制和调用视频算法。而DSP子系统负责视频算法的执行。
片上系统TMS320DM6446为361脚BGA封装,其外设十分丰富,包含全速USB2.0端口、71个通用I/O输入输出端口、64通道DMA控制器、3个UARTS、SPI、音频串口和3个64位通用定时器。另TMS320DM6446片上系统还集成了可接256 kbyte 32位DDR2型SDRAM的DDR2控制器和可扩展128 kbyte 16位Flash的异步外部存储器接口EMIF。
2.2 无线传输模块
无线传输模块采用EVDO数传模块,完成拨号即可通过3G组建工作网络。EVDO数传模块收到发送指令,则检测主控模块的数据发送区,得到确认后将采集得到的视频信号用3G网络发送出去。
EVDO是美国主导的基于码分多址的,针对分组数据业务进行优化的、高频谱利用率的CDMA无线通信技术。其频谱利用率高、保密性好、容量大、覆盖范围广。
EVDORev.A是单载波系统,上行速率为1.8 Mbit/s,下行速率为3.1 Mbit/s。可在1.25 MHz带宽内提供峰值速率达2.4 Mbit/s的高速数据传输服务,这一速率甚至高于WCDMA的5 MHz带宽内所能提供的数据速率。其支持带宽可达20 MHz,能保证至少5个用户终端同时进行视频传输的信号质量(QoS)。
EVDORev.A对接入信道和控制信道均进行了优化:在接入信道上可以支持更高的传输速率和更短的接入前缀,使用户可以在发起服务请求时更快地接入网络;在控制信道上可以支持更短的寻呼周期,使用户可以较快地响应来自网络的服务请求。EVDORev.A高层协议中引入了三级寻呼周期机制,使终端可以适配网络服务情况的同时降低功耗,提高待机时间。此外,CDMA2000 1xEV-DO采用增强的无线链路协议RLP,与TCP协议共同减少误帧率,其强大的空中链路鉴权与加密算法保证了数据传输的安全性。
无线传输模块接口电路如图2所示。

图2 无线传输模块接口电路
2.3 视频采集转换模块
视频采集转换芯片采用TI公司推出的可实现优异图像质量的新型TVP5158多通道NTSC/PAL视频解码器。该芯片内核电压为1.8 V,输入输出电压为3.3 V,采用外部独立的14.318 Hz的晶振为其提供时钟频率。TVP5158可同时解码4个通道的视频输入,输入的模拟视频信号通过TVP5158视频解码芯片转换成10位YUV 4∶2∶2的格式,经过YUV分离电路,在YUV到YCrCb的转换电路中转换成8位的ITU-RBT.656格式的视频数据。
由于TVP5158的视频输出与基于达芬奇技术的TI数字媒体处理器具有无缝接口,其连接可不借助于FPGA,从而降低系统成本。TVP5158的输出连接至DM6446的视频输入接口,TMS320DM6446通过I2C总线对TVP5158的模拟信号输入口选择、视频流输出格式选择等工作状态和参数进行确定。然后,TMS320DM6446通过EDMA通道将存入FIFO的视频流数据分配至存储器进行数据处理,视频采集转换模块接口电路如图3所示。

图3 视频采集转换接口电路
2.4 总体硬件电路
整个摄像前端电路由摄像头、云台控制器、数据转换模块、处理模块、无线数传模块和外围电路组成。摄像头采集的视频数据经过数据转换模块输入到处理模块中,处理模块对数据进行存储。在收到发送指令后,处理模块通过USB接口利用无线数传模块进行数据传输。
此外,处理模块除了基本的外围电路外,还专门设计了一个更改节点ID按键电路,它用于在节点出现故障或临时加入时更正或修改节点的ID。总体硬件电路如图4所示。
3 系统软件设计
3.1 摄像前端软件设计

图4 摄像前端硬件电路
摄像前端不间断地采集视频信号,当摄像前端收到监控中心的发送读取命令后,将压缩编码后的图像数据写入存储器中,每次写完便发出中断信号通知处理器。处理器响应中断信号,从存储器中读取数据并做相应处理后通过USB控制器将数据通过EVDO无线传输模块发送,摄像前端视频数据采集发送流程如图5所示。

图5 视频数据采集发送流程
ID更改按键电路的设计是为了方便系统分辨、维修、增加摄像前端,采取中断的手段实现。设置外部中断低电平有效,长按按键后(按住时间大于2 s),进入中断流程,短按一下计数器加1,从而达到网络ID号的修改。更改网络ID流程如图6所示。
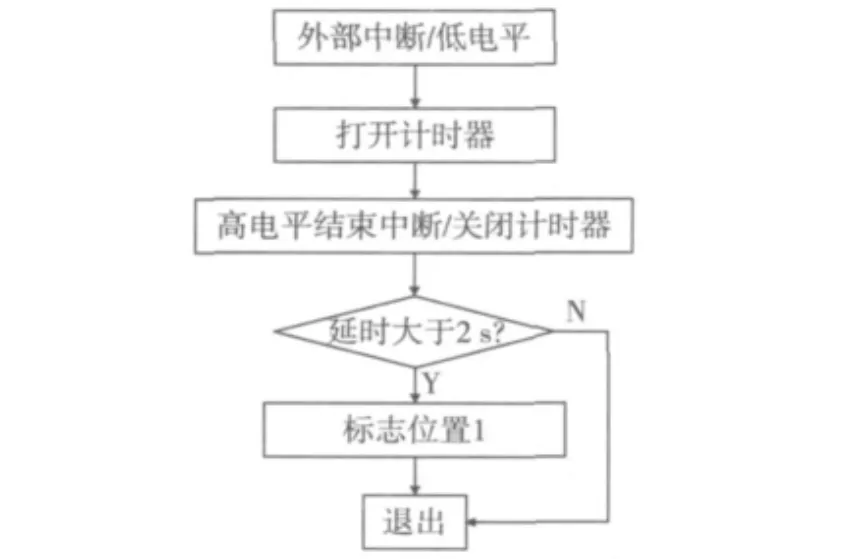
图6 网络ID修改流程
3.2 监控中心软件设计
监控中心在确认所有接入网络的摄像前端后,开始读取阶段:监控中心向指定前端发送读取命令,如果没有得到回复,则延时70 ms再发送一次读取命令,反复3次后仍没有回复,则认定通信失败或没有该前端,转向其他摄像前端;如果得到回复,则记录下所收到的数据进行存储、解码,并传送至显示终端进行图像展示。整个数据处理流程如图7所示。

图7 数据处理流程
4 结束语
本系统充分融合高性能双核SoC和EVDO无线传输技术,设计出了基于无线的船舶视频监控系统,为解决工程难题提供了一定的思路。
无线的船舶视频监控系统有效地解决了系统布线的难题,便于整个视频监视网络节点的增加、删除、修复。同时,主机硬件采用嵌入式技术路线,可有效实现设备小型化,有利于总体布置。经实际测试,本系统可直接应用于民用船舶视频监视系统应用,实现摄像前端布线难点部位数据传输无绳化,适应现代电子技术的发展,使用效益良好。
[1]卢秋波.视频监控业务及技术发展趋势[J].电信技术,2009,10(23):23-26.
[2]张溢华,万晓榆,樊自甫.3G视频监控系统传输部分的设计[J].电视技术,2009,33(2):61-62.
[3]刘富强.数字视频监控系统开发及应用[M].北京:机械工业出版社,2003.
猜你喜欢
中国石油石化(2022年12期)2022-07-16 08:28:28
船舶(2021年4期)2021-09-07 17:32:22
无线互联科技(2021年4期)2021-04-21 10:12:36
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
中国外汇(2019年19期)2019-11-26 00:57:32
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
小猕猴智力画刊(2019年3期)2019-04-19 00:01:52
家庭影院技术(2018年11期)2019-01-21 02:20:50
家庭影院技术(2018年11期)2019-01-21 02:20:48
电子制作(2018年23期)2018-12-26 01:01:08
