
玻璃钢技术在变电站巡检机器人中的应用研究
2012-01-25 07:52:40王明瑞孙大庆
制造业自动化 2012年12期
曹 涛,王明瑞,孙大庆,杨 墨,王 飞
(山东电力研究院 国家电网电力机器人重点实验室,济南 250000)
0 引言
变电站巡检机器人系统以全自主控制方式,在无人值守变电站对室外高压设备进行巡视[1]。通过携带的可见光摄像机、远程红外热成像摄像机、高性能定向传感器,完成变电站设备的远程红外检测、远程图像监控、声音检测、移动物体闯入侦测等[2],并记录相关信息,提供异常报警。操作人员只需通过后台基站计算机收到的实时数据、图像等信息,即可完成变电站设备的巡检工作。同时,经过现场运行表明,巡检机器人系统的非接触式移动检测与变电站综合自动化的接触式监控结合,可以真正形成全监控方式,大大提高变电站设备运行的安全可靠性[3]。
采用变电站巡检机器人又一优势,可以降低变电站环境中的恶劣气候[4]、噪声污染[5]、电磁辐射[6]等对巡检工作人员造成的伤害。变电站智能巡检机器人是代替巡检人员对变电站设备进行巡查,减少了变电站环境对工作人员的影响。同时变电站巡检机器人自身的防护也成为重点研发工作,通过针对巡检机器人虚拟样机研究分析[7],选取成本低,性能优越的外壳材料,对巡检机器人的研发工作和发展方向有着重要的意义。
1 玻璃钢材料的应用概况
1.1 玻璃钢材料概述
玻璃钢材料又称作FRP,即纤维强化塑料,通常指用玻璃纤维增强不饱和聚脂、环氧树脂与酚醛树脂基体。以玻璃纤维或其制品用作增强材料的增强塑料,称谓为玻璃纤维增强塑料,即所谓的玻璃钢[8]。玻璃钢材料是20世纪材料科学领域迅速发展的一类新材料,因其独特性能优势,近年来得到了广泛的发展和应用[9]。已经在航空航天、铁道铁路、装饰建筑、家居家具、广告展示、工艺礼品、建材卫浴、游艇泊船、体育用材、环卫工程等相关十多个行业中有着广泛应用,并深受赞誉,成为材料行业中新时代商家的需求首选。
玻璃钢复合材料已与金属、高聚物、陶瓷并列为四大材料。其发展速度和规模、应用范围、对现代科学技术及生产进步的影响和推动,以及其自身的科学研究深度和广度等诸多方面来看,现代复合材料领域中所取得的成就,都超过人类历史上曾使用过的任何材料。以至于一个国家、地区的复合材料水平,都成为衡量其科学与经济发展的标志之一[10]。
1.2 玻璃钢材料特性[11]
玻璃钢的基本性能主要取决于其两大组分和它们之间的结合,即玻璃纤维和合成树脂间的结合。玻璃钢集中了玻璃纤维同合成树脂的特性,具有质量轻、强度高、耐化学腐蚀[12]、电绝缘性好,透过电磁波、隔音、减震和耐瞬时高温烧蚀等特点。因此,玻璃钢已成为国民经济建设中不可缺少的重要材料之一。
1)玻璃钢材料的各向异性
玻璃钢材料是一种各向异性材料,它是由玻璃纤维以及树脂结合而成。玻璃纤维作为承担载荷的主要材料,树脂基体作为粘结材料,同时将玻璃纤维粘合固定,并给以保护。在应力作用下树脂基体可产生塑性移动进而将负荷传递到玻璃纤维上去。玻璃纤维的强度与弹性模量远高于树脂,其他性能也有显著区别。如表1所示。
表1 玻璃纤维与聚酯树脂性能对比
因此,由于玻璃纤维承受的主要是由经向拉伸负荷,同时在纤维垂直方向上基本上不能承受负荷,因而,玻璃钢的整体强度随着玻璃纤维的布向而异。因此,这种材料的整体强度也就具有良好的可设计性[13],可以按相应的分布和大小来合理安排玻璃纤维的数量、分布和方向,使材料发挥其最佳的作用[14]。
2)玻璃钢的物理性能[15]
玻璃钢具有密度小,良好的介电绝缘性能、隔热性能、抗吸水和抗热膨胀性能等。玻璃钢密度介于2.5~2.0之间,只有普通炭的1/4~1/5比轻金属铝还要轻1/3左右,却具有较高的机械强度,某些方面甚至能接近普通碳钢的水平。按强度计算,玻璃钢不仅能超过普通碳钢,而且可达到和超过某些特殊合金钢的水平。玻璃钢有优良的电绝缘性能,在高频作用下仍然能保持良好的介电性能。在任绝缘材料中,用玻璃纤维布代替纸及棉布,可提高绝缘材料的绝缘等级,在用相同树脂的情况下,至少可以提高一个等级。 玻璃钢有良好的耐热性能,它具有较大的比热,是金属的2~3倍。导热系数却比较低,只是金属材料的1/00~1/1000。
2 结构设计中应注意的问题[16]
2.1 应力集中[17]问题
根据玻璃纤维材料的拉伸试验[18]的结果,我们可以得出玻璃钢材料直到破坏都没有明显的屈服点,这说明玻璃钢具有小小的塑性,并没有金属的缓和应力作用,所以它在部件连接处附近的应力集中现象较为严重。
玻璃钢部件有两种方法连接,即机械连接[19]和胶接连接[20]。机械连接,主要在设备安装、部件安装等局部地方使用,其特点是装拆方便,容易检查,但是减少了受力面积,产生的应力较为集中,降低了接点疲劳强度。胶接连接主要应用在结构件与本体间连接(如风扇结构、接口面板结构、安装接触面等),设计过程中考虑如何提高接缝连接的强度,使其达到整体结构的强度,避免出现应力集中现象。
2.2 弹性模量[21]低
玻璃钢主要分为热固性玻璃钢和热塑性玻璃钢两类:
热固性玻璃钢是指以玻璃纤维为增强材料和以热固性树脂为基体构成的复合材料。这种材料具有生产工艺简单、强度高、密度低、耐腐蚀、介电性高等特点,与热塑性玻璃钢相比,具有较高的耐热性。这种玻璃钢的主要缺点就是弹性模量低,刚性偏差。
热塑性玻璃钢是以玻璃纤维为增强材料和以热塑性树脂为基体构成的复合材料。热塑性玻璃钢与热固性玻璃钢相比,强度和疲劳性能均可提高2~3倍以上,冲击韧度也可提高2~4倍,抗蠕变能力也有相应提高。同时针对结构设计时需要考虑外壳承重,防止其受力形变,可以通过整体成型、增加剖面模数、增加加强筋和夹层结构等方法弥补刚性低的缺点。
2.3 材料性能[22]的不稳定性
一般材料如:陶瓷材料、高分子材料等等。它们是根据材料的物质成分来分类和定义的。但是,玻璃钢作为一种复合材料,定义是由两种或两种以上的物质,以物理结合的方式(同时自保持其原有属性)组成的物质,显然,复合材料没有什么材料物质成分概念。因此,影响结构设计的一个重要因素就是玻璃钢力学性能的不稳定性。
3 玻璃钢材料在巡检机器人中的应用
3.1 玻璃钢材料应用
由于变电站巡检机器人的研发,处于小批量生产过程,与注塑相对比,玻璃钢材料的应用更适合现巡检机器人产品的生产。而巡检机器人外壳上承载部分设备,结构复杂,如图1所示,使整体无法由玻璃钢整体加工而成。

图1 变电站巡检机器人外形示意图
以外壳主体为例,玻璃钢模型加工,需要采用特殊工艺处理。即整体结构、大面积平面、大曲面采用玻璃钢模型加工,玻璃钢模具无法加工的小曲面、复杂结构(左侧风扇通风结构、右侧风扇通风结构、充电门整体机构、拾音器安装部分整体结构、指示灯安装部分整体结构等)采用其他加工方式,在通过机械连接或胶接连接方式固定到玻璃钢模型主体上,然后在经过表面处理,内部增加屏蔽层[23]等处理,最终完成玻璃钢材料的外壳主体加工。
图2 玻璃钢主体加工模型示意图
3.2 基于巡检防护外壳对玻璃钢材料分析
机器人壳体样机模型建立主要使用三维软件UG、PROE等对各部分零件图进行三维模型创建。由于机器人本体壳体结构较为复杂,又同各零件之间有准确的配合和定位,因此这个模型建立是一个复杂而繁琐的过程。
通过三维数据模型,最后将各个零件组成预先规划好的装配体中,按照实际的装配过程明确各个零件间的配合关系,生成一个装配关系明确的三维数据模型,通过数据格式转换,可在有限元分析软件中使用。
在有限元分析过程中,首先根据选取确定壳体的属性,定义壳体材料的属性,将壳体与分析软件数据库相连接,分析软件依据定义在零件间的约束状态、附加在零件上的载荷,自动为壳体进行网格划分,同时设计者也可以根据实际需求,针对壳体局部网格进行细化。划分网格之后即可运行分析,经过软件计算分析,得到分析结果。
分析软件可以提供一个可视化的分析界面,将应力、应变、位移、变形等设计检查项目用图像、图表、动画方式表达。通过对壳体每个接触面的受力分析,可以判断出壳体的受力情况和材料的应用是否正确。
以侧面安装孔为例,材料选取如表格2所示。

表2 玻璃钢材料属性表
安装时,固定安装孔所受到一定拉力,可以转化为固定安装孔不动,而壳体受到一定拉力,设定极限瞬时拉力为400N时通过软件分析,得出了一系列相应的应力、应变、位移图,如图4~图6所示。
由图4得出单最大应力远小于玻璃钢的屈服极限;图5得出z向的最大变形位移为0.262536 mm,说明在载荷400N的作用下,玻璃钢材料是足够安全的。
已安装定位孔为例,针对玻璃钢材料外壳做有限元分析,玻璃钢材料的强度完全复合巡检机器人防护外壳功能的需求。
4 结论
这几年,玻璃钢复合材料已经在我国有着突飞猛进的发展,生产工艺日渐成熟。将玻璃钢材料应用于变电站巡检机器人产品研发中,在降低生产成本的同时,也大大缩短了产品的生产周期。在产品研发、样品试制过程中也为企业的决策者提供了更多的选择空间。
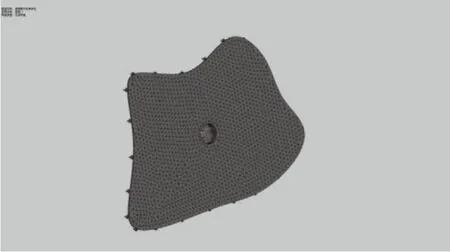
图3 算例-网格
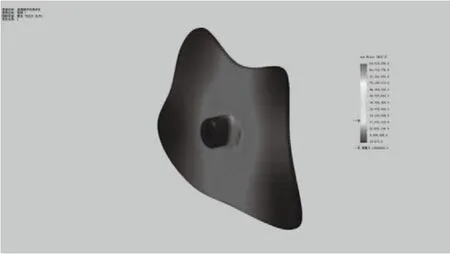
图4 算例-应力
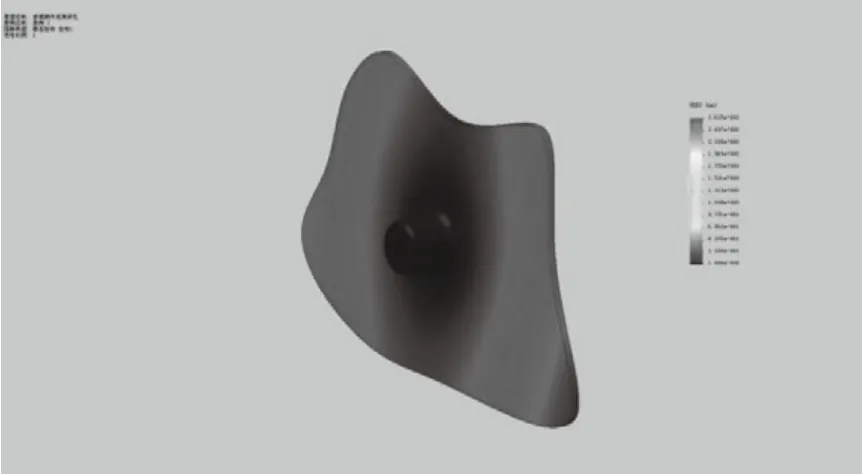
图5 算例-位移
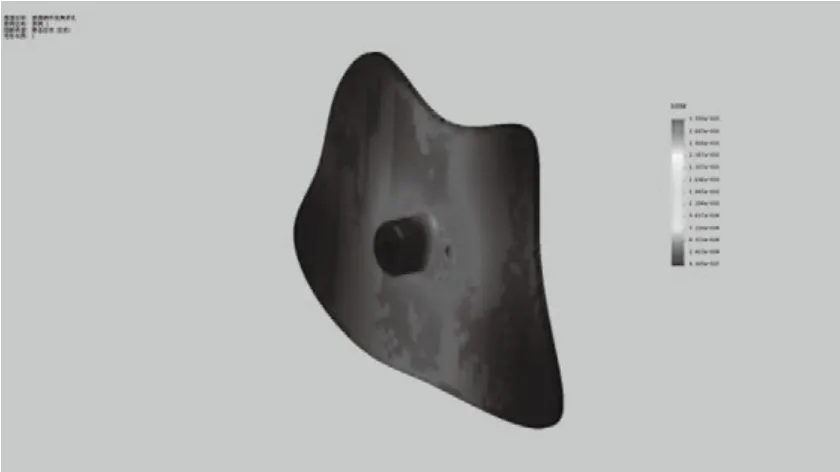
图6 算例-应变

表3 力学分析结果
[1]孙国凯,韩刚.变电站巡检方式对比及智能巡检机器人[J].农村电气化,2008, 04.
[2]鲁守银,苏建军.机器人在变电站设备巡检中的应用[J].机器人技术与应用,2007, 05.
[3]鲁守银,钱庆林,张斌,王明瑞.变电站设备巡检机器人的研制[J].电力系统自动化,2006,13.
[4]张志新.城市气候的特征及危害[J].农业与技术,2003,03.
[5]叶建斌,陈雁.变电站环境噪声现场测试分析讨论[J].广东电力,2005,10.
[6]周粉妹.电磁辐射对人体的影响[J].南通职业大学学报,2000,01.
[7]曹涛,栾贻青,肖鹏.变电站巡检机器人虚拟样机系统开发及其研究 [J].机械工程师,2011,07.
[8]韩玮,陈南梁.玻璃钢发展综述及经编织物作为玻璃钢增强基布的发展前景[J].国际纺织导报,2000,04.
[9]王秋霞.世界复合材料强国与我国的复合材料现状及发展动向[J].玻璃钢复合材料,1999,01.
[10]陈南梁.地组织结构及材料对多轴向经编增强复合材料拉伸性能的影响[J].东南大学学报,2002,01.
[11]张信田.纯聚氯乙烯泡沫塑料夹层结构在玻璃钢造船中的应用(下)[J].纤维复合材料,1999,01.
[12]胡钜才.玻璃钢腐蚀特性评价试验[J].玻璃钢/复合材料,1987,06.
[13]何宇声.玻璃钢的特性和应用[J].中国建材,1984年03期.
[14]沈开猷.玻璃钢结构设计[J].玻璃钢复合材料,1989,05.
[15]周祝林.无机复合材料(玻璃钢)性能[J].上海建材,2008,04.
[16]邱建新.玻璃钢材料在船舶结构设计中应注意的问题[J].中国水运(理论版),2007, 01.
[17]陈古耀.谈冶金设备应力集中的危害和预防[J].轧钢,1994,02.
[18]谭金彪.玻璃/纤维环氧复合材料静态拉伸试验[J].萍乡高等专科学校学报,2011,03.
[19]胡宝刚.复合材料结构件的机械连接工艺[J].导弹与航天运载技术,1995,06.
[20]沃西源.复合材料胶接连接工艺 [J].航天返回与遥感,1996,01.
[21]冯广占,柏学遂,韩最顺,余茂益.玻璃钢力学性能的测试及分析 [J].玻璃钢/复合材料,1984,06.
[22]李湘渝,李峰,秦岭,王林.玻璃钢结构的力学性能实验[J].江苏科技大学学报(自然科学版),2011,01.
[23]杨帆,姚德贵,彭卉,何为.高压变电站工频电磁场屏蔽效能测试及分析[J].高压电器,2010,01.
猜你喜欢
减速顶与调速技术(2022年3期)2022-02-11 11:26:36
煤气与热力(2021年3期)2021-06-09 06:16:18
中国酿造(2019年9期)2019-10-08 05:44:04
制造技术与机床(2019年4期)2019-04-04 12:22:10
纤维复合材料(2018年3期)2018-04-25 07:22:58
电子测试(2017年11期)2017-12-15 08:57:13
广东技术师范大学学报(2016年5期)2016-08-22 09:07:26
设备管理与维修(2016年7期)2016-04-23 06:51:56
焊接(2016年2期)2016-02-27 13:01:22
应用化工(2014年10期)2014-08-16 13:11:29
