
机载激光对管道自主定位误差的灵敏性分析
2012-01-22 08:17刘海芳钟诗胜刘克强
中国石油大学学报(自然科学版) 2012年2期
刘海芳,王 瑞,钟诗胜,刘克强
(1.哈尔滨工业大学 机电工程学院,黑龙江哈尔滨 150001;2.哈尔滨工业大学(威海)船舶学院,山东 威海 264209)
机载激光对管道自主定位误差的灵敏性分析
刘海芳1,2,王 瑞2,钟诗胜1,刘克强2
(1.哈尔滨工业大学 机电工程学院,黑龙江哈尔滨 150001;2.哈尔滨工业大学(威海)船舶学院,山东 威海 264209)
针对机载激光对埋地天然气管道自主定位这一特殊应用背景,对其定位原理进行研究,阐述其实现方法,分析激光对管道定位精度影响的因素,介绍定位误差建模方法。以载机位姿误差为例,给出定位误差敏感误差源的辨识方法和步骤。结果表明:载机的位姿精度是影响定位精度的主要因素,俯仰角误差对地面点误差影响最大,滚转角误差对地面点误差的影响较小,地面点的定位误差几乎不受载机高度误差的影响。分析结果提高了定位误差避免和误差补偿的效率。
机载激光;埋地管道;自主定位;定位误差;误差分析
随着西气东输、川气东送以及从俄罗斯等国引进天然气项目的实施,我国的天然气管道已达上万公里,管道泄漏对天然气管道的平稳运营造成重大的安全隐患,因此快速而准确地探测出管道泄漏对减少人员伤亡和财产损失有重大意义。针对传统的长距离、高压力、大管径天然气输送管道泄漏监测方法效率低、定位精度不高、易误报的缺点,提出利用直升机搭载泄漏检测装置进行空中遥感检测。Berezin等[1-2]报道国外天然气公司已经采用机载遥感泄漏检测装置对长输天然气管线进行泄漏检测,但主要介绍泄漏检测仪的工作原理,对机载环境下泄漏检测装置如何自主对管道进行准确定位则未见任何报道。陈东等[3-4]对于长输天然气管道进行遥感泄漏检测的光学检测方法机制也进行了研究。笔者利用中科院安徽光机所提供的基于可调谐二极管激光吸收光谱(TDLAS)技术的管道泄漏激光检测仪研究将其搭载在直升机上对埋地天然气管道进行泄漏检测,概述机载激光对管道自主定位的机制,分析影响定位精度的因素,为机载激光对管道自主定位误差的避免与补偿提供依据。
1 检测激光对埋地管道自主定位原理
1.1 检测激光对管道自主定位点的确定
由文献[5]可知,检测激光对管道的定位点T(xt,yt,zt)是根据检测激光对管道的最小距离来确定的,如图1所示。其中P(x0,y0,z0)为载机位置,A(x1,y1,z1)和 B(x2,y2,z2)为待检测管段的两个已知端点。
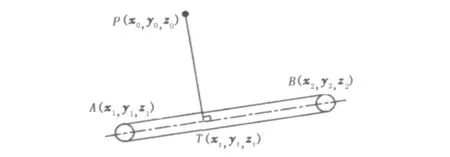
图1 管道上激光扫描点求解图Fig.1 Solving figure of laser scanning point on pipeline
点T的位置可用解析几何中的点法式求解,具体过程如下:
(1)过P点,以AB为法向量的平面方程为

(2)构建直线AB所代表的管线方程为

将式(1)和(2)联立,得到激光束在管道上的定位点T的位置为

其中

据此,根据实时测得的载机位置P(x0,y0,z0)获得已知检测管道上激光的扫描点T点的空间位置(xt,yt,zt),即载机的位置和管道上的扫描点是一一对应的,对应每一扫描点可获得一甲烷的浓度信息Hi,即获得了地面的一体化信息(xti,yti,zti,Hi)。一旦检测出泄漏,泄漏点对应的位置就可得到,便于作出快速反应。
1.2 定位点的实现
由图1可知,矢量PT是要调整的激光束的方向。为实现激光对管道的对准,必须求出激光束指向PT相对于载机坐标系的方位角和俯仰角,然后由机构驱动激光器转过相应角度实现对管道的对准。但GPS所测得的载机位置是相对于WGS-84坐标系下的位置,而姿态测量设备测得的载机姿态是相对于地理坐标系,因此要求出激光束在载机坐标系下的方位角和俯仰角,必须进行各坐标系之间的转换。
1.2.1 坐标系的定义
根据各传感器使用的基准不同建立如下坐标系[5]:
(a)WGS-84坐标系(e)o-xyz;
(b)东北天坐标系(n)o'-x'y'z';
(c)载体坐标系(b)。
各坐标系的定义见文献[5]。
1.2.2 坐标转换
激光束指向PT相对于载机坐标系的方位角和俯仰角可通过文献[6]、[7]中的坐标转换过程实现。
1.2.3 激光束角度的计算
设m表示激光束PT在载体坐标系下x方向的向量,n表示y方向的向量,k表示z方向的向量,

激光束指向方位角α和俯仰角β分别为[5]

方位角α逆时针为正,顺时针为负;俯仰角β向下为正,向上为负。在程序中设定:当载机刚好处于待检测管道点正上方即当α为任意角度时,方位电机不动,俯仰电机转过相应角度即可。
2 激光对管道自主定位的精度分析
2.1 影响定位精度的因素
由机载激光对管道自主定位原理的分析可知,最终激光束在地面的位置是由GPS测得的载机位置数据、姿态测量设备测得的载机姿态信息、机构的执行误差以及机载环境中干扰力矩引起的跟踪误差和载体运动的影响共同决定的。激光束在地面的定位点有误差,使得检测位置(xti,yti,zti)和甲烷浓度信息Hi之间不匹配,造成漏检或泄漏点判断不准。为了保证最终的定位定性结果满足应用要求,必须全面分析其中每一项误差特性及其对定位结果的影响程度。
2.1.1 GPS 定位误差
在应用GPS定位中,影响定位精度的主要误差来源是GPS时钟误差、多路径效应误差、卫星星历误差、电离层和对流层传播延迟误差以及与接收机有关的噪声误差[8],实测中GPS高度误差要远大于x、y向误差。机载遥感泄漏检测中该位置误差表现为激光束空中矢量的起始端点误差。
2.1.2 角度测量误差
根据低空机载遥感平台作业特点,选择姿态角度传感器的要求是[9]:能提供载机的3个姿态角(θH,θP,θR);体积和质量不能超过载机的有效载荷;数据的刷新率要快于载机姿态响应速度;测量的准确度要满足控制算法的要求;输出要可靠。商用飞机使用的激光陀螺姿态和航向参考系统体积偏大,价格昂贵。目前,比较适用的姿态角度传感器是HMR3000数字罗盘,该罗盘体积小、质量轻,能够快速、准确地获得飞行器航向、俯仰、横滚3个方向上的姿态数据且通过串行通信,易于与工控机实现数据交流,满足系统设计的要求。本文中使用数字罗盘模块HMR3000获取载体的航向、俯仰、横滚3个姿态角。由于HMR3000罗盘对周围硬铁磁场敏感,使用时系统必须进行电磁兼容设计且应在具体使用环境中进行硬铁磁场校正。
2.1.3 机构的执行误差
激光束对管道的定位最终是靠串联的两自由度旋转机构转过相应的角度来实现的。机构在执行时由于机构的制造误差、安装误差以及测量角度的传感器误差和控制系统误差等导致执行时激光会偏离理论角度从而影响其在地面的定位精度。实测本系统中机构方位角和俯仰角的重复定位精度分别为0.2°和 0.1°。
2.1.4 跟踪滞后误差
载机位姿传感器采集到的位姿数据经坐标转换解算出执行机构的方位角和俯仰角,到执行机构执行完该角度,要花费一定时间,且这期间载机一直处于运动状态,势必导致采样点滞后。这部分误差可根据载机速度通过动态位置修正给出超前瞄准量解决。
2.2 自主定位误差基本计算
根据载机在某一时刻的位姿,经过一系列的齐次坐标变换计算求出激光束指向检测点的方位角和俯仰角,由机构执行后会在待检测管道上得到一个激光束的对应点。如果计算和执行中均不存在误差,则对应点处于理论位置 T(xt,yt,zt)。反之,其对应点将偏离理想位置而处于其实际位置T'(x't,y't,z't),两者的偏差值则综合体现了各影响定位因素的误差量值。
(1)理想位置(xt,yt,zt)。参照式(3)可得理想位置(xt,yt,zt) 的坐标计算公式。
(2)实际位置(x't,y't,z't)。设由于各项误差的存在导致激光束的实际指向为PT',该向量在x、y、z方向的分量分别用 m'、n'、k'表示,m'、n'、k'由影响定位的各参数加上误差后算得。
实际激光束的直线方程为

(x0,y0,z0)为 GPS 测得的载机位置。
因进行机载管道泄漏检测时载机低空飞行,忽略地球曲率的影响,过理论点T以OT为法向量的平面方程为

将t'带入式(7),得到实际激光束在大地坐标系里的位置为


2.3 自主定位误差灵敏性分析
载机位姿精度对定位敏感误差分析步骤如下:
(1)选定待检测管道 AB,其起点为 A(x1,y1,z1),终点为 B(x2,y2,z2),载机位置为 P(x0,y0,z0),载机姿态角为(θH,θP,θR)。
(3)位置偏离量。用 T'(x't,y't,z't) - T(xt,yt,zt)即可得到实际位置与理想位置的差 Δxt、Δyt、Δzt,可得实际扫描点偏离管道上理论扫描点的距离为
(2)利用式(3)计算选定载机位置后的管道上理想定位点位置坐标 T(xt,yt,zt)。
(3)设GPS测得载机位置在x、y、z坐标轴方向上分别产生线位移误差Δx0、Δy0、Δz0并绕载机坐标系的3个坐标轴分别产生转角误差 ΔθH,ΔθP,ΔθR,然后利用式(9)分别计算选定点的实际位置坐标T'(x't,y't,z't),输出 6 组坐标差 Δxt、Δyt、Δzt。
(4)对影响激光在地面定位点的各因素均给出误差,重复步骤(1)至(3)即可计算出所有误差造成的定位点偏差值。
(5)比较相同误差下的计算结果,在众多影响定位的误差源中辨识出敏感误差,提出面向敏感误差的定位精度控制策略,在合理成本下高效控制机载激光对埋地管道定位的精度。
2.4 分析示例
由激光对管道自主定位的原理可知,激光对管道自主定位误差敏感方向为定位点在大地坐标系中的x和y方向,故产生Δxt和Δyt大的误差源为敏感误差,产生Δzt的误差源为最不敏感误差。
仿真中模拟实际情况选取载机和管道的各名义值。
待检测管道的位置为
起点A(-2694524.3 m,4304987.4 m,3845653.9 m);
终点 B(-2694124.3 m,4305387.5 m,3845673.2 m)。
载机平台在飞行过程中其位置和空中姿态是始终变化的,其运动状态可用运动速度、偏航、俯仰、横滚4个参数表述,设载机的飞行路线为
x0= -2694606.3+20t+15sin(10πt),
y0=4305118.5+20t+18sin(10πt),
z0=3845770.8+20sin(10πt).
载机姿态方位角 θH=45°+2sin(0.2πt),
载机姿态俯仰角 θP= -20°+5sin(0.4πt),
载机姿态滚转角 θR=10°+5sin(0.4πt).
模拟实际飞行情况,飞机俯仰角和滚转角都有幅度为5°、频率为0.2 Hz的晃动,航向角有幅度2°、频率为0.1 Hz的晃动。参照现有位姿系统测量精度[10-11]并考虑实际工作环境,取载机自身定位误差为10 m,载机姿态误差为2°。
仿真中,利用MATLAB提供的randn()函数经过优化产生质量很好的随机数,利用蒙特卡洛法对激光束在地面的定位点进行仿真。
2.5 仿真结果
利用计算机仿真,分析了载机位姿误差对激光对管道自主定位误差的影响。
载机3个方向的位置误差均反映到地面定位点误差上,如图2所示。其中载机x、y方向位置误差对地面点位置影响几乎相同,对地面定位点x、y的影响较大,z值几乎不受影响;载机z方向位置误差对地面点位置基本无影响。因此,GPS的x、y方向误差为敏感误差,z方向误差为不敏感误差。因采用GPS定位时,载机z方向误差较大,而此方向误差为地面点误差非敏感方向,说明GPS可用于机载测量时载机的定位。

图2 载机位置误差对地面定位精度的影响Fig.2 Effects of position error on positing accuracy
图3分别显示载机方位角、俯仰角、滚转角误差对地面定位点误差的影响。由图3可见:方位角、滚转角误差引起地面定位点x、y方向误差比z方向误差要大很多;俯仰角误差对地面点z方向误差影响较大,而对x、y方向误差影响相对较小。因此,载机的姿态误差中,方向角、滚转角误差为误差敏感因素,俯仰角误差为误差不敏感因素。
图4为载机位置误差10 m,姿态误差2°按给定路线飞行对已知管道进行检测时激光束地面的定位误差。可见载机位姿传感器误差对激光在地面的x、y方向的定位精度影响较大,对z方向定位精度影响较小,因此载机位姿传感器误差为定位点敏感误差,实际使用中必须控制载机位姿传感器误差精度。仿真中地面定位点x、y方向误差都在10 m以内,地面点最大定位误差不超过15 m,平均误差在10 m以内,基本满足机载激光对管道泄漏检测精度的要求。这说明本文仿真所应用的传感器基本可用于机载激光对管道进行泄漏检测。

实际上,对机载激光对管道自主定位误差进行灵敏性分析,可为载机位姿传感器精度选择、执行机构的设计、制造及其后续的误差避免与补偿提供重要依据。
3 误差补偿措施
为保证检测可靠,检测激光束需要时刻跟踪地面铺设的油气管道,由于飞行过程中,载机位置和姿态是时刻变化的,而且受气流影响,可能存在剧烈晃动;同时,通过GPS采集的空中位置信息和罗盘采集的飞机姿态信息存在一定的误差。激光发射装置在空中恶劣的工作环境中,做到光束时刻锁定在很小的一个区域带内,技术难度很高,若使用高精度传感器和执行机构,会使成本大大增加。除可采取隔振措施滤除载机高频振动,设计控制系统消除载机部分低频振动外,在机构设计中可以再增加一个力矩电机,驱动泄漏检测装置做一维横向扫描,由飞机飞行完成另外一维的扫描,让光束沿垂直于管线方向作简单的“Z”型扫描动作,如图5所示。图中v为飞机沿管线的飞行速度,T为扫描周期,d为扫描间隔,w为扫描宽度。这样把对管线的跟踪变为对区域的扫描,提高检测可靠性,并且可降低对传感器精度要求,降低成本。实际应用时,可以根据实际情况,如油气泄漏的空气污染范围,选择合适的飞行速度和扫描周期,设置最佳扫描间距。

图5 扫描示意图Fig.5 Diagram of scanning
4 结论
(1)在性价比可接受的前提下采取精度更高的位置及姿态传感器,特别是姿态传感器中可使用惯导系统提高测角精度,降低定位误差。
(2)进行激光对管道自主定位敏感误差分析可以从众多误差源中识别出对定位精度影响较大者,对这类数量较少的误差源采取针对性措施,无论采用误差补偿法还是误差避免法,均能收到良好的“精度-成本”效果。
(3)定位误差灵敏性分析采用的是齐次坐标变换原理,在现有理论和技术下是可行的。载机位姿的敏感误差分析均通过编程实现。载机位姿误差的敏感性分析方法可应用于分析影响定位精度的其他因素。
(4)提高机载激光对埋地管道进行泄漏检测的可靠性,必须提高激光对待检管道定位的精度,设法解决定位和定性(泄漏检测)的匹配套合精度。
[1]BERERIN A G,MALYUGIN S V.Remote helicopterborne detector for searching of methane leaks[J].Spectrochimica Acta Part A:Molecular and Biomolecular Spectroscopy,2007,66(4/5):803-806.
[2] PANTANI M,CASTAGNOLI F,AMATOF D,et al.Two infrared laser spectrometers for the in situ measurement of stratospheric gas concentration[J].Infrared Physics&Technology,2004,46(1):109-113.
[3]WANG Min,ZHANG Yu-jun,LIU Jian-guo.Applications of a tunable diode laser absorption spectrometer in monitoring greenhouse gases[J].Chinese Optics Letters,2006(6):1007-1100.
[4]陈东,刘文清,张玉钧.开放光程TDLAS系统对北京城区 NH3浓度的连续检测[J].光学技术,2007,33(2):311-314.
CHEN Dong,LIU Wen-qing,ZHANG Yu-jun.Successive measurement of atmospheric ammonia in urban area of Beijing using open-path TDLAS system [J].Optical Technique,2007,33(2):311-314.
[5]刘海芳,王瑞,钟诗胜.机载激光对埋地管道的自主定位[J].光学精密工程,2011,19(8):1723-1729.
LIU Hai-fang,WANG Rui,ZHONG Shi-sheng.Helicopter-borne laser autonomous positioning of buried pipeline[J].Opt Precision Eng,2011,19(8):1723-1729.
[6]张葆,姚峻峰,高利民.机载GPS测量定位技术研究[J].光学精密工程,2009,17(2):172-178.
ZHANG Bao,YAO Jun-feng,GAO Li-min.Measuring orientation technology based on airborne GPS[J].Opt Precision Eng,2009,17(2):172-178.
[7]刘晶红,孙辉,张葆,等.航空光电成像平台的目标自主定位[J].光学精密工程,2007,15(8):1305-1310.
LIU Jing-hong,SUN Hui,ZHANG Bao,et al.Target self-determination orientation based on aerial photoelectric platform[J].Opt Precision Eng,2007,15(8):1305-1310.
[8]尤红建,江月松,李树楷.机载遥感直接对地定位的误差分析和精度估计[J].测绘学报,1998,27:86-91.
YOU Hong-jian,JIANG Yue-song.LI Shu-kai.Error analysis and accuracy estimation of airborne remote sensing with air-to-ground positioning system[J].Acta Geodaetica at Cartographica Sinica,1998,27:86-91.
[9]张强,吴云东,杨天恒.数字罗盘在超低空遥感平台的应用[J].测绘科学技术学报,2007,24(1):43-46.
ZHANG Qiang,WU Yun-dong,YANG Tian-heng.An application of digital compass on the small-hedgehopping remote sensing platform[J].Journal of Surveying and Mapping,2007,24(1):43-46.
[10]王家骐,金光,颜昌翔.机载光电跟踪测量设备的目标定位误差分析[J].光学精密工程,2005,13(2):105-116.
WANG Jia-qi,JIN Guang,YAN Chang-xiang.Orientation error analysis of airborne opt-electric tracking and measuring device[J].Opt Precision Eng,2005,13(2):105-116.
[11] 朱军.机载GPS的技术现状和发展[J].铁路计算机应用,2003,12(2):34-38.
ZHU Jun.Technology of GPS for aerial triangulation and its present situation[J].Railway Computer Application,2003,12(2):34-38.
Sensitivity analysis of orientation error of airborne laser autonomous positioning to gas pipeline
LIU Hai-fang1,2,WANG Rui2,ZHONG Shi-sheng1,LIU Ke-qiang2
(1.School of Mechatronics Engineering in Harbin Institute of Technology,Harbin 150001,China;2.School of Naval Architecture in Harbin Institute of Technology(Weihai),Weihai 264209,China)
Based on the particular application background of the remote sensing detection of the buried natural gas pipeline leak by the airborne laser,the accurate positioning of the buried natural gas pipeline by the laser is prerequisite.The basic theory of the airborne laser-to-ground positioning system was briefed and the realized method was introduced,and the influence of the laser on the positioning system was analyzed.The general error equation of this remote sensing system was derived from the error propagation law and the accuracy under different conditions was estimated.The results show that the position and orientation accuracy of the airborne is the main factor affecting the positioning accuracy.The error in pitch angle plays a more important role in ground point error,while the roll angle has little effect.Under the consideration of point positioning accuracy,the influence of the error in altitude is the least.These analysis results can enhance the efficiency of error prevention and error compensation.
airborne laser;buried pipeline;autonomous positioning;positioning error;error analysis
TE 973.91
A
10.3969/j.issn.1673-5005.2012.02.026
1673-5005(2012)02-0152-06
2011-06-11
国家“863”计划项目(2008AA06Z208)
刘海芳(1971-),女(汉族),山东威海人,副教授,博士研究生,主要从事产品数字化设计与制造、故障诊断方面的研究。
(编辑 沈玉英)
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
南京航空航天大学学报(2022年2期)2022-04-27
保健医苑(2021年9期)2021-09-08
新一代信息技术(2021年9期)2021-07-30
煤炭工程(2019年6期)2019-06-22
中国铁道科学(2019年1期)2019-02-19
舰船电子工程(2018年10期)2018-10-23
科技风(2018年19期)2018-05-14
科技创新与应用(2017年11期)2017-04-27
火控雷达技术(2016年2期)2016-02-06
