基于AMESim的双机并车仿真研究
2012-01-22 11:21,
船海工程 2012年2期
,
(上海交通大学 海洋工程国家重点实验室,上海 200240)
联合动力装置是指不同的动力系统联合,发展至今,有多种多样的形式,最常见的为燃-燃、柴-燃、柴-柴联合动力装置,其中尤其以柴-燃联合为多。
然而,跟传统的柴-燃联合动力装置相比,虽然柴-柴联合动力装置能提供的功率范围相对较小,但在满足需要的情况下,最佳选择仍然是柴-柴联合动力装置,尤其是将数台中速柴油机联合,则更能发挥出柴-柴联合动力装置的优势[1]。
柴-柴联合动力装置(CODAD)主要是将数台柴油机通过齿轮箱并车。与其它的联合动力装置相比,柴-柴联合动力装置具有独特的优点[2]:①能够提供较大的输出功率;②跟耗油率和燃油品质都有高要求的柴-燃联合动力装置中的燃汽轮机相比,CODAD具有更好的经济性;③能提供多种运行模式,可以适应不同的工况需求[3]。
1 试验台介绍
双机并车试验台基本组成见图1。

图1 实验台基本组成
1)试验台的两台柴油机为6105Q和495AC,额定功率为95.6和31.6 kW,额定转速为2 800和2 000 r/min。柴油机均通过轴系与减速齿轮箱相连,且带有全程式机械调速器。
2)该试验台中选用了两种减速齿轮箱。其中6105Q柴油机一侧连接着MB170齿轮箱;而495AC柴油机一侧则连接着S40双速比减速齿轮箱。通过联轴器,齿轮箱与SSS离合器相连。
3)SSS离合器的作用是当输入端与输出端的转速相同时,离合器会自动实现啮合或脱离啮合,从而使动力输入与输出设备连接或分离。
4)并车齿轮箱。与测功器连接。
5)增速器型号为ZDH350,速比1∶3.5。
6)电涡流测功器型号为GW250,该电涡流测功器具有精度高,转速大等优点;另外,其功率调节范围及控制性能也有明显优势,实验可在更精确可靠的工况下进行。
7)测控系统为FC2000发动机自动测控系统,生产商为湖南湘仪动力测试仪器有限公司。该测控系统运用模块化设计技术,通过数字分段PID调节转速及负荷,控制特性无扰动且种类多样,具有良好的安全性能。
2 建立联合动力装置模型
整个双机并车系统由两台柴油机模型(用同一个模型,设置不同参数),传动装置模型、并车控制器模型等几部分组成。总体模型见图2。
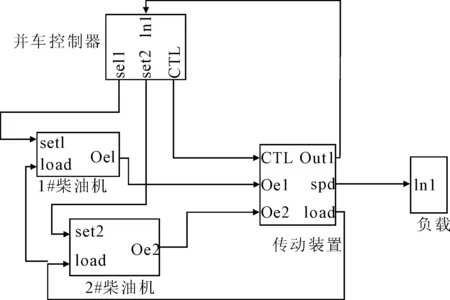
图2 总体模型
2.1 柴油机本体模型
考虑到一般性,在对柴油机建模时,增加了涡轮增压系统、空冷器系统以及集气器系统[4]。另外,由于试验中一台6105Q柴油机具体数据难以获得,因此在试验中,假设两台495AC柴油机的模型进行仿真。柴油机本体模型见图3。

图3 柴油机本体模型
本实验室购买的AMESim软件能够较好地完成物理模拟,对外界环境简化,将输入与输出因素通过物理数值体现在具体模型上,见图4。
2.2 PID调速器模型
PID控制包含PI和PD控制两部分。PID控制器即是根据系统的误差,利用比例积分微分计算控制量而进行的控制[5]。
PID调速器模型见图5,PID参数见图6。
2.3 SSS离合器模型
为了尽量接近SSS离合器实际需求,主要是实现柴油机与柴油机之间动力切换的试验,参考有关资料,利用MATLAB/SIMULINK建立柴油机与柴油机之间切换的SSS离合器模型见图7。
3 仿真结果
初始外界输入转矩值设置为-1 000 N·m,通信时间间隔设为0.001 s,这样每个变量可以得到10 000个数据点,能更好地绘制光谱图。
AMESim软件可与MATLAB/SIMULINK软件结合进行联合仿真,将该模型在SIMULINK模块中调试,SIMULINK仿真见图8。
由仿真结果知,AMESim与MATLAB的振动模型仿真结果极其相似。其中,若考虑数字计算和模拟的准确性,MATLAB更具优势;而AMESim可绘制三维图,能更好地得到模拟对象对于激励从图9中可知对于激励信号的转矩共有4个阶次,分别对应着发动机转速的频率及其2、3、4倍。在这4个阶次中,最为猛烈的是第一阶次,而第二阶次则相对较弱,之后的第三、四阶次则更是微弱。由此可见,在实验中,要考虑尽可能地减少第一、二阶次的出现,防止共振。

图4 AMESim柴油机模型

图5 PID调速器模型

图6PID调速器模型设置

图7SSS离合器模型

图8 联合仿真转矩曲线
信号的反应。对仿真结果绘制三维图,见图9。
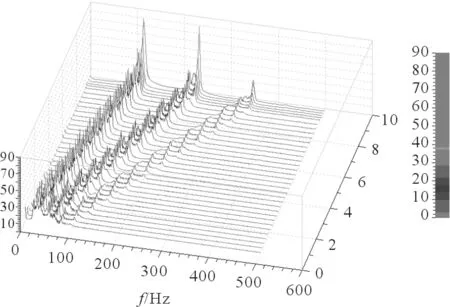
图9 柴油机振动阶次三维图
[1] 侯馨光,张 敏.船舶主柴油机并车运行新方法[J].上海造船,2008(1):24-27.
[2] 吴杰长,陈国钧,安玉昌,等.柴油机并车控制器试验平台及监测分析系统研究[J].内燃机学报,2002(3):257-261.
[3] 王朝红.船舶动力装置双机并车控制方法分析研究[J].船舶,2006(6):32-34.
[4] 蒋德松,林洪贵.电力推进原动机双机并车过程控制特性研究[J].集美大学学报,2006(4):23-17.
[5] 陆金铭.基于MATLAB的柴油机动力装置仿真[J].船舶工程,2002(5):38-40.
猜你喜欢
导弹与航天运载技术(2022年2期)2022-05-09
民用飞机设计与研究(2020年4期)2021-01-21
汽车与驾驶维修(维修版)(2020年1期)2020-04-02
汽车实用技术(2019年24期)2019-12-27
船舶标准化工程师(2019年4期)2019-07-24
价值工程(2017年28期)2018-01-23
北京汽车(2014年3期)2014-03-13
汽车与新动力(2014年5期)2014-02-27
汽车与新动力(2013年5期)2013-03-11
航空知识(2001年5期)2001-06-12