基于色差分析法的清洁机器人的研究
2012-01-13 02:34
电子世界 2012年17期
南昌航空大学飞行器工程学院 刘 科
1.引言
在生活节奏日益加快,工作压力逐渐增强的今天,研究智能清洁机器人把人们从繁琐的家务劳动中解脱出来对改善生活品质、提高生活质量具有重要意义。清洁机器人将成为家居和各大公共场所肩负清洁工作不可或缺的工具。目前市场上各公司生产的清洁机器人大多数没有地面污渍检测功能,针对污渍不同的地面只能做同样的清洁处理,而我们研究的清洁机器人是基于色差分析法,它可以检测出地面上色差较大的污渍,在正常清洁的基础上进行重点清洁直到去除污渍,同时机器人自带清洁水,清洁刷,污渍明显的地方直接喷洒清洁水再用清洁刷强力擦出,去污效果明显,抗光线干扰能力强。机器人根据规划路径清洁整个房间,遇到桌椅等障碍自动避开,可以轻松清除地板上的污渍。
2.清洁机器人
清洁机器人由颜色识别模块,红外避障模块,清洁模块和人机交互模块组成。颜色识别模块通过TCS230颜色传感器将采集的色差信号送给主控器,清洁模块立即响应主控器的命令完成清洁任务。红外避障模块通过远距离红外传感器将采集是否有障碍的数字信号送给主控器,电机驱动将立即响应决定是否避障。主控制器选用STC增强型51单片机STC12C5A60S2,具有高速、高可靠性、低功耗、超强抗干扰能力且价格低廉。电机采用额定电压6V的直流减速电机,通过L298N电机驱动控制简单高效。
与现在网上所卖的成品清洁机器人如“地宝”相比自动色差分析机器人明显的优势在于:(1)它可以对地面的有色污渍进行识别而不是所有的地方都清理。(2)自动色差分析机器人对地面比较潮湿的污渍可以有效清理,而“地宝”对此束手无策。(3)具有自载水的新特性,在需要喷水的地方喷洒适量的清洁水,强化清洁效果。
与现在大多数高校和研发部门研究的基于图像处理的或带机械手的清洁机器人相比自动色差分析机器人也具有以下先进性:(1)图像识别的机器人多采用摄像头实现垃圾识别,而且只能记住特定的垃圾,即识别单一化,而自动色差分析机器人识别颜色多元化;同时摄像头采集图像需要良好的光线,受光线影响大,在光线不好的地方基本无法识别垃圾,而自动色差分析机器人传感器自带光源,识别基本不受光线影响。(2)对于带机械手的机器人一般行动迟缓不灵活,抓取成功率低,实用性差,而且对地面的污渍束手无策,与之相比自动色差分析机器人小巧灵活,检测和擦除成功率高,实用性强,对家居和画室的有色污渍具有良好的清理效果。
2.1 颜色识别模块
TCS230是TAOS公司推出的可编程彩色光到频率转换器。它把可配置的硅光电二级管与电流频率转换器集成在一个CMOS电路上,同时一个芯片集成红绿蓝(RGB)三种滤光器,是业界第一个有数字兼容接口的RGB颜色传感器,引脚与功能框图见图2。
当入射光投射到TCS2300上时,通过光电二极管引脚S2、S3的不同组合,可以选择不同的滤波器;经过电流到频率转换器后输出不同频率的方波,不同的颜色和光强对应不同频率的方波;还可以通过输出定标控制引脚S0、S1,选择不同的输出比例因子,对输出频率范围进行调整,以适应不同的需求[1],如表1所示。
测量频率的方法:设置定时器为一固定时间(例如10ms),然后选通三种颜色的滤波器,计算这段时间内TCS230的输出脉冲数,计算出一个比例因子,通过这个比例因子可以把这些脉冲数变为255。在实际测试时,使用同样的时间进行计数,把测得的脉冲数再乘以求得的比例因子,然后就可以得到所对应的RGB值。
2.2 红外避障模块
如图3所示:红外避障传感器充分利用了物体的反射性质。传感器发射端发射红外线,在设定的范围内,如果没有障碍物,发射出去的红外线,因为传播距离越远而逐渐减弱,最后消失,而如果有障碍物,红外线遇到障碍物后反射,被传感器接收端所接收。
通过对红外传感器的信息进行采集,使用二极管D1发射红外线,二极管D2接收红外信号。红外线发射部分不设专门的信号发生电路,直接从单片机实现时钟频率,既简化了线路和调试工作,又能使电路的稳定性和抗干扰能力大大加强[2]。
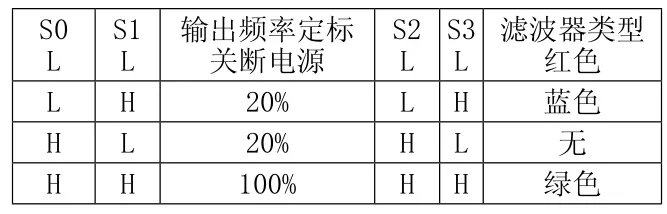
表1 S0、S1及S2、S3的组合选项
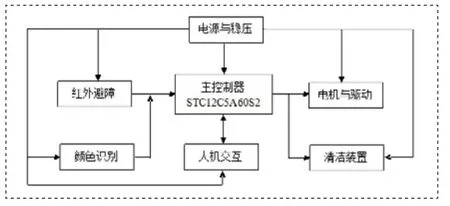
图1 清洁机器人各模块关系图
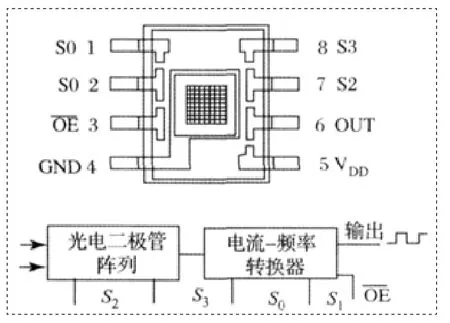
图2 TCS230引脚信号与功能结构框图
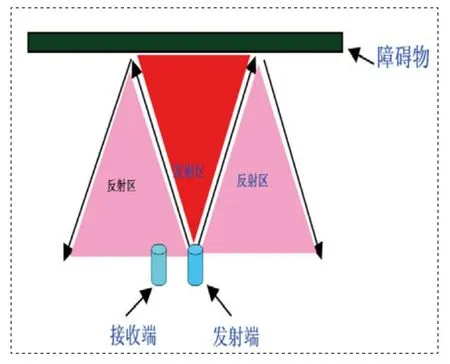
图3 红外避障传感器工作示意图

表2 部分颜色的RGB对照值(16进制)
图4 通过键盘设置液晶显示启动机器人
图5 机器人发现污渍准备靠近
图6 机器人喷完清洁水强力清除污渍
图7 机器人正在自主避开桌椅
2.3 清洁模块
清洁模块由水泵、水箱、继电器、清洁刷、百洁布等组成。机器人运行时遇到污渍比较多地方,单片机将通过继电器控制打开直流微型水泵,清洁水从水箱中经过喷头喷洒到地面,机器人来回移动通过清洁刷和百洁布强力去除地面的污渍。清洁水是洗涤液和自来水按比例混合而成,同时可加入芳香剂,使得清洁后的地面散发香气。清洁刷和百洁布固定在机器人底部,用一段时间后需要及时更换。
2.4 人机交互模块
人机交互模块主要由键盘和OLED液晶显示组成,开机Logo过后将进入参数设置,通过键盘可以选择不同清扫路径:螺旋状路径和梳状路径,以及正常清扫的时间,污渍清扫时间,清洁水喷射时间等。OLED即有机发光二极管,又称为有机电激光显示,具备轻薄,省电等特性。通信协议采用SPI总线,只需要4根信号线连接单片机就可以实时显示并能保持画面。
3.色差分析法
单片机通过TCS230颜色传感器可以定时读取RGB值,根据RGB对照表就可以分析出地面的颜色。机器人出发时要先记录干净地面的RGB值作为参照,当运行到RGB值与参照值相差较大时,即色差大于设定值,就是存在污渍的地面,要进行重点清洁喷洒清洁水,使用清洁刷和百洁布去除污渍,机器人前后来回运动直到污渍清除(这里的清除主要是指当前地面RGB值与参照地面RGB值的色差小于设定值)。
当然可能有些污渍粘性强,多次清扫也无法清除,当清除时间超过预先设定的污渍清扫时间,机器人会继续清扫剩余没有清洁的地面,此处污渍留给主人人工参与清除。当遇到地砖的缝隙时色差比较大,但由于缝隙较小,机器人会认为是误识别,忽略不计。需要特别说明的是色差分析清洁机器人只适用于做颜色比较统一的地面清洁工作,带花纹的地面难以实现清洁功能。
4.实验效果
本文所研究的清洁机器人在实验室环境下运行良好,污渍清除效果明显。该机器人在2012中国服务机器人大赛暨RoboCup家庭服务机器人公开赛上崭露头角,并获得清洁机器人项目亚军。
图4为通过键盘对机器人进行初始参数设置,实现人机交互功能,图5为机器人在行进过程中发现污渍并准备靠近,图6为机器人对污渍地面喷洒清洁水并使用清洁刷、百洁布等清洁工具对地面进行污渍清除,图7为机器人在行进过程中红外避障传感器探测到前方存在障碍物,自主进行避障操作。在实验室环境下,先后使用油渍、果汁、黑胶带等进行多次实验,实验结果表明,除与地面粘性最强的黑胶带以外,该清洁机器人能对其他污渍做有效清除。
5.结束语
本文研究了一种基于色差分析法的清洁机器人,该机器人由各模块间的相互配合,通过单片机控制颜色传感器并自动进行色差分析,依据规划路径对发现的污渍进行强有力的清除,最终实现地面的清洁。实验室环境下运行稳定,效果良好。
清洁机器人未来的市场潜力巨大,将图像识别、色差分析、机械控制等多种技术融合的新型智能机器人必将迅速崭露头角,在机器人领域占有一席之地。
[1]胡建明.颜色传感器TCS230及颜色识别电路[J].单片机与嵌入式系统应用,2006(4):40-41.
[2]雷鹏飞,沈华东,高坎贷,等.红外传感器在智能车避障系统的应用[J].电脑与信息技术,2010,18(4):52-53.
[3]谈士力,沈林勇,陈振华,等.垂直壁面行走机器人系统研制[J].机器人,1996,18(4):232-237.
[4]王磊,艾晓庸,朱齐丹,等.基于LMD18200组件的直流电机驱动器的设计[J].自动化与仪表,2004(1).
[5]王以伦,邓宝林,王洪涛,等.清洁机器人的自动避障控制系统[J].中国科技信息,2005(16):23.
[6]曾岑,陈进,蒋玉杰.智能型室内清洁机器人的研究和发展探析[J].机械制造,2008(10).
[7]梁喜凤.室内地面清洁机器人路径规划[J].中国计量学院学报,2006,17(1):64-68.
[8]王忠锋.基于ARM控制器的清洁机器人的研究[D].江西理工大学,2009.
[9]孙自广,王秦.基于PIC单片机的清洁机器人系统设计[J].广西工学院学报,2009,20(2):47-49.
[10]李伟青,陈广社.基于人工智能的色差分类技术[J].微型机与应用,2007(6):106-109.
猜你喜欢
宝钢技术(2022年2期)2022-07-09
环球时报(2022-05-23)2022-05-23
好日子(2021年8期)2021-11-04
金桥(2021年4期)2021-05-21
上海涂料(2019年3期)2019-06-19
电子制作(2019年7期)2019-04-25
时代汽车(2018年2期)2018-05-31
摄影之友(影像视觉)(2017年1期)2017-07-18
光学精密工程(2016年3期)2016-11-07
科技知识动漫(2016年1期)2016-01-27