
大型可展收支撑臂模态试验研究
2012-01-08 08:31檀傈锰白化同程刚丁锋
航天器工程 2012年6期
檀傈锰 白化同 程刚 丁锋
(北京空间飞行器总体设计部,北京 100094)
1 引言
大型可展收支撑臂具有较高的收藏比,可实现由折叠状态到展开状态的转换,在航天领域得到越来越多的应用。为了防止支撑臂与星上其他系统发生共振,需要掌握其在工程设计要求频带范围内的主要动态特性,包括固有频率、模态阻尼和模态振型。采用有限元模型(Finite Element Model,FEM)进行模态分析,力学模型简化不当、边界处理与实际结构状态存在差异等因素都对分析结果的准确性造成影响[1]。
2 模态试验试件介绍
2.1 支撑臂构造
处于展开状态的支撑臂试件为一格柱式桁架,如图1所示[3],由若干数量的构架单元组成。每个单元由球铰接头、纵梁、横向框架、导向轮和斜拉索组件组成,结构杆件材料为碳纤维/环氧树脂复合材料,拉索材料为钢,球铰接头、导向轮等其余部件材料为不锈钢。用于试验的支撑臂试件长约25m,前端配置负载安装接口。由于纵梁两端为铰接、拉索具有一定弹性,使得支撑臂在振动上具有一定的非线性。

图1 大型可展收支撑臂示意图Fig.1 Sketch of large deployable support beam
2.2 支撑臂安装
支撑臂构架展开时,斜拉索与根部锁止装置均锁定到位。如图2所示,各构架通过弹簧吊挂装置与零重力展开试验架相连,模拟其在轨运行状态。

图2 支撑臂吊挂示意图Fig.2 Sketch of support beam installation
支撑臂坐标系如图2所示,沿中心轴的收拢方向定义为Z 向。弹簧吊挂对试件造成了附加刚度、附加质量和附加阻尼效应,它们与支撑臂主体构架还构成了扭摆和单摆效应。因此,模态试验得到的是支撑臂与弹簧吊挂整个系统在特定边界条件下的模态参数。
3 模态试验方案
支撑臂每一框架单元为中心对称结构。横向框架为固接,相比于伸展方向,横向框架面内刚度较高,在振动过程中形状保持不变。因此,可将伸展臂简化为Y、Z 面内的一个平面,研究其在X 方向上的移动及绕Z 轴的转动。对各铰接位置进行编号,用于传感器和激振器布置。负载安装接口为1点,其余位置沿Z 向依次编号。
3.1 响应点数目和位置选取
响应点的数目和位置应以全面表征的各阶模态振型为目的,同时避免对结构局部质量和刚度影响过大。根据文献[4]中的方法和经验初步选取传感器安装位置,在此基础上,根据有限元模型模态分析结果,采用模态置信准则(Modal Assurance Criterion,MAC)对响应点评价。MAC矩阵表示如下:

式中:(φt)i、(φa)j分别为第i阶、第j阶的全模型和试验模型的模态向量矩阵。以MAC 矩阵非对角元素最小化为目标对响应点数量和位置进行优化,要求MAC 矩阵对角线元素>0.9,非对角线元素<0.1。将具有1464个自由度的全模型FEM 简化为具有21个自由度的试验模型。图3(a)为响应点位置优化前后的MAC 矩阵,左侧矩阵中的黄色区域表示优化前支撑臂的第一阶和第二阶振型具有一定的相似性,优化后各阶振型区分明显。图3(b)为优化完成后的响应点布局(图中黄色圆点),部分响应点编号如图3(b)所示。

图3 MAC矩阵及响应点分布Fig.3 MAC matrix and sensor locations
3.2 激励点位置选取
激励点的选取首先考虑刚度和平均模态位移较大的点,并保证激振器对结构的耦合影响和激振器间的相互影响尽量小[5]。采用激励点留数(DrivingPoint Residue,DPR)方法找到最适于试件激励的位置。如图4所示,对激励点留数计算结果排序有最大、最小、平均和加权平均4种方式,以加权平均最小作为选择依据。

图4 激励点留数Fig.4 Exciting point residues
通过计算激励点留数[6],得到前5个优选自由度,如图4所示,最终选择1点和25点的X 向进行激励。
烟台市通过大力实施生态建设工程,不断加大环境保护力度,加强重点流域湿地建设,推动森林和湿地资源实现稳步增长。今年以来,烟台市完成造林11.68万亩,森林抚育20万亩,湿地保护与修复7.6万亩,生态环境持续改善。
3.3 激励方法选择
多点随机激励方式适用于模态辨识,且此种激励与航天器在轨实际工况比较接近。正弦激励方法可直接观测处于共振中的结构特性参数,但该方法耗时较长,适用于频率范围已知的情形。在本试验中,采用多点随机和单点步进正弦两种激励方法,激振力的量级根据不同的试验方法和实际情况在试验过程中调整确定。
3.4 模态试验系统
模态试验系统组成如图5所示,系统由激励子系统、数据采集子系统和模态分析子系统组成,设备主要技术参数见表1。

图5 模态试验系统示意图Fig.5 Sketch of test system
激励子系统包括激振器、功率放大器、力传感器和数据采集系统的激励信号发生器组成。2台激振器用于多入多出(Multiple Input Multiple Output,MIMO)的随机激励试验,1台激振器用于单点步进正弦试验,2个力传感器用于激振力的测量。
数据采集子系统包括加速度计和数据采集处理前端。6个电容式加速度计用于响应测量。数据采集处理前端包含有3块24位低频电压输入模块和1块24位的信号源输出模块。
模态试验的激励控制、响应测量、数据处理和模态分析,都在LMS Test Lab 11B软件下完成。
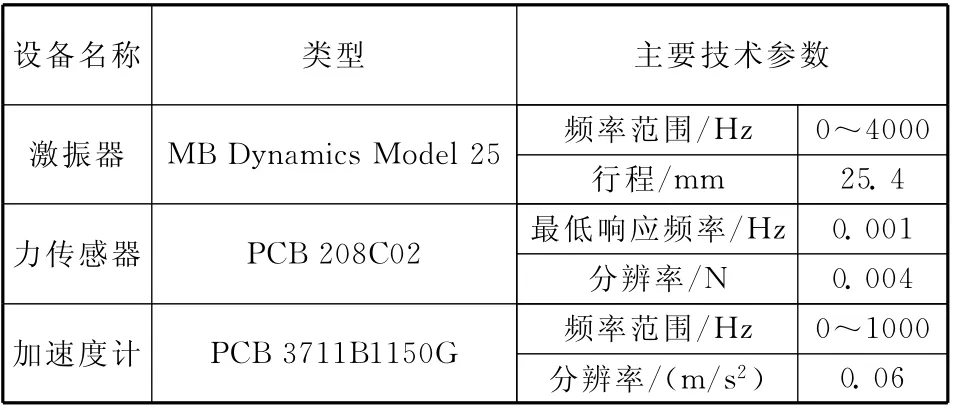
表1 设备技术参数表Table 1 Equipment parameters list
4 试验实施
在试验过程中,采用多点随机激励和单点步进正弦激励2种试验方法。对猝发随机和平稳随机2种激励信号进行了对比,以测试数据具有较好相干性作为评判依据[7-8]。在步进正弦激励试验中,为节省试验时间,在不同频率范围内采用不同的扫描速率。由于传感器数量有限,每次模态试验分为3部分测试完成。
4.1 随机激励方式试验条件的确定
图6为采用不同量级激振力量级(0.5V、1V、2V,通过控制输出电压实现控制激振力的量级)获得的频率响应函数(Frequency Response Function,FRF)曲线和相干函数[6]曲线,激振力较小的情形(图6中红色曲线)在1 Hz以下具有一个较高的峰值,而当激振力较大时测量结果的相干性较好。
图7为采用平稳随机信号和猝发随机信号分别进行激励的相干函数曲线,可见,针对支撑臂这种低频、振动响应具有非线性的结构,平稳随机信号比猝发随机信号更具有适用性。
综合以上分析,在多点随机激励试验过程中,所选择的试验条件参数是:平稳随机激励,激振力量级0.5V,频率带宽为0~16Hz,分辨率f=0.015 6Hz。

图6 不同量级激振力的FRF和相干函数对比Fig.6 FRFs and coherence for different excitation level

图7 平稳随机信号与猝发随机信号相干函数对比Fig.7 Coherence for stationary random signal and burst random signal
4.2 步进正弦激励方式试验条件确定
在步进正弦激励试验中,一个重要参数是扫描速率。分别进行了0.001Hz/s和0.005Hz/s两种不同扫描速率的激励响应对比,如图8所示,可见当扫描速率较大时,FRF 曲线(图8 中蓝色曲线)在1.4Hz时的峰值较小,且两种扫描速率下FRF 曲线峰值频率有一定的偏差。随着扫描速率的下降,结构有更多的时间对输入作出响应,所以,峰值频率更接近所关心模态的实际稳态峰值频率。
图9为激振力信号的自功率谱密度,在低于0.5Hz时信号的能量级非常小,对准确获得该频段内的模态频率造成较大影响。

图8 不同步进速率下的FRF曲线Fig.8 FRF at various step rates

图9 激励信号的功率谱Fig.9 Power spectrum of exciting signal
本文主要获取支撑臂的低频响应特性,为节省试验时间,所选试验条件为:扫描频率带宽为0.1~10Hz,在0.1~1 Hz范围内扫描速率0.001 Hz/s,1~10Hz范围内扫描速率0.01Hz/s。
5 试验结果分析及验证
5.1 试验结果分析
图10为支撑臂模态试验的稳态图,由于结构振动响应非线性较大,在图10(a)上有多个虚假模态,需要根据工程经验和模态振型将虚假模态剔除掉。通过图10(b)可以看出,由于力传感器、加速度计在0.5Hz左右的低频响应相对较差,稳态图内低频段峰值相对不明显。
图11为支撑臂模态试验得到的前6阶模态振型,可看出各阶模态振型较为清晰,获得了较为准确的试验结果。
表2为采用单点步进正弦和多点随机2种激励方法分别获得的支撑臂系统模态参数,在高频部分(2Hz以上)2种激励方法得到的固有频率相差在5%以内,而低频部分2种激励方法得到的固有频率相差7.20%,并且采用平稳随机激励方法没有得到支撑臂的第一阶弯曲振型。由图7可以看出,平稳随机激励方法获得的响应信号相干性较差,此方法在研究支撑臂此类低频、振动响应具有非线性结构的模态特性上适用性较差。

图10 模态试验稳态图Fig.10 Stabilization diagram of modal test

图11 支撑臂模态振型示意图Fig.11 Mode shapes of support beam

表2 不同激励方法下支撑臂模态参数对比Table 2 Comparison of modal parameter for different excitation method
表3中将支撑臂模态试验结果与FEM 分析结果进行了对比,FEM 分析没有得到第二阶扭转模态,具体原因需要进一步分析研究。试验结果与FEM 分析结果在第二阶以后相差较小,但第一阶固有频率相差7.44%,相对较大,同时根据试验结果发现,支撑臂系统第一阶弯曲模态的阻尼比较大,达到了5.32%(见表2),针对此种情况需做进一步分析。

表3 试验结果与FEM 分析结果比较Table 3 Comparison of test result and FEM analysis result
5.2 模态验证
表4为根据试验模态数据建立的MAC 值矩阵,非对角线元素值相对较小,模态辨识理想,试验结果可靠。

表4 支撑臂模态MAC矩阵Table 4 MAC matrix for support beam modal test
6 结束语
本文针对大型可展收支撑臂开展了模态试验研究,结合有限元方法对试验结果进行了分析,试验结果较好地反映了支撑臂的动力学特性。对于低频、振动响应非线性的伸展机构的模态试验,多点随机激励法在辨识低频部分模态时适用性较差。为获取系统的低频模态参数,可采用步进正弦激励方法。采用有限元方法确定激励点位置和响应点数量及位置,可实现采用尽量少的传感器充分捕获系统各阶模态参数的效果。本文的研究内容对于开展太阳翼、展开天线等具有低频、大挠度、振动响应非线性特点的大型部件的模态试验具有一定的借鉴意义。
(References)
[1]周志成,曲广吉.星载大型网状天线非线性结构系统有限元分析[J].航天器工程,2008,17(6):33-38 Zhou Zhicheng,Qu Guangji.Nonlinear finite element analysis of large mesh deployable antenna on satellite[J].Spacecraft Engineering,2008,17(6):33-38(in Chinese)
[2]吴素春,贾文成,邱吉宝.载人运载火箭全箭模态试验[J].宇航学报,2005,26(5):531-534 Wu Suchun,Jia Wencheng,Qiu Jibao.Integrated modal test for the manned launch vehicle[J].Journal of Astornautics,2005,26(5):531-534(in Chinese)
[3]程刚,丁锋,柴洪友,等.基于空间干涉遥测的大型可展收支撑结构研究[J].机械设计与制造,2009,5:145-146 Cheng Gang,Ding Feng,Chai Hongyou,et al.Re-search on the large deployable support beam based on space remote interferometry[J].Machinery Design &Manufacture,2009,5:145-146(in Chinese)
[4]Kammer D C.Sensorplacement for on-orbit modal identification and correlation of large space structures[J].Journal of Guidance,1991,14(2):2984-2990
[5]Larson C B,Zimmerman D C,Marke E L.A comparison of modal test planning techniques:excitation and sensor placement using the NASA 8-bay truss[C]//Proceedings of 12th International Modal Analysis Conference.Washington:NASA,1994
[6]沃德·海伦,斯蒂芬·拉门兹.模态分析理论与试验[M].白化同,郭继忠,译 .北京:北京理工大学出版社,2001 Ward Heylen,Stefan Lammens.Modal analysis theory and testing[M].Bai Huatong,Guo Jizhong,translated.Beijing:Beijing Institute of Technology Press,2001(in Chinese)
[7]Gaspar J L .Development of modal test techniques for validation of a solar sail design[C]//45th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics & Materials Conference.Washington:AIAA,2004
[8]Buehrle R D,Templeton J D,Reaves M C,et al.Ares I-X flight test vehicle:stack 5modal test,NASA/TM-2010-216183[R].Washington:NASA,2010
猜你喜欢
工业建筑(2022年2期)2022-06-29
新高考·高三数学(2022年3期)2022-04-28
兰州交通大学学报(2022年2期)2022-04-26
科教导刊·电子版(2021年26期)2021-11-29
水电站设计(2020年4期)2020-07-16
空气动力学学报(2018年6期)2018-12-03
中学生数理化·高一版(2018年6期)2018-07-09
科技创新与应用(2018年2期)2018-01-19
理科考试研究·高中(2017年7期)2017-11-04
中国科技纵横(2017年18期)2017-10-25