
一类具有输出时滞的随机系统的H∞控制
2011-12-26 07:56:08何纪
常州信息职业技术学院学报 2011年6期
何 纪
(1.常州信息职业技术学院 江苏常州 213164 2.江南大学 江苏无锡 214122)
一类具有输出时滞的随机系统的H∞控制
何 纪1,2
(1.常州信息职业技术学院 江苏常州 213164 2.江南大学 江苏无锡 214122)
研究了一类状态和输出具有时滞的不确定随机系统的鲁棒H∞控制问题,目的是设计具有线性时滞的状态反馈控制器,使得对所有容许的不确定性,闭环系统是均方渐近稳定的。采用Lyapunov泛函方法,以LMI形式给出控制器存在的时滞无关充分条件,通过数值算例验证所得结论的可行性和有效性。
鲁棒H∞控制;线性矩阵不等式(LMI);随机系统;反馈时滞
0 引言
自从1998年Hinrichsen等提出利用LMI方法研究随机系统H∞控制以后,随机时滞系统的鲁棒H∞控制问题受到了广泛的关注。文献[1]、[2]给出了不确定随机时滞系统的鲁棒H∞控制问题,分别设计了H∞状态反馈控制器和H∞输出反馈控制器,文献[3]解决了时滞系统的无记忆H∞控制器的设计问题。但是上述文献中都没有涉及控制输出时滞的随机系统鲁棒H∞控制问题的研究。本文针对状态和控制输出同时具有时滞的不确定随机系统进行讨论,得出了相应的结论。
1 系统描述
系统如下不确定线性随机时滞系统∑:

上面(1)、(2)、(3)式中x(t)∈Rn为状态变量,u(t)∈Rm为控制输入,v(t)∈Rp为干扰输入,z(t)∈Rq为控制输出,h是状态和控制输出的有界常时滞,满足0<h< μ < ∞,h,μ,是实常数,φ(t)∈Rn是定义在[-μ,0]上的连续的初始向量函数,ω(t)为标准一维布朗运动,满足Edω(t)=0,E{dω(t)2}=dt,E{·}为期望。系统中,A,A1,E,E1,B1,B2,Bv,Ev,C,D,G,是已知适当维数的实常数矩阵,ΔA(t),ΔA1(t),ΔE(t),ΔE1(t),ΔB1(t),ΔB2(t)是未知的不确定时变矩阵函数,满足以下形式:

其中:HA,HA1,HE,HE1,HB1,HB2是已知的适当维数的实常数矩阵,F(t)∈Rk×l是Lebesgue可测未知的时变矩阵函数,且满足


那么,称系统是均方渐近稳定的。
定义2:给出标量 γ>0,不确定随机系统(1)~(3)(其中,u(t)=0)在干扰衰减度γ下是鲁棒随机稳定的,是指系统是鲁棒随机稳定的,且在零初始条件下,对任意非零的v(t)∈L2[0,∞)和所有容许的不确定矩阵函数 ΔA(t),ΔA1(t),ΔE(t),ΔE1(t)均有

引理1[4]:A,D,S,W,F是给定的适当维数的实矩阵,且W>0和FTF≤I,则下列结论成立:
1)对任意标量ε>0和向量x,y∈Rn,有

2)对于任意标量ε>0,如果W-εDDT>0成立,有

2 主要结果
定理1:考虑系统(∑),假设v(t)=0,如果存在矩阵Q>0,X>0,Y1和Y2使得下面的LMI成立:

其中Ω=AX+B1Y1+XAT+Y1TB1T+ε1MMT+Q
那么闭环系统鲁棒随机稳定。此时可取相应的线性状态反馈控制器为

证明:将反馈控制器作用于系统∑得到(其中v(t)=0):


另一方面,将(5)式两边左乘、右乘矩阵diag(P,P,I,I,I),并运用Schur补引理,可以得到Γ<0,由(13)式,可知LV(x(t),t)<0,因此闭环系统(7)是鲁棒随机稳定的。
定理2:考虑系统(∑),如果存在矩阵Q>0,X>0,Y1和Y2使得下面的LMI成立:
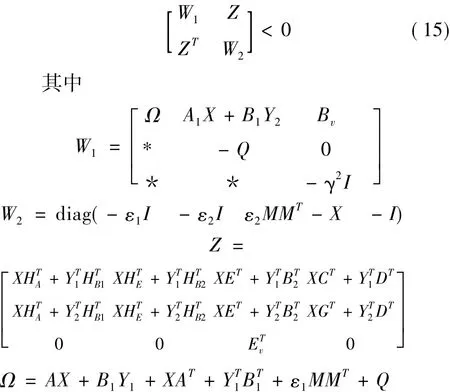
则系统是鲁棒随机H∞可控的。此时,相应的状态反馈控制器取为
证明:将反馈控制器作用于系统Σ得到:

其中AK1(t),A1K2(t),EK1(t),E1K2(t)参照(8)式给定。
根据定理1可以方便得到,该系统是鲁棒随机稳定的。
以下证明,该系统在零初始条件下(当t∈[-μ,0]时,φ(t)=0),对于任意非零变量v(t)∈L2[0,∞),总有:
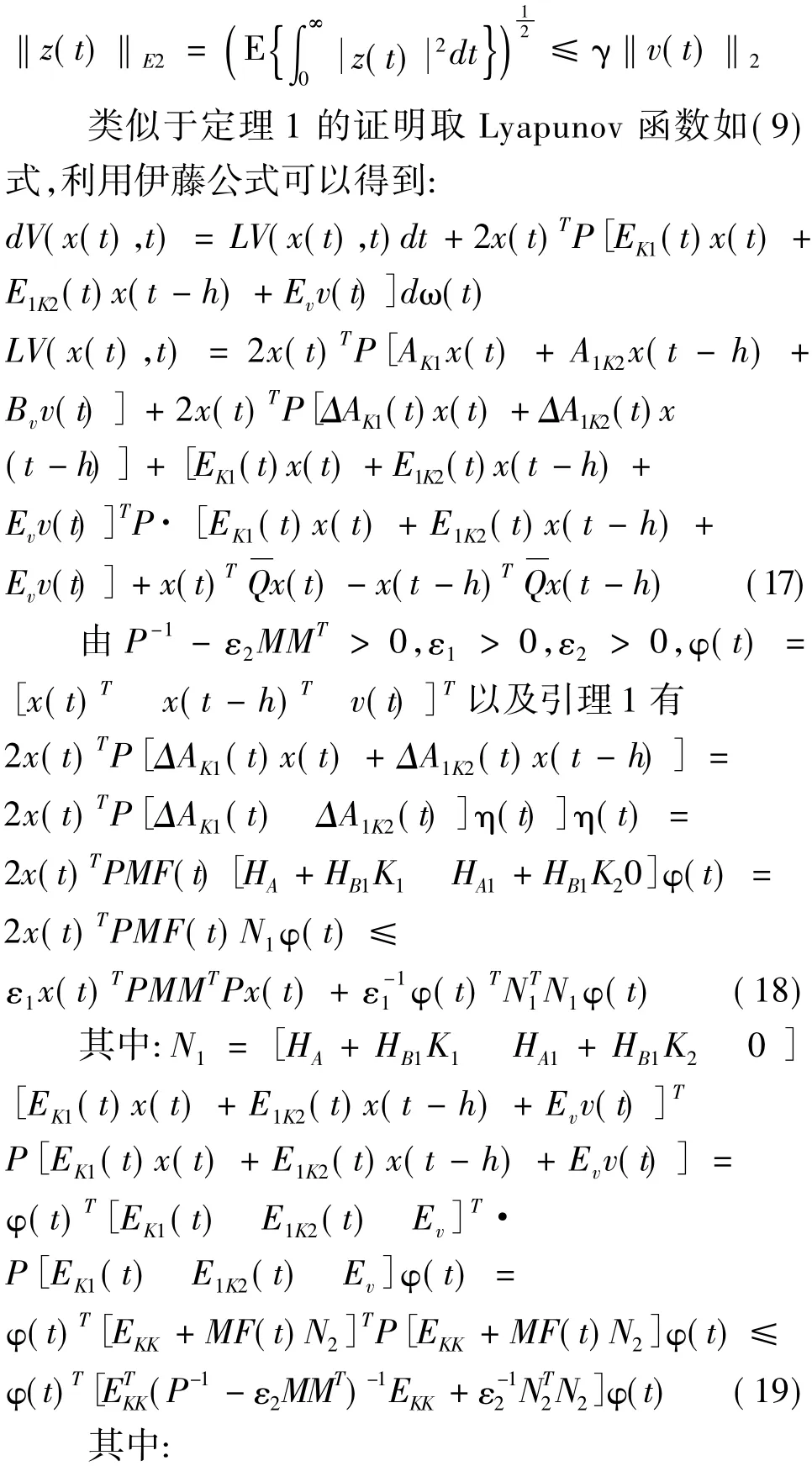

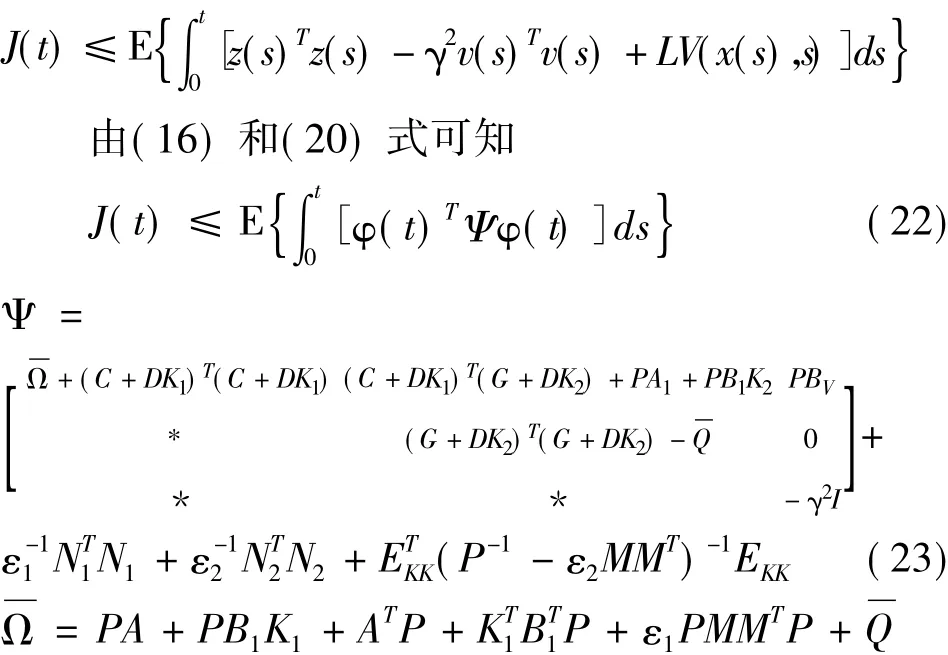
另一方面,将(15)式两边左乘、右乘矩阵diag(P,P,I,I,I,I,I),根据Schur补引理,可以得到Ψ <0,由(22)式可知J(t)<0,因此闭环系统(16)式在干扰抑制度γ下是鲁棒随机稳定的。证毕。
3 数值算例
考虑如下系数的不确定线性时滞系统(1):

通过Matlab中的LMI工具箱求解线性矩阵不等式(15)可得:
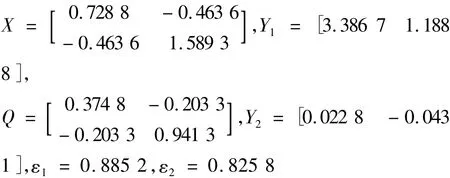
从而得到H∞状态反馈控制器为:u(t) =[6.290 2 2.583 0]x(t)+[0.017 3 -0.022 1]x(t-h)
4 结束语
本文研究了状态和控制输出同时具有时滞的不确定随机系统的鲁棒镇定及鲁棒随机H∞控制问题。定理1给出了设计一个无记忆的状态反馈控制器,对于系统容许的所有不确定,闭环系统式鲁棒稳定的充分条件;定理2研究的是,对于给定的干扰γ=0,设计一个无记忆的状态反馈控制器,对于系统的所有不确定,闭环系统在干扰衰减度γ下是鲁棒随机稳定的。结果以LMI的形式表达,可以利用MATLAB方便求解。类似还可以研究该系统的保成本控制和非脆弱控制。
[1] Xu S Y,Chen T W.Robust H∞control for uncertain in stochastic systems with state delay[J].IEEE Transactions Autormatic Control,2002,47(12):2089-2091.
[2] Zhou K et al.Robust performance of systems with structured uncertainties in state space[J].Automatica,1995,31(2):249-255.
[3] Choi H H,Chung M J.Memory less H∞controller design for linear systems with delayed state and control[J].Automatica,1995(31):917-919.
[4] Wang L,Xie L,De Souza C E.Robust control of a class of uncertain nonlinear systems[J].Systems and Control Lerrers,1992(19):139-149.
RobustH∞Control for a Class of Stochastic Systems with Output Delay
HE Ji1,2
(1.Changzhou College of Information Technology,Changzhou 213164 2.Jiangnan University,Wuxi 214122,China)
This paper investigates the problem of robust H∞control for a kind of stochastic systems with state-delays and output-delays with the purpose of designing a linear state feedback controller which ensures the closed-loop system to be mean-square asymptotically stable.A sufficient condition of this problem is given based on Lapunov functional theory approach,by a linear matrix inequality(LMI).Finally we provide an example to show the effectiveness of the proposed method.
RobustH∞control;linear matrix inequalities(LMI);stochastic system;feedback delay
O 231
A
1672-2434(2011)06-0032-04
2011-09-12
何 纪(1982-),男,讲师,从事研究方向:系统控制工程
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:44
数学物理学报(2020年5期)2020-11-26 06:06:48
数学物理学报(2020年3期)2020-07-27 01:19:56
自动化学报(2019年6期)2019-07-23 01:18:18
自动化学报(2017年4期)2017-06-15 20:28:54
数学物理学报(2016年5期)2016-08-24 07:38:40
数学物理学报(2016年6期)2016-04-16 04:40:58
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:42
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:42
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:20
