基于纹理感知的目标检测方法*
2011-12-07 06:46李正周李文艳
弹箭与制导学报 2011年1期
谭 菊,李正周,李文艳
(1重庆大学通信工程学院,重庆 400030;2重庆文理学院,重庆 610209)
0 引言
地面背景既有各种地形地貌(山谷、河流、树林、沙漠等)的差异,又有季节变化带来的背景变化(大雪、植被四季变化等),因此检测与跟踪混杂在自然环境的人造目标是一个极具挑战的研究方向。
动物能从复杂背景中快速、准确的识别与跟踪目标。视觉心理学研究表明,目标检测的任务分两步完成,即预注意和注意[1-2]。预注意主要实现将图像中具有特殊涵义的不同区域区分开来,分析和标注其与注意目标相似程度,是减小目标检测区域、保证目标检测方法具有低虚警概率和高探测概率的有效手段,也是实现目标识别与跟踪的前提。
Itti模型是目前代表性的视觉注意计算模型[3-5]。该注意模型直接建立在初级阶段提取的局部特征的基础上,是基于空间区域的注意。它通常只考虑了局部几何或亮度特征,而忽略了知觉组织规律体现在分割合理性上的主观尺度,与生物视觉能够以目标为单位进行检测和扫视不相符合[6-8]。
图像纹理是指图像的局部灰度起伏,在一定空间范围内按某种规律重复出现的局部模式和排列规则,反映宏观意义上灰度变化的规律。因此提取区域纹理和融合相似纹理区域是突破局部特征限制,实现知觉组织过程的有效手段之一[9-10]。文中在Itti模型的基础上,采用灰度共生矩阵提取纹理特征,融入自顶至底的纹理粗糙度感知过程,提出一种基于视觉纹理粗糙度感知的目标检测方法。
1 基于纹理特征的显著性感知模型
图1为文中在Itti模型的基础上提出的基于纹理特征的显著性感知模型,主要包括纹理、强度和方向三个特征计算模块和非线性多特征融合函数。该模型首先提取图像的强度和方向等初级视觉特征,并通过Center-Surround算子计算各种特征在不同尺度下的视觉反差[11],得到各自特征的特征图,同时提取图像景物的纹理特征图,最后把不同特征图通过非线性函数进行融合形成显著图,从而得到反应视觉显著信息的注意焦点。由于方向、强度多通道多尺度计算过程与Itti模型一致,文中不再赘述。下面对模型中的纹理感知和非线性特征融合进行分析。
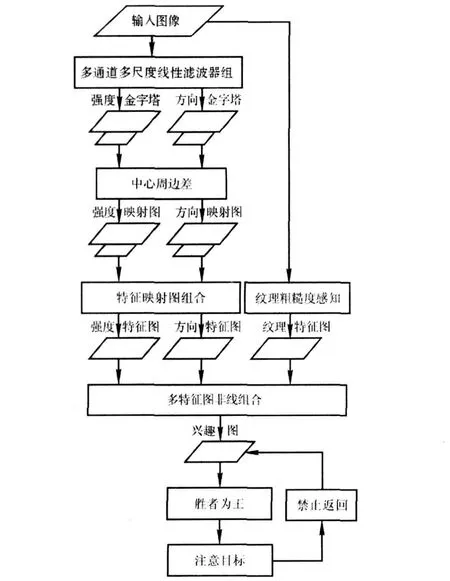
图1 基于纹理特征的显著性感知模型
1.1 非线性特征融合
设强度特征图、方向特征图和纹理特征图分别为Sq(s)、Sd(s)和St(s),空间兴趣图S(s)为上述特征的线性或非线性组合,即:

式中:s表示_特征显著区域,S q(s)、S d(s)和S t(s)均需规范到 0,1_区间内,α、β和λ分别为强度特征图、方向特征图和纹理特征图的权重系数,并满足α+β+λ=1。
自然景物的纹理特征较人造物体的纹理明显,它的粗糙度等纹理特征往往较人造物体强。因此,为了抑制自然背景,突出人造物体,文中采用非线性加权方式计算纹理特征区域的加权系数λ,即:

1.2 纹理特征提取与融合
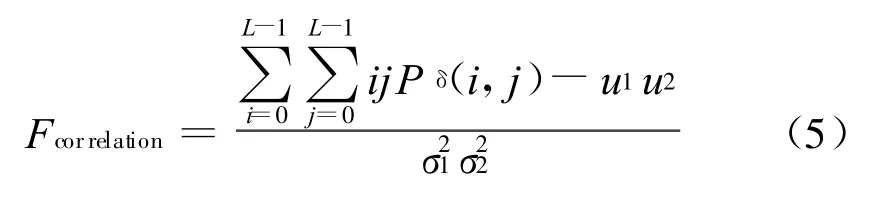
纹理分布是由灰度分布在空间位置上反复出现而形成的,因而在图像空间中相隔一定距离的两像素间会存在一定的灰度关系,这种关系被称为是图像中灰度的空间相关特性。如图像的灰度级定为L级,灰度共生矩阵Pδ为L×L矩阵,即:

式中:Pδ(i,j)表述矩阵元素;i、j分别为两个像素的灰度;L为图像的灰度级数;δ为两个像素间的位置关系,用δ=(Δx,Δy)表示,即两个像素在x方向和y方向上的距离分别为 Δx、Δy,不同的 δ决定了两像素间距离和方向(一般在 0°、45°、90°和135°四个方向)。
文中用到的纹理特征参数有对比度Fcontrast、自相关系数、熵和粗糙度,它们的定义为式(4)~式(7)。

式中:n=i-j 。对比度可以理解为景物的清晰度,即纹理的清晰程度。纹理的沟纹越深,则其对比度F contrast越大,图像的视觉效果越清晰。

熵值是景物所具有的信息量。若景物充满着细纹理,则Pδ(i,j)的数值近似相等,则熵值 F entr opy最大;若图像中分布着较少的纹理,Pδ(i,j)的数值差别较大,则该图像的熵值F entropy较小。

根据以上对纹理特征的定义可知,主观上景物纹理越强,则对比度、自相关系数、熵和粗糙度取值越大。在没有先验知识的情况下,采用平均加权方式组合四种纹理特征参数形成纹理特征图,即:

自然景物的纹理特征较人造物体的纹理明显,它的St(s)取值较人造物体St(s)的取值大。通过式(1)和式(2)非线性融合形成的空间兴趣图S(s),人造物体S(s)的取值则较自然景物的取值大,更为明显。
2 试验结果与分析
利用文中算法和Itti模型对以地物为背景的飞机目标图像进行了检测对比试验。图2为测试序列图像数据中一帧图像,有飞机以及树木、山坡、草地等自然背景及噪声,其中飞机是需注意和跟踪的目标。
图3为采用Itti模型计算出的空间显著图,显著程度以灰度亮度不同表示,即区域显著性越强则越亮。树木表现出比飞机、草地较强的边缘特征,在空间显著图上最为显著,飞机次之,而草地最弱。


图4为Itti模型的检测结果。它首先检测到显著性最强的树木,之后检测到飞机,最后是草地。需注意的是,由于整个树木被分离为多个显著度不同的区域,Itti模型对树木进行多次视觉焦点转移,多次检测到树木的局部。这是它只考虑了局部几何或亮度特征,而忽略了知觉组织规律体现在分割合理性上的主观尺度的局限所造成的。
图5为纹理特征图,树木的纹理显著性最强,之后为草地,最后是飞机。同时,由于利用纹理特征相似性准则,合并相邻区域,整个树木被区分为一个整体。


图6为文中算法所形成的空间显著图,以灰度亮弱不同表示区域的显著性差异。通过非线性融合亮度、方向和纹理特征后,飞机人造目标最为显著。
通过注意空间显著图,进行精细特征提出和分辨,提取感兴趣的目标,如图7所示。文中提出的融入纹理感知的目标检测方法能更为准确的排除干扰,检测到感兴趣的人造目标。


3 结论
纹理感知是生物视觉系统的重要功能,人造目标与背景景物存在的纹理差异是区别两者的显著特征之一。文中在Itti模型的基础上融入自顶至底的纹理粗糙度感知过程,提出一种基于视觉纹理粗糙度感知的目标检测方法。理论分析和实验结果表明,该方法能快速、准确地从背景中发现人造目标,减少目标的截获时间,提高目标检测性能。同时,该模型融入了纹理粗糙度和相似性等特征来组织目标,其效果更接近人的主观感知。
[1] 张鹏,王润生.基于视点转移和视区追踪的图像显著区域检测[J].软件学报,2004,15(6):891-898.
[2] 罗四维.视觉感知系统信息处理理论[M].北京:电子工业出版社,2006.
[3] L Itti,C Koch.Computational modeling of visual attention[J].Nature Reviews Neuroscience,2001,2(3):194-203.
[4] Laurent Itti.Models of bottom-up and up-bottom visual attention[D].California Institute of Technology,2000.
[5] L Itti,C Koch.Feature combination strategies for salience-based attention system[J].Journal of Electronic Imaging,2001,10(1):161-169.
[6] 韩世辉.视觉信息加工中的整体优先性[J].心理学报,2000,32(3):337-347.
[7] 陈锋,韩世辉,朱滢.视知觉组织及其神经机制[J].心理科学,2003,26(2):312-314.
[8] 杨文璐,张丽清,麻力波.内容和运动方向感知计算模型[J].中国科学,2008,38(4):386-397.
[9] Chaudhuri B B,Sarkar N.Texture segmentation using fractal dimension[J].IEEE Transactions on Pattern A-nalysis and Machine Intelligence,1995,17(1):72-77.
[10] Clausi D A,Bing Yue.Texture segmentation comparison using grey level co-occurrence probabilities and Markov random fields[C]//Proceedings of the17th International Conference on Pattern Recognition,2004,Vol.1:584-587.
[11] 李由,张恒,雷志辉.基于生物视觉center-surround机制的光团目标检测与跟踪[J].应用光学,2008,29(2):283-288.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
少儿科学周刊·儿童版(2021年20期)2021-12-11
发明与创新(2021年17期)2021-07-05
空间科学学报(2020年1期)2021-01-14
学生天地(2020年29期)2020-06-09
软件(2020年3期)2020-04-20
模具制造(2019年4期)2019-06-24
摄影之友(影像视觉)(2018年12期)2019-01-28
作文大王·中高年级(2018年7期)2018-08-18
汽车文摘(2017年4期)2017-12-07