基于AR模型光纤陀螺温度建模方法研究
2011-11-27 05:49周益,李勇,张峰
空间控制技术与应用 2011年5期
周 益,李 勇,张 峰
(1.北京控制工程研究所,北京100190;2.北京航天时代光电科技有限公司,北京100854)
基于AR模型光纤陀螺温度建模方法研究
周 益1,李 勇1,张 峰2
(1.北京控制工程研究所,北京100190;2.北京航天时代光电科技有限公司,北京100854)
针对光纤陀螺随机误差信号特点,在分析其一般时间序列模型的基础上,将AR建模方法运用于随机误差信号的建模,得到陀螺随温度变化的真实趋势,然后利用数学方法建立陀螺的动态温度误差模型,对陀螺的输出进行实时补偿.经过仿真分析表明,通过以上方法的处理后,陀螺在-20℃~50℃全温范围内的零偏极差不超过0.2(°)/h,大幅度提高了陀螺的精度性能.
光纤陀螺;AR模型;随机误差;陀螺漂移;
光纤陀螺仪(FOG)是惯导系统的核心部件,它的性能在很大程度上决定了惯导系统的性能.光纤陀螺仪因具有全固态、可靠性高、动态范围广、重量轻等优点而得到广泛的应用,但是环境温度对陀螺仪的漂移影响较大,因此必须对光纤陀螺随温度变化的关系进行温度补偿,以减小温度变化的影响.
光纤陀螺为温度敏感器件,在温度变化过程中,不仅有陀螺仪随温度变化的趋势量,同时,还有与陀螺工作相关的各类误差信号即随机误差项.因此,对陀螺的温度建模,必须将陀螺的随机误差项剔除,得到陀螺随温度变化的真实趋势,建立陀螺的温度误差补偿模型,通过算法进行实时补偿.本文介绍如何通过自回归线性模型的方法建立陀螺的随机误差模型,从而得到陀螺随温度变化的真实信息,并利用该信息建立准确的陀螺随温度变化的模型,这可有效地提高光纤陀螺在全温度范围内精度指标.
1 ARMA模型
通常,在一定近似的程度上,任何广义平稳随机过程都可以用一适当阶数的ARMA(p,q)过程来描述.如果是xt零均值平稳序列,对任意t,满足线性差分方程[1]:

则称xt为ARMA(p,q)过程,或称式(1)为xtARMA(p,q)模型.其中ut~N(0,σ2),a1,…,ap为自回归系数;b1,…,bq为滑动平均系数.
这里,随机过程ARMA(p,q)模型中的驱动白噪声ut是模型固有组成部分,须将它与因光测误差或其他干扰引起的附加噪声严格区分.对于一个平稳过程,当用某种模型描述的逼近速度较慢时,改用其他模型可能获得更快地逼近速度.平稳ARMA(p,q)过程可以表示为AR(∞)或MA(∞)过程.
2 AR模型建模方法
自回归模型即AR模型,用符号AR(n)表示,所描述是一个均值为零、满足正态分布的平稳随机过程,最基本的建模方法是最小二乘建模法,该方法具有较高的精度.AR(n)模型的优点是:建模简单,计算迅速,预测容易,参数易于估计[1].
设有一平稳、正态、零均值时间序列为:{xk},k=1,2,…,N,则它的AR(n)模型有如下形式

式(2)中,xk为时间序列,φk为模型自回归系数,ak为残差;n为AR(n)模型阶次数;N为时间序列长度.
式(2)表示时间序列{xk}在k时刻的取值,xk可以用这个时序在过去n个时刻的观察值xk-1,xk-2,…,xk-n来估计,其误差为ak.AR(n)模型实际上是一种输入为xk,输出为ak的滤波器.AR(n)模型最常用的建模方法是最小二乘法,设yk为已知零均值时序,残差ak为满足正态分布的白噪声,它是理论值与实测值之差,即

其中,xk为实测值,yk为理论值,最小二乘法条件,即误差平方和为最小,写成矩阵:
3.4 访视者交流增强自我护理信心 通过护理人员组织访视者交流会,护士可以定时、主动、深入与患者沟通,了解其心理动态,建立信任可靠的护患关系,帮助他们正确对待造口带来的生活改变,能给予患者情感方面的支持,消除患者心理障碍,保持稳定的情绪,增强其求生存的能力和信心。患者之间的交流也使患者有了参加工作和社会交往的主动性,消除了患者的孤独感,同时也提供了更多的获取相关知识的机会,提供了能够相互交流造口护理及生活经验的平台,更好地促进造口患者身心健康。同时鼓励患者参加知识讲座活动,使其逐渐适应社会,融入社会,并能正确对待自己,以乐观的心态对待社会生活和社会工作[10]。


式(5)中,

由此,得状态方程

其中vk为动态误差.
设wk为AR模型的估计误差,则有

3 基于AR模型的光纤陀螺建模
光纤陀螺随机误差模型可采用自回归模型AR(n)模型来描述,它的零偏数据是有序的随机信号,其处理方法可以采用时序分析的方法,即按照统计理论,利用陀螺的输出信号,采用一定的方法,建立一个能反映系统运行状态的参数模型,称为光纤陀螺的时序模型.AR模型的阶数越高,其模型误差越小.通过比较,AR(2)模明显优于AR(1)模型,AR(3)模型与AR(2)模型之间的精度差别不很明显,且计算量较大.
3.1 建模前数据处理
在对光纤陀螺漂移数据的分析中,首先在分析陀螺漂移数据基础上采用滤波的方法消除确定频率分量的噪声,并结合温度对陀螺漂移的影响,须先去除趋势项,并建立陀螺的自回归参数模型.图1是某一中等精度光纤陀螺在一定温度变化条件下输出数据按一定时间平滑的结果,全温范围随机误差在2(°)/h以上,光纤陀螺的漂移能量不会集中在某个频率段,而是均匀地分布在频率轴上,说明陀螺漂移信号接近于白噪声,图2是将平滑后的结果进行剔除趋势项处理,图3是将剔除趋势项的结果进行平稳化处理,得到漂移数据的平稳时间序列[2].

图1 光纤陀螺输出平滑后结果

图2 剔除趋势项后输出结果

图3 光纤陀螺输出平稳时间序列图
3.2 AR模型参数的确立
将得到的平稳时间序列,建立常见的AR模型.由于光纤陀螺AR阶次不超过3次,固有AR(1),AR(2),AR(3)等三种模型.对模型的适用性检验通常采用FPC准则和AIC准则[3-4].
FPC准则由赤池弘治于1969年提出,意为最终预测误差准则,该准则适用AR模型的适用性检验.AIC准则由赤池弘治于1973年提出,意为信息准则.这一准则从提取出观测时序中的最大信息量除法,适用于ARMA(包括AR,MA)模型的检验.从原理上将,FPC和AIC在AR模型检验方法一样,检验的效果和结果相同.因此,本文仅采用FPC检验法对该模型的适应阶次进行检验,表1为AR(1)、AR(2)、AR(3)和AR(4)的模型参数和适应性检验参数.
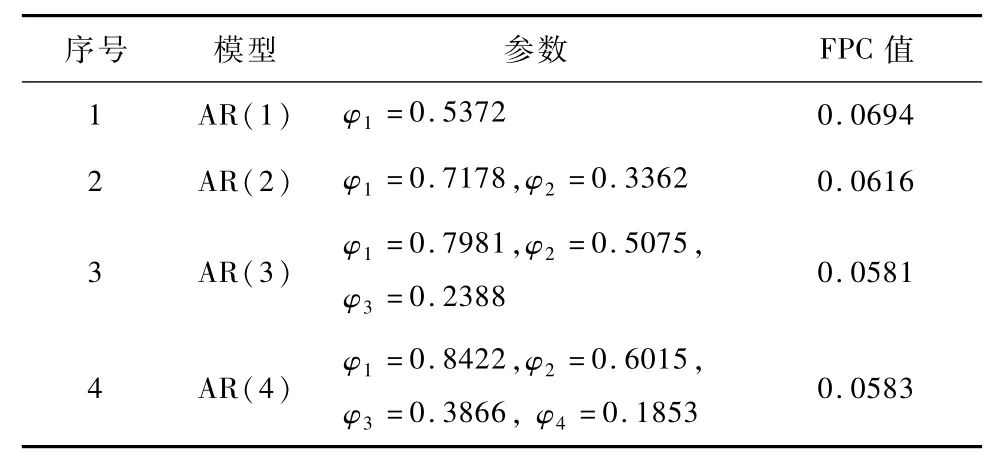
表1 模型参数及适应性检验参数
可以看出,选择AR(3)模型比较适应该型陀螺[5].对陀螺输出的平稳时间序列建立AR(3)模型,结果如图4所示,可看出,通过采用AR模型对随机误差进行建模,能比较真实模拟陀螺输出的随机误差,从而得到陀螺输出的有效信息.

图4 随机误差模型建立图
4 温度建模验证
利用AR(3)模型对光纤陀螺的漂移数据建立的误差模型,可得到光纤陀螺随温度变化的输出变化项(zt),将光纤陀螺输出(yt)减去陀螺随机误差项(xt),计算公式见式(9):则陀螺输出的真实信息如图5所示[6-7].

图5 陀螺输出随机漂移模型建立图

图6对光纤陀螺随温度变化的输出真实趋势项的建模情况.

图6 光纤陀螺温度趋势项
通过AR建模和温度趋势项补偿后的陀螺输出噪声如图7所示.
利用AR建模和温度趋势项补偿的方法,能将陀螺的误差在-20℃~50℃范围内补偿在0.2(°)/h,大幅度提高了陀螺的精度.
5 结 论
在温度变化过程中,光纤陀螺的漂移噪声不仅有随温度变化的趋势量,还有线路噪声和其他不确定的环境因素引擎的各类误差信号.通过对光纤陀螺输出信号的特性分析,并结合AR模型建模方法,建立了光纤陀螺的AR(3)模型,在此基础上进行了温度建模,仿真结果表明,该方法可以有效地提高陀螺性能.

图7 建模补偿后陀螺输出噪声
[1] 陈涛,王新龙,杜宇.基于AR模型的光纤陀螺建模方法研究[J].鱼雷技术,2005,9(3):25-27
[2] 柳贵福,邢艳丽,张树侠.光纤陀螺零偏稳定性的数据建模方法研究[J].中国惯性技术学报,2001,9(3):48-52
[3] M iao L J,Zhang F H,Sheng J,et al.Data analysis and modeling of fiber optic gyroscope drift[J].Journal of Beijing Institute of Technology,2002,11(1):50-55
[4] Sanders G A.Progress in high performance fiber optic gyroscopes[C].The 12thInternation Conference on Optical Fiber Sensors.USA Virgina,1997,116-120
[5] Blake J.Random noise in PM and depolarized fiber gyros[C].The 12thInternation Conference on Optical Fiber Senseors.USA Virgina,1997,121-125
[6] 王妍,张春熹,刘镇平.闭环光纤陀螺数字控制器的设计与仿真[J].光电工程,2004,31(s1):8-110
[7] 金靖,宋凝芳,李立京.干涉型光纤陀螺温度漂移建模与实时补偿[J].航空学报,2007,11(6),1449-1453
Modeling Method of Fiber Optic Gyro Based on AR Model
ZHOU Yi1,LIYong1,ZHANG Feng2
(1.Beijing Institute of Control Engineering,Beijing 100190,China;2.Beijing Aerospace Times Optical electronic Technology CO.,Ltd.Beijing 100854,China)
Aimed at the characteristic of general time-sequence model of Fiber Optic Gyroscope(FOG)random error,the random error of FOG is analyzed by using the AR model in the time sequence method and dealt with by using least squares method.Moreover,The model of FOG drift with temperature can be described by using mathematical algorithms if the random error can be eliminated.The output of FOG can be compensated by using this method.The simulation shows that the method is effective and sensitive to detect fault,and the accuracy can be improved to a great extent.
fiber optic gyro;AR model;random error;optic gyro drift;
U666.1
A
1674-1579(2011)05-0055-04
10.3969/j.issn.1674-1579.2011.05.012
2011-03-12
周 益(1982—),男,湖南人,工程师,研究方向为宇航用惯性姿态敏感器设计(e-mail:anyonezhou@126.com).
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
家庭影院技术(2020年1期)2020-06-24
小学生学习指导(低年级)(2019年10期)2019-10-16
劳动保护(2019年3期)2019-05-16
家庭影院技术(2019年4期)2019-04-17
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
家庭影院技术(2018年9期)2018-11-02
快乐语文(2018年36期)2018-03-12
电子制作(2017年13期)2017-12-15