基于ZigBee的定位系统环境参数的探讨
2011-11-20 07:40:20付军安
长江大学学报(自科版) 2011年10期
付军安
(成都理工大学信息科学与技术学院,四川 成都 610059)
卢涵宇
(成都理工大学信息科学与技术学院,四川 成都 610059 贵州大学计算机与信息工程系,贵州 贵阳 550003)
王合闯,王华军
(成都理工大学信息科学与技术学院,四川 成都 610059)
基于ZigBee的定位系统环境参数的探讨
付军安
(成都理工大学信息科学与技术学院,四川 成都 610059)
卢涵宇
(成都理工大学信息科学与技术学院,四川 成都 610059 贵州大学计算机与信息工程系,贵州 贵阳 550003)
王合闯,王华军
(成都理工大学信息科学与技术学院,四川 成都 610059)
为了解定位系统环境参数对定位精度的影响,对定位原理进行了研究,具体分析了室内定位系统的A、N值。测试试验表明,当A值取39、N值取27时,室内定位系统的定位精度在1~2m之内,定位效果比较理想。
ZigBee;CC2431;定位系统; RSSI
ZigBee无线通信技术具有定位精度高、成本较低等特点,以该技术为基础发展起来的各种定位系统具有良好的发展前景。通过对室内定位通信技术的研究发现,该技术应用于小型的室内环境定位效果良好,定位精度相对较高,相关的研究方法和结论可以为开发大型的定位系统如地下矿井人员定位系统提供决策性依据[1-4]。目前,很多定位系统的设计都是基于算法的改进和硬件的更新,忽视了具体环境的影响。为此,笔者对基于ZigBee的定位系统环境参数进行了探讨。
1 ZigBee无线通信技术
ZigBee技术是一种新兴的短距离、低速率无线网络技术[5]。ZigBee工作在国际免授权的2.4GHz频段上,具有250kbps 的最高数据传输率。在ZigBee网络中存在3种逻辑设备类型,即协调器、路由器和终端设备。ZigBee网络由一个协调器以及多个路由器和终端设备组成。
1.1ZigBee协议栈
ZigBee协议栈的基础是IEEE 802.15.4,IEEE 802.15.4是IEEE无线个人区域网工作组的一项标准,但其仅能处理低级物理层(PHY)和媒体访问控制层(MAC)。因此,Zigbee联盟扩展了IEEE,对其网络层(NWK)和应用层(API)进行了标准化。
1.2ZigBee的特点
ZigBee的特点具体表现在如下几方面:①研发成本低。通过大幅简化协议降低了对通信控制器的要求。②功耗低。低耗电待机模式下非常节电。③容量高。采用星状、网状等网络结构,对网络节点进行层层管理。④通信时延短。时延都在15~30ms之间。⑤可靠性高。3级安全模式确定其安全属性。
2 室内定位系统环境参数的研究
2.1定位原理
CC2431是一个ZigBee片上系统,其满足以ZigBee为基础的2.4GHz(该频段免费) ISM(Industrial Scientific Medical,工业科学医学)频段应用及对低成本、低功耗的要求。在常用的定位算法中,定位节点(终端设备)选用CC2431,参考节点(路由器)和网关(协调器)都选用CC2430,CC2430和CC2431内部逻辑结构相似,CC2430只比CC2431少一个定位引擎[1]。
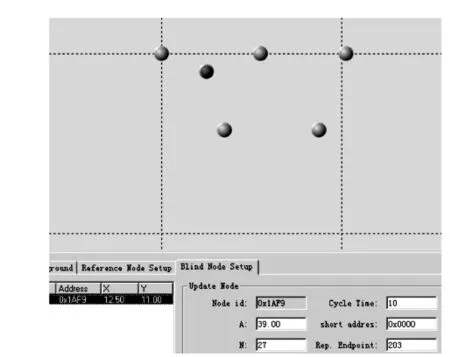
图1 节点在上位机中的分布
Signal Strength Indicator简称RSSI),RSSI的值随着距离的增加而减小。在CC2431组成的无线定位网络中,包括参考节点、定位节点以及网关3部分。网关的作用相当于ZigBee的协调器,负责整个定位无线网络服务、协调。参考节点是一个安置在已知位置的动态结点,其物理位置是固定不变的。定位节点是一个由CC2431构成的结点,其位置可以随时变化,具体位置由CC2431的定位引擎通过接受参考节点的RSSI值经过定位算法计算而得到。在CC2431定位引擎定位操作过程中,定位节点会首先读取距离自己最近的8个参考节点的坐标(X、Y)值,然后再读取其他标准参数,即A值和N值。A值为离发射节点(CC2430/CC2431)1m远的RSSI绝对值,N值为离发射节点每增加1m衰减的RSSI绝对值,A、N值会随环境的变化而变化。将得到的定位节点位置坐标(X,Y)值发送给网关传到后台的上位机实时监控软件上,利用上位机软件对位置进行实时监控。节点在上位机中的分布如图1所示,其中深色点为参考节点,浅色点为定位节点。
2.2室内定位系统A、N值分析
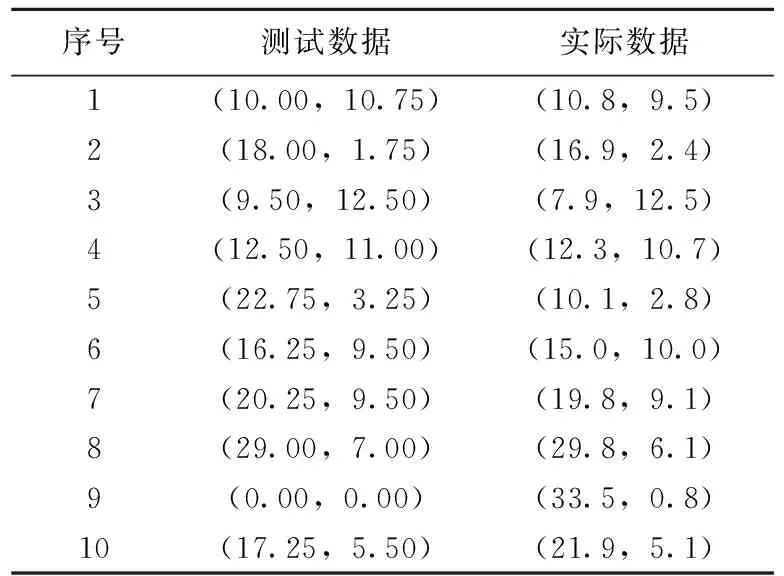
表1 相关试验数据
测试试验的运行环境为IAR Embedded WorkBench(EW8051)集成开发环境 7.20H版本,包含Z-Stack v1.4.2协议栈、SmartRF Flash Programmer工具软件和Genneral Packet Sniffer 协议分析软件。首先选用TI公司的2Z-Location_Engine 上位机定位软件,在测试区域为64m×64m的操作区,选取5个参考节点和1个定位节点,根据需要调整参考节点摆放的位置,而摆放的位置发生变化时相应的坐标也应随之改变。改变A、N的值,定位精度会有所不同,经过反复尝试,得出A值取39、N值取27时,精度较高。试验相关数据如表1所示。
从表1可以看出,第5组和第9组数据中测试数据和实际数据的X值相差过大,参考性不大。第4、7、8组测试数据和实际数据的X值和Y值偏差都在1m之内,效果比较理想。第2、3、6组的精度也比较高,其X值偏差都在1.6m以内,Y值偏差也都在1m之内。另外,第1组测试数据和实际数据的X值偏差在1m以内,Y值偏差超过了1m,而第10组测试数据和实际数据的Y值偏差在1m之内,X值偏差超过了3m,但对整体数据没有太大的影响,仍可认为是有效数据。因此,当A值取39、N值取27时,室内定位系统的定位精度在1~2m之内,定位效果比较理想。
为了更好的探讨相关的定位环境,笔者编写了一个上位机软件,该软件的界面环境为模拟地下矿井。当把参考节点的实际位置坐标事先设定在地下矿井中的某个矿道两侧时,得出的定位节点位置坐标会显示出来。通过模拟发现,当A值取39、N值取27时, CC2431定位节点朝某个方向直线移动时,监控界面中的“矿工”在矿井通道里比较平稳的移动,路线并没有出现太大的跳跃和波折(见图2),从而进一步说明在室内环境下,通过测试试验确定的A、N值是合理的。
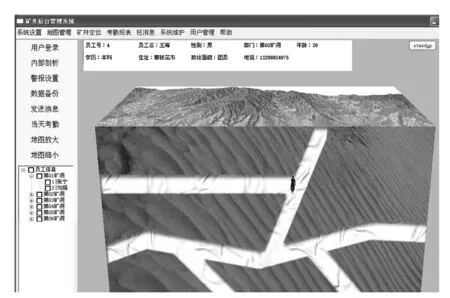
图2 上位机监控界面
3 结 语
应用ZigBee技术可实现室内定位,以该技术为基础的定位系统对环境的依赖性比较强,要提高定位精度,在总体设计时应考虑环境因素的影响。通过测试试验,具体分析了室内定位系统的环境参数A、N值。结果表明,当A值取39、N值取27时,室内定位系统的定位精度在1~2m之内,定位效果比较理想。另外,地下停车场和大型矿井井下人员的定位等可以该系统为参考,通过对环境参数进行适当调整,也可以获得更好的定位精度。
[1]耿晓立,邱选兵,魏计林.基于ZigBee技术的井下人员定位系统的研究[J].太原科技,2008(1):52-55.
[2]庄昆,孙喆.基于RFID 技术煤矿井下人员定位系统研究[J].山东煤炭科技,2009(4):87-89.
[3]李伟, 崔建明.基于ZigBee和GIS 的井下人员定位系统的设计[J].工矿自动化,2010(2):67-69.
[4]龚江涛,陈金鹰,方根平.Zigbee技术特点及其应用[J].物探化探计算技术,2007,5:382-385.
[5]赵妍,岳炳良,高大伟.Zigbee 无线解决方案网络层研究[J].计算机测量与控制,2007,15 (5):689-691.
[6]陈真,汪小燕,王钰.智能网络关爱系统的设计与实现[J].微电子学与计算机,2010,27(9):144-146.
[7]刘洋,杨洁明.基于CC2431 的井下人员定位方法研究[J].煤矿机械,2010,31(6):49-51.
[8]钟新跃,谢完成.无线传感器网络在煤矿环境监测中的应用设计[J].煤炭技术,2009,28(9):102-103.
[9]王春,华钢,朱艾春,等.煤矿井下人员定位系统上位机软件的设计与实现[J].煤矿安全,2010(8):64-66.
[编辑] 李启栋
10.3969/j.issn.1673-1409.2011.04.028
TP391
A
1673-1409(2011)04-0086-03
猜你喜欢
中国机械工程(2022年18期)2022-10-08 03:33:40
山西大同大学学报(自然科学版)(2022年1期)2022-03-17 05:56:40
黑龙江工业学院学报(综合版)(2020年5期)2020-07-29 09:13:56
中学数学研究(江西)(2020年7期)2020-07-22 06:34:40
自动化学报(2019年12期)2020-01-19 05:18:14
中国机械工程(2019年19期)2019-10-28 02:35:28
中国机械工程(2019年11期)2019-06-13 13:07:22
电子制作(2019年7期)2019-04-25 13:17:10
中国机械工程(2019年4期)2019-03-06 05:21:06
电子测试(2018年4期)2018-05-09 07:27:32