
基于双差GPS Kalman滤波的方法实时动态监测水汽变化
2011-11-13 08:05蒋光伟张秀霞
测绘工程 2011年6期
蒋光伟,张秀霞
(1.国家测绘局大地测量数据处理中心,陕西西安 710054;2.兰州理工大学土木工程学院,甘肃兰州 730050)
基于双差GPS Kalman滤波的方法实时动态监测水汽变化
蒋光伟1,张秀霞2
(1.国家测绘局大地测量数据处理中心,陕西西安 710054;2.兰州理工大学土木工程学院,甘肃兰州 730050)
基于双差模型的地基GPS反演水汽法通常滞后时间一般为1~2 h,而基于非差精密单点定位技术,由于目前无法解决卫星钟差问题,基本也是事后处理模式,且通常反演的水汽时间分辨率较低。研究基于双差GPS卡尔曼滤波的方法实时动态监测水汽变化,采用西安地区地面沉降监测网的数据并利用双差网解的方法和精密单点定位程序,验证了该算法的有效性。
GPS;单历元;动态跟踪;天顶延迟
目前,获取大气水汽的手段如水汽辐射计、航行器、气象卫星等在时空分辨率上均具有一定的局限性,而近几年迅速发展起来的地基GPS遥感水汽技术成为探测水汽的有效补充。基于双差模型的地基GPS获取水汽的手段通常是近实时的,日本已实现CORS网单历元实时形变监测和网络RTK实时大气科学研究,而国内在实时水汽方面还不是很成熟,通常滞后时间为0.5~1 h,不能满足实时水汽的需要。单历元算法:精密单点定位(PPP)虽可以实现单历元实时监测大气变化,但是,目前,精密卫星钟差实时性尚未解决,因此,其应用还有一定的局限性。
鉴于此,本文研究了基于双差GPS Kalman滤波实时动态监测对流层水汽的方法。该算法解算模型与常规双差模型类似,但该算法是基于单历元解算,其滞后时间只有几秒,较双差网解方法更能反应大气瞬时变化。另外,相比精密单点定位(PPP)反演大气法,新算法可以大大减弱星历误差和其它共性误差的影响,实现对大气水气变化的实时动态跟踪。同时,利用TRACK模块验证单历元双差模型用于实时反演水汽变化的可行性并将其与精密单点定位程序获取的大气延迟对比,得出一些分析和结论。
TRACK是GAMIT的一个动态定位模块,采用载波相位观测值差分进行相对定位,获取移动站的运动轨迹。
1 基于单历元算法的双差卡尔曼滤波模型
1.1 GPS双差模型
利用GPS相位观测数据,可以准确求定出GPS信号在大气传播过程中的大气延迟值,GPS载波观测方程

式中:λ为波长,φ0为初始相位,ρ为实际距离,tr为传播时间,ρatm为对流层延迟,ρion为电离层延迟,Δρ=ρsite1-ρsite2,ρatm为对流层延迟,Zd为天顶对流层干延迟,Zw为天顶对流层湿延迟,md为干映射函数,mw为湿映射函数。
将对流层模型式(2)带入到式(1)后,线性化双差方程式(3)得观测方程

式中:Zt为双差观测向量,Ht为参数的测量矩阵,Vt为观测噪声残差,Xt为估计参数。
1.2 卡尔曼滤波模型
模糊度固定后,则单个历元计算时采用卡尔曼滤波求解。

Xt为估计参数矩阵,Pt为站点坐标参数,Φt,t-1为第t-1到t历元状态转移矩阵,Δδt为接受机钟和卫星钟差的补偿,c为光速,wt-1为第t-1到t历元的随机扰动矩阵,τt-1为参数Xt与wt-1的相关关系矩阵。
基于上述原理,首先根据观测数据的若干历元,采用宽相相位减窄相伪距(Melbourne-Wübbena)组合和无几何影响(Geometry-Free)组合获得的可信的模糊度初始解,构建相应的模糊度搜索空间。采用最优模糊度和次优模糊度解对应的相位残差比与马德函数反余弦值之比做为判断条件,进行模糊度的搜索检验,确定整周模糊度的值。然后将整周模糊度值回带到方程中,采用Kalman滤波算法解算方程则可以实现实时单历元反演各个单站的天顶延迟参数。
因此,本次试验中的例子采用2008-07-06(年积日188 d)西安地面沉降地裂缝监测网的3个CORS监测点(见图1),基准站为XI00,2个流动站为XA00、LT00和其他监测点24 h数据,软件采用国际知名的高精度双差软件GAMIT,计算采取4个网外远距离辅助站,以获取绝对大气延迟值;并利用TRACK单历元跟踪模块分析大气延迟的精度及其变化是否满足和符合实时大气变化的需要,同时将其获取的单历元大气延迟值与精密单点定位(PPP)计算的大气延迟值进行比较,其中PPP和TRACK主要的设置参数如表1和表2所示。
2 验证单历元双差模型反演大气的可行性和实时性
2.1 星历误差的影响
大气的监测对轨道精度要求较高,而基于双差模型的方法大大削弱了卫星星历误差的影响。通常采用下式估计星历误差对基线的影响:

大气可降水量误差Δpwv与基线向量误差d B,存在如下关系:
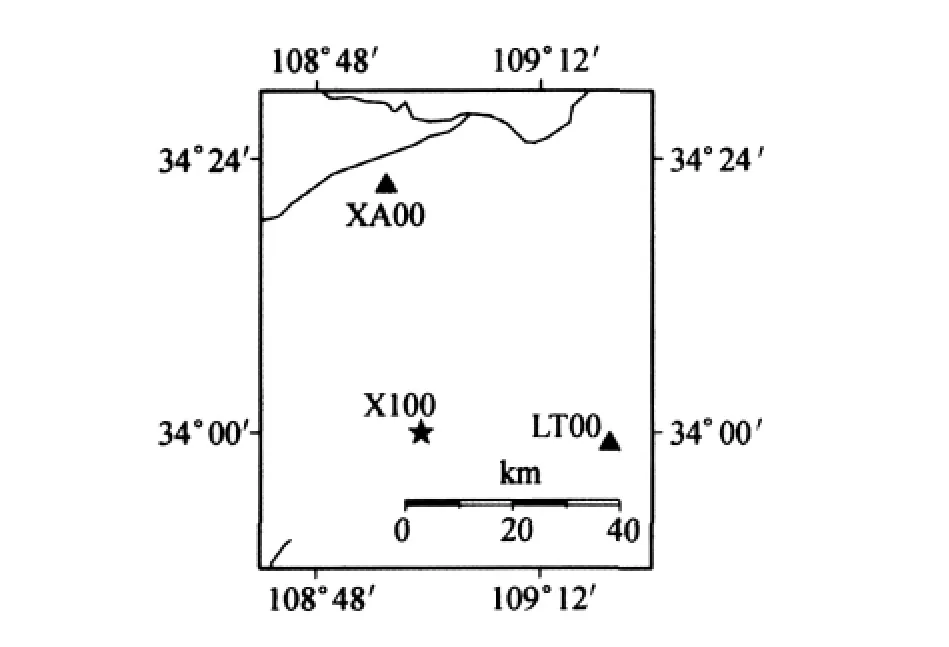
图1 基准站和流动站点位图

目前,IGS的超快速产品IGU(IGS Ultra rapid products)提供48 h轨道,其前24 h是利用实际观测值确定的轨道,后24 h是预报的轨道,IGU轨道1 d发布4次,其精度约为20 cm;IGS的最终轨道,滞后时间约为14 d,其精度在5 cm。
西安距离网点间的平均距离20 km,依据式(6)、式(7),Δpwv<<1 mm,IGS最终轨道与预报轨道满足实时反演大气变化精度的要求。
同时,本文基于双差模型利用TRACK模块对精密轨道和预报轨道反演天顶延迟影响进行对比,预报轨道选取了UTC00时刻的精密星历。图2上图:XA00,图2下图:LT00点,使用TRACK模块,分析精密星历和预报星历反演天顶延迟的影响。

图2 TRACK(IGS)、TRACK(IGU)大气延迟对比
从图2可以看出基于双差模型kalman滤波的方法使用预报星历(IGU)和精密星历(IGS),点LT00、XA00二者相距40 km,2种星历计算的大气延迟值ZTD互差最大0.05 mm,总体趋势上符合的很好,因此,基于单历元双差Kalman滤波模型,使用预报星历实现实时反演大气延迟是可行的。
2.2 大气延迟精度估计
目前,要获取1~2 mm的PWV精度,则至少需要保证天顶延迟的精度要高于6 mm,而本次试验采取的预报星历从图3点XA00可以看出,天顶延迟的平均精度是优于6 mm的,除去开始时的历元,这是因为:TRACK在开始计算时,首先需要用一些历元确定整周模糊度的初始值。

图3 大气延迟值精度
2.3 大气延迟值的比较
首先由于GAMIT解算的ZTD是某一段的平均值,而TRACK获得是单历元解,因此,选取了TRACK每0.5 h历元反演的ZTD与GAMIT每0.5 h估计的ZTD进行了对比,同时与基于精密单点定位(PPP)算出每30 min的ZTD值进行比较。
其次由于0.5 h的时间尺度对于实时跟踪水汽变化来说,滞后时间较长,因此,为了验证基于双差GPS的卡尔曼滤波方法的实时性,将基于TRACK的单历元解与基于精密单点定位PPP,每5 min一次估计瞬时天顶总延迟的结果进行比较分析。
基于双差GPS卡尔曼滤波方法,从图4 TRACK解算的点XA00,LT00的大气延迟值与GAMIT解算的与PPP相比较,XA00趋势和大气延迟值都符和的较好,但是点LT00的大气延迟值与GAMIT计算的相比稍有差异,但是相对趋势是对的,分析认为是基准站的选取导致,因为基准站XI00距XA00 40 km,而距LT00 30 km,因此,XI00与LT00两地的大气变化不一样,而在计算时采取与基准站相同的策略。
基于双差GPS卡尔曼滤波方法,从图5得出在实时水汽变化趋势大小方面二者相差一个系统差,原因可能是:不同的原理采用的方法不同,同时,基于双差GPS的卡尔曼滤波方法,其不受卫星钟的影响,而基于非差精密单点定位则受卫星钟的影响。

图4 GAMIT、TRACK、PPP时间分辨率为30 min的ZTD比较
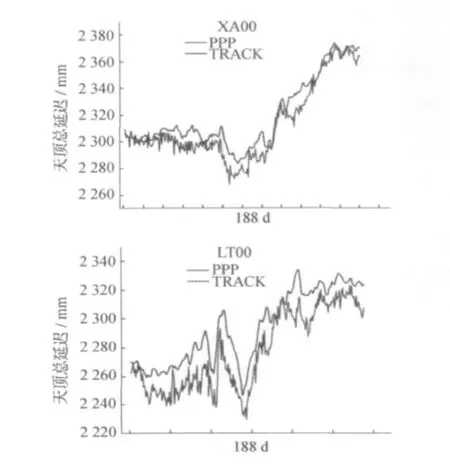
图5 TRACK与PPP时间分辨率为5 min ZTD比较
同时还可以得出基于双差Kalman滤波实时动态监测水汽变化的方法,其目前尚不能精确确定绝对水汽含量,基于参考站技术的方法对基准站的坐标初始值精度要求很高,因此,这种方法实时虽有一定的缺陷,但是随着省市CORS网的建设,这种方法具有一定的优越性,依据CORS网站点准确的地心三位坐标,则可以动态实时监测大气水汽的变化与分布规律。
基于双差网解软件(GAMIT、BERNESE),这种原理计算的是各个时段的平均值,而基于单历元算法可实时反映水汽的变化。因此,要做到水汽监测的实时性,最好选用单历元的方法。基于双差GPS的卡尔曼滤波方法可以实时动态监测大气变化,根据这些网点可以反应西安市实时大气的变化,本文采取了UTC 14:00和UTC 21:00的大气延迟值见图6,可以看出,西安市北边大气变化比较显著,这与MODIS气象卫星反应的一致(见图7),因此,基于双差GPS的卡尔曼滤波方法动态监测水汽可以为天气预报提供实时重要数据。
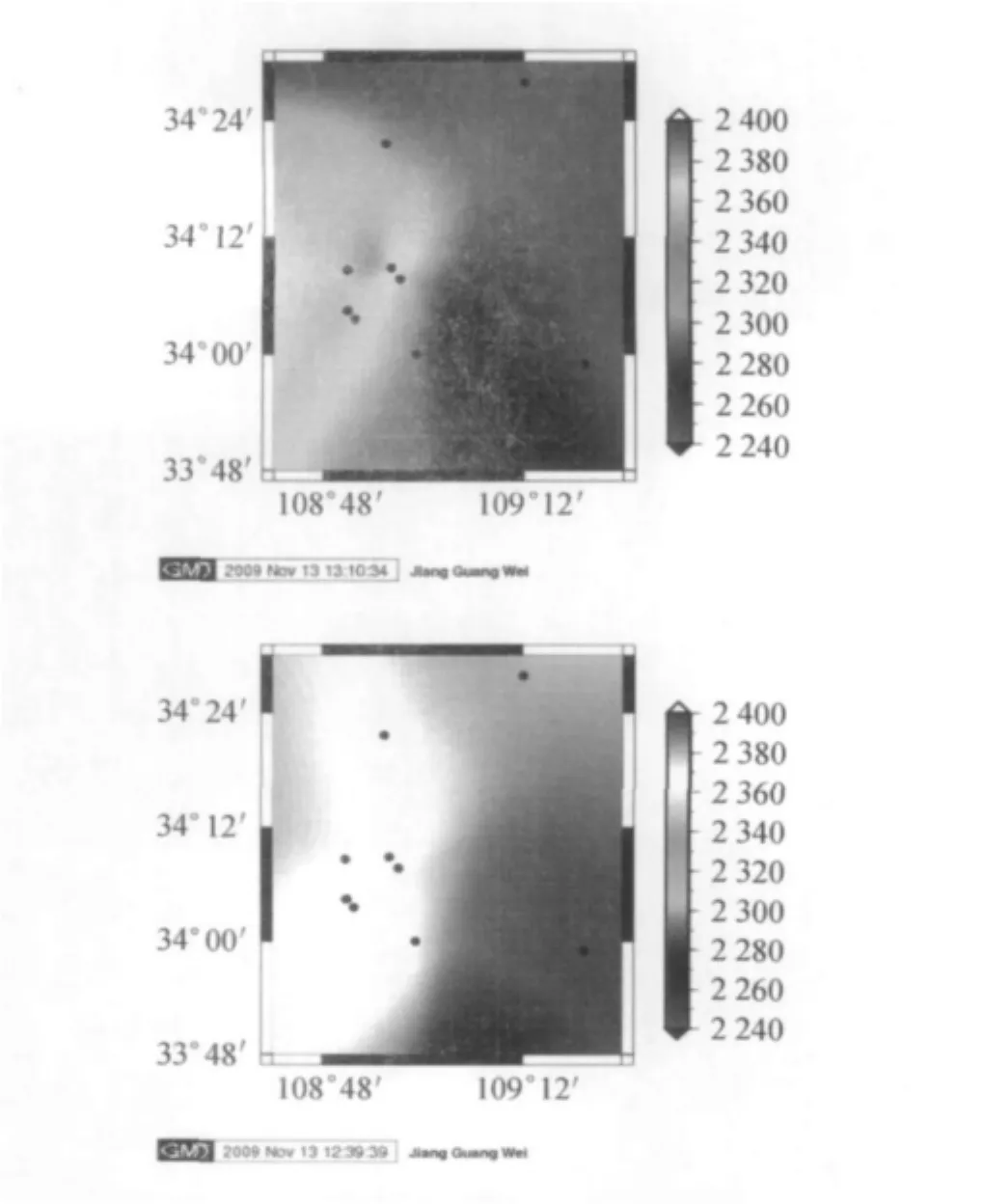
图6 大气延迟值分别在UTC 14:00和UTC 21:00分布
3 结 论
1)常规的方法基本是基于双差模型,且延迟时间一般为1~2 h,而基于非差的方法,暂时还无法解决卫星钟的问题,因此,应用还受到一定的限制。本文研究的基于双差GPS的Kalman滤波的方法则可以实现实时性,并利用TRACK模块验证了此方法是可行的。
2)基于双差GPS的Kalman滤波的方法,利用TRACK模块,反演的大气延迟值的精度和趋势与GAMIT的符合很好,且大气变化与MODIS影像获取的PWV分布变化趋势是一致的,因此,得出利用基于双差GPS的Kalman滤波的方法实时动态监测水汽变化研究是很有前景的。
3)基于双差GPS的Kalman滤波的方法,目前还存在一些问题,如大气绝对延迟值的获取,以及基准站的选择和网型的要求。
4)基于城市CORS网可以做区域实时水汽的研究,以及基于网络RTK技术的区域实时水汽系统的开发,为气象部门提供重要实时数据。

图7 MODIS影像在2008-07-06和2008-07-07的近实时PWV分布
[1]ROCKEN C,L MERVART.Testing a New Network RTK Software System[J].Journal of Global Positioning Systems 2004,3(1-2):218-225.
[2]宋淑丽,朱文耀.区域GPS网实时计算可降水量的若干问题[J].中国科学院上海天文台年刊,2004.
[3]苏小宁,孟国杰,胡丛玮,等.基于TRACK进行GPS单历元定位[J].大地测量与地球动力学,2009,29(3):100-103.
[4]邓自立.卡尔曼滤波与维纳滤波[M].哈尔滨:哈尔滨工业大学出版社,2001.
[5]张勤,李家权.GPS测量原理及应用[M].北京:科学出版社,2005.
[6]赵峰,戴连君,方宗义,等.GPS水汽检测中卫星轨道处理分析[J].南京气象学院学报,2007,30(1):140-143.
[7]胡丛玮,刘大杰.单历元确定GPS整周模糊度的分析[J].南京航空航天大学学报,2001,33(3):268-271.
[8]阳仁贵,欧吉坤,任超.GPS单历元载波相位整周模糊度的计算方法研究[J].长江科学院院报,2005,22(1):32-34.
[9]金慧华,白征东,过静珺,等.地基GPS反演水汽影响因素分析[J].测绘科学,2008,33(4):65-67.
Real-time dynamicly monitor the changes in water vapor based on double difference GPS-Kalman filtering approach
JIANG Guang-wei1,ZHANG Xiu-xia2
(1.Geodetic Data Processing Center,State Bureau of Surveying and Mapping,Xi’an 710054,China;2.College of Civil Engineering,Lanzhou University of Technology,Lanzhou 730050,China)
Based on double-difference model of ground-based GPS to invert water vapor,usually lag time is about 1-2 hours,while the difference based on non-difference precise point positioning technology,currently it can not resolve the problem of satellite clock and is processed by post-processing mode,and usually invert water vapor of low resolution.For this,the paper presents,based on double difference GPS-Kalman filtering method,real-time dynamic monitoring of water vapor changes,and uses land subsidence monitoring network in Xi'an data to validate the effectiveness of the algorithm.
GPS;the single epoch;TRACK;ZTD
P228
A
1006-7949(2011)06-0048-05
2010-07-26
国家自然科学基金资助项目(40802075;40902081)
蒋光伟(1985-),男,硕士.
[责任编辑:刘文霞]
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18
测绘学报(2022年5期)2022-05-31
大地测量与地球动力学(2022年1期)2022-01-11
中国惯性技术学报(2020年2期)2020-07-24
山东冶金(2019年5期)2019-11-16
测绘通报(2017年10期)2017-11-07
测绘学报(2017年4期)2017-05-12
山东工业技术(2016年15期)2016-12-01