
近海油田救生用滩涂车方案可行性论证
2011-10-26 07:16吴洪辉马廷雷魏忠华
中国科技信息 2011年10期
吴洪辉 马廷雷 魏忠华
中国石油集团海洋工程有限公司 100176
近海油田救生用滩涂车方案可行性论证
吴洪辉 马廷雷 魏忠华
中国石油集团海洋工程有限公司 100176
针对近海油田救生特点,依据车辆动力学与水动力学对滩涂车设计方案进行机动性能分析,并以救生时间为基准进行可行性分析,分析结果表明常驻平台的滩涂车用于救生具有一定优势。
滩涂车;救生;车辆动力学;水动力学
引言
海洋石油作业是世界公认的高风险行业,海上作业人员时刻面临着火灾爆炸、井喷失控、设施损毁等各种风险的威胁。建立装备完善的海上应急救援系统是事故发生后进行救援的有效手段,只有不断提高应急救援系统的应急能力,才能有效地减少人员伤亡和财产损失,防止事故的扩大。
但是,在滩海、浅海、近海沼泽地区进行应急救援工作还是一个难题。主要是因为这一地区受潮汐影响特别大,低潮时水特别浅,甚至露出海滩或沼泽,一般车辆无法进入;水深时虽然船舶可以进入,但受潮时的限制,没有足够的时间进行救援。受潮汐影响,在滩海区域内现有水上救生装置不能实现在任意时间内进行救援,必须能够满足水陆两栖的需要。但是,虽然目前水陆两栖装备有了比较先进的技术,可是仍然不能满足在火灾、烟雾等条件下实施救助工作。发生油气火灾爆炸时,因为有大量的烟雾,视线受到很大影响,直升机一般难以靠近,发生在北海的阿尔法平台爆炸案就是一个例子。
可在硬路面、滩涂路面、水上连续行驶的救生车辆将是一种有效的解决方案,本文针对一款两栖滩涂车辆进行机动性和救生的可行性论证。
初步方案为:车辆满载全重为6 t,长×宽×高为5.0m×2.7m×2.2m,动力舱前置,乘员舱地板较低,整车高度、重心都较低。舱体后部开有舱门,舱体两侧和前侧距地板1.2m高处开有观察窗。底盘尾部中央开有导流槽供螺旋桨导流。舱体采用合金钢,外部可披挂耐高温陶瓷,观察窗采用耐高温防弹玻璃。整车采用耐高温材料密封。结构图如图1所示。
1 陆上机动性能
1.1 陆上虚拟试验
基于多体动力学软件Recu rDyn,对初步方案车型进行虚拟试验[1,2],得到车辆动力因数、附着系数和阻力系数。虚拟试验中路面参数采用海调资料中获取的滩涂土质参数。
首先联合Matlab进行动力因数分析,如图2所示。
采用被牵引法测附着系数。
在滩涂路面上进行“被牵引试验”,实车试验的过程[3]是,由一牵引车通过自动记录力表牵引被试车辆,牵引车以低速等速行驶,行驶至试验地域,将被试车辆完全制动,当车辆开始滑移瞬间,记下力表读数就是车辆的附着力,则附着系数为:

式中:P为附着力(滑移瞬间力表读数),N;G为车重,N。
利用Recu rDyn进行虚拟试验。首先需要基于贝克模型建立虚拟试验场的滩涂地面,其中的土壤参数源于前期实车试验数据,而后利用前期构建的虚拟样机在该路面进行“被牵引试验”,试验过程中利用加载于车辆首部单向作用力代替牵引车。
采用逆向法求直驶阻力系数。
实车试验的过程[3]是,让被试车辆在试验地域低速稳定行驶,利用扭矩仪测得主动轮上的扭矩,除以主动轮半径就得到地面行驶阻力。

图1 方案布置图

图2 RecurDyn&Matlab联合仿真

式中:M为两个主动轮上的扭矩之和;r为主动轮半径。
则车辆的直驶阻力系数为:

式中:R为地面行驶阻力。
利用Recu rDyn进行虚拟试验。直接利用虚拟样机在虚拟滩涂地面上行驶即可,对主动轮赋予转速,反向求取扭矩即可。
2.2 快速性分析
无坡度的情况:
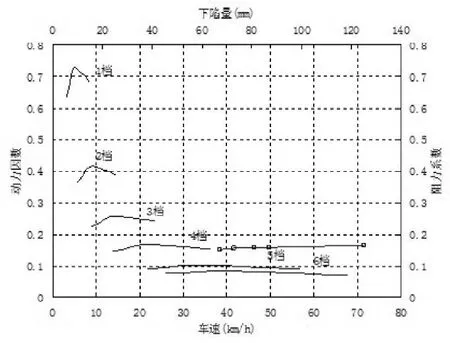
图3 无坡度快速性
当下陷量小于100mm时,车辆最高车速可达30km/h,当下陷量大于100mm时,车辆只能在1、2、3档下以小于25km/h的速度行驶。
有坡度的情况:
机电一体化技术在柴油机控制的应用过程中,必须要根据发动机排放和油耗之间的关系,对其进行优化和升级。目前,柴油机中所应用的电子节省能源液压泵体系,不仅能减少能源的消耗、控制冷风扇的转速,还可以使得柴油机的冷风扇随着温度的改变而对运转速度进行自行调节,并使得柴油机有门随着过载负荷的变化而进行变化。在很大程度上提升了柴油机的工作性能、工作效率等,满足了多种施工的需要。同时,这一技术的应用,还降低了能源消耗,实现了柴油机在应用中的节能减排需求。
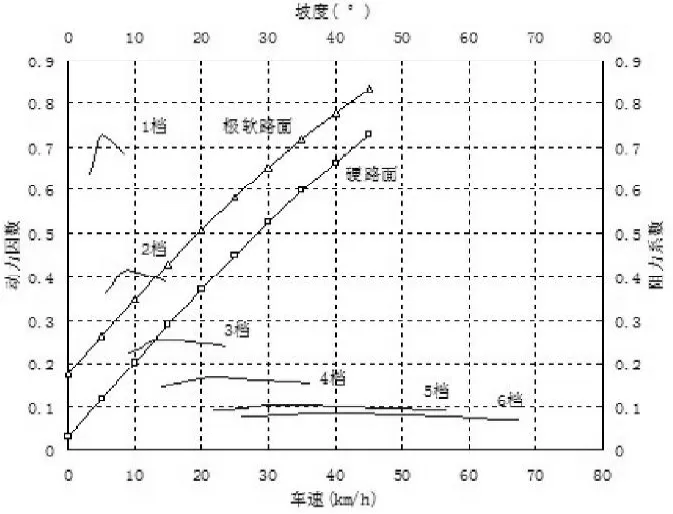
图4 坡上快速性
图中极软路面表示下陷量最大的滩涂。附着系数最大仅能达到0.36,因此有结论:对于软硬路面,车辆爬坡度在11度以上。
2 水上机动性能
由于车体形状复杂,很难用船舶水动力学的估算公式直接计算水上行驶阻力。因此采用计算流体动力学软件F luen t计算水上行驶阻力[4],而后利用船舶主机功率计算公式反推指定航速下所需主机功率。
对方案车型进行虚拟试验,得到水上航行阻力后,考虑推进器效率、车型效率、传动效率,利用公式(4)计算所需主机功率[5]。
式中:N0为主机功率;Nu为指定航速下,克服阻力的有用功率;η0为敞水效率,取0.4(浸水浅,效率低);ηH为车身效率,取0.85;ηr为相对旋转效率,取1.0;η0m为机械传动效率,取0.85。
计算可得主机功率曲线如图5所示。其中“深静水”表示海面平静,且水深5m以上的情况,“浅海浪”表示有轻微海浪且水深5m以下的情况。

图5 主机功率曲线
由于方案中设计发动机最大功率125kw,因此水上航速可保证高于11km/h。
3 救生可行性研究
3.1 救生过程
救生过程主要分为两个步骤:1、从平台进入到滩涂车;2、从滩涂车到守护船或陆地。按照有伤员和无伤员两种情况分析。
(2)从滩涂车到守护船:滩涂车需要通过滩涂驶向深水区,需要经过泥地行驶、水中着地行驶、水上行驶三种状态,或是水中着地行驶、水上行驶两种状态。在风浪小的情况下容易完成,在风浪大的情况下滩涂车会出现顿底现象,严重影响到滩涂车的安全。当靠到守护船上后可以比较容易的将人员转移到守护船上,当风浪比较大时,可以将滩涂车靠在被风的一侧。因此当风浪较小时适合往守护船处行驶。
(3)从滩涂车到陆地:滩涂车需要通过滩涂驶向陆地,一般需要经过泥地行驶、水中着地行驶两种状态。因为基本上没有水,所以没有浪的影响,滩涂车行驶起来比较平稳。无伤员情况,可以将人员转移到安全地带即可,可以不用上岸,这种情况相对比较容易,因为最软的地面在靠近岸边附近。如果有伤员,则必须将伤员运送上岸,转移到救护车上,这种情况就需要通过最软的地面。

图6 基本救生方式示意图
3.2 救生时间
对于常驻采油平台下的救生用滩涂车而言,比较救生时间可以分为两种:一是从滩涂车启动到将人员撤离平台驶入安全区域的时间,二是从滩涂车启动到将人员救助到守护船或陆地上的时间。
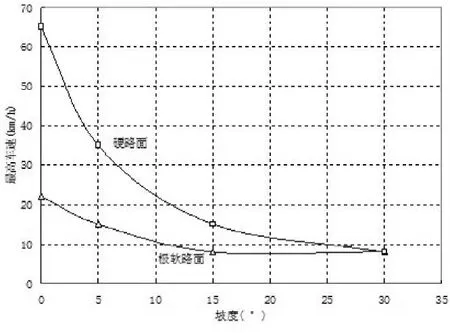
图7 最高车速随坡度变化

图8 最高车速随下陷量变化
(1)从滩涂车启动到将人员撤离平台驶入安全区域的时间
可用下式估算:

式中:
T——总时间;
T11——滩涂车启动时间,约3分钟;
T21——滩涂路面行驶时间,T2=L2/V2max,V2max可查最高车速随坡度变化曲线图7与最高车速随下陷量变化曲线图8获得,设滩涂路面长1km,查图估算行驶时间是3分钟;
T31——水上行驶时间,T3=L3/V3max,由于海况变化较快V3max可取11km/h,设水上行驶距离为2km,则行驶时间是11分钟;
T41——人员从平台转运到滩涂车上的时间,分有伤员和无伤员及伤员的受伤程度,有伤员时约5分钟;
T51——滩涂车转向驶离时间,约3分钟。
由式(5)估算时间为25分钟。这比直升机从远距离空中实施救援(按救出10人计算)要快得多,是一个比较理想的时间,但实际情况会更加复杂。
(2)从滩涂车启动到将人员救助到守护船的时间可用下式估算

式中:
T——总时间;
T12——滩涂车启动时间,约3分钟;
T22——滩涂路面行驶时间,T2=L2/V2max,V2max可查最高车速随坡度变化曲线图7与最高车速随下陷量变化曲线图8获得,设滩涂路面长2km,查图估算行驶时间是6分钟;
T32——水上行驶时间,T3=L3/V3max,由于海况变化较快V3max可取11km/h,水上距离会加长水上行驶距离为4km,则行驶时间是22分钟;
T42——人员从平台转运到滩涂车上的时间,分有伤员和无伤员及伤员的受伤程度,有伤员时约5分钟;
T52——滩涂车转向驶离时间,约3分钟;
T62——人员从滩涂车转移到守护船上的时间,分有伤员和无伤员及伤员的受伤程度,有伤员时约5分钟。
由式(6)估算救助到守护船上的时间是44分钟。
(3)从滩涂车启动到将人员救助到陆地的时间

T——总时间;
T13——滩涂车启动时间,约3分钟;
T23——滩涂路面行驶时间,T2=L2/V2max,V2max可查最高车速随坡度变化曲线图7与最高车速随下陷量变化曲线图8获得,设滩涂路面长4km,查图估算行驶时间是12分钟;
T33——水上行驶时间,T3=L3/V3max,由于海况变化较快V3max可取11km/h,设水上行驶距离为2km,则行驶时间是11分钟;
T43——人员从平台转运到滩涂车上的时间,分有伤员和无伤员及伤员的受伤程度,有伤员时约5分钟;
T53——滩涂车转向驶离时间,3分钟;
T63——人员从滩涂车转移到陆地上的时间,分有伤员和无伤员及伤员的受伤程度,有伤员时约5分钟。
由式(6)估算救助到陆地的时间是39分钟。
4 结论
从以上分析可以看出,使用常驻采油平台的滩涂车进行救援,可以在较短的时间内从平台上将人员撤离。一次撤离的人员数量较直升机多,速度快,具有一定的优势。
[1]卢进军, 魏来生, 赵韬硕. 基于RecurDyn的滑转对履带车辆加速性能影响研究[J]. 系统仿真学报. 2007,3(3):139-143
[2]戴瑜, 刘少军. 履带车多刚体建模与仿真分析[J]. 计算机仿真.2009, 26(3):281-285
[3]汪明德, 赵毓芹, 祝嘉光. 坦克行驶原理[M]. 北京:国防工业出版社.1983:119-120
[4]王涛, 郭齐胜, 徐国英. 两栖车辆水上行驶流场的仿真[J]. 系统仿真学报. 2007, 19(22):5130-5132
[5]杨楚泉. 水陆两栖车辆原理与设计[M]. 北京: 国防工业出版社.2003:107-117
10.3969/j.issn.1001-8972.2011.10.112
猜你喜欢
儿童故事画报·自然探秘(2022年3期)2022-04-27
世界最新医学信息文摘(2021年29期)2021-01-10
青年文学家(2020年28期)2020-11-02
劳动保护(2019年7期)2019-11-25
少年文艺(2019年5期)2019-05-28
装备制造技术(2018年8期)2018-10-17
消费导刊(2018年10期)2018-08-20
灾害医学与救援(电子版)(2018年1期)2018-06-05
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
