
基于多传感器融合的无线感知状态监测*
2011-10-21 03:43曹秀岚米新磊田裕鹏周克印
传感技术学报 2011年12期
曹秀岚,吴 杰,米新磊,田裕鹏,周克印
(南京航空航天大学自动化学院,南京 210016)
现在人们对安全保障等的要求日益提高,特定情况下的自主状态监测受到越来越多的关注。良好的状态监测系统能使操作人员快速而准确地了解监控范围的情况,从而迅速做出正确的决策。
如今的监测系统多是针对某一量的单传感器监测,即使采用多传感器也仅是从多个侧面孤立地反映目标信息,因此在状态判别过程中准确率较低。且多数监测系统成本较高,受布线影响,在复杂环境中很难实现全方位的监测。
本文针对这些不足,对基于多传感器融合的无线感知检测方法进行研究。利用多传感器在性能上的差异与互补,综合来自无线传感网络中各个传感器的信息,利用融合方法进行数据分析,可以消除传统监测系统检测数据单一、可靠性不高的弊端,获取准确的状态估计;同时结合无线传感网络的优势,实现工作点可动态变化、全方位的实时监测[1]。从而使整个监测系统的有效性得到提高,同时具有成本低、灵活性高、可配置的优势。
1 多传感器信息融合技术
多传感器信息融合就是协调使用多个传感器,将来自不同传感器的信息进行综合处理,降低其不确定性,获得对物体或环境的一致性解释或描述的过程,实际上就是对人脑综合处理复杂问题的一种功能模拟[2-3]。常用的融合方法包括:贝叶斯估计、加权平均法、卡尔曼滤波、统计决策理论、经典推理法、D-S证据理论、模糊推理、神经网络等[2]。
由于传感器所提供的信息都具有一定程度的不确定性,信息融合的过程实质上就是一个非确定性推理与决策的过程。而D-S理论为不确定信息的合成提供了强有力的方法,这使得它在信息融合领域具有更广泛的应用。根据监测环境的复杂性和不确定性的特点,本文采用D-S理论方法来进行信息融合。
2 D-S证据理论
证据理论,也称D-S证据理论。该理论把概率论中的事件扩展成命题,把事件的集合扩展成命题的集合,并引入基本可信度分配函数、信度函数和似真度函数等概念,建立命题和集合之间的一一对应关系,从而把命题的不确定性问题转化为集合的不确定性问题,形成了不确定推理模型的一般框架,最终确立了处理不确定信息的D-S理论[4]。
2.1 基本理论[4-5]
设Θ为变量x的所有可能值的穷举集合,且Θ中的各元素是相互排斥的,则称 Θ为x的识别框架。
定义1设Θ为一识别框架,则函数m:2Θ→[0,1]在满足m(Φ)=0 且m(A)=1时,称m为框架Θ上的基本可信度分配,∀A⊂Θ,m(A)为A的基本可信度分配值。m(A)表示对命题A的信任程度。
要获得A的总信度,须将A的所有子集B的基本可信度分配值相加,可用信度函数表示。
定义2设m:2Θ→[0,1]是识别框架 Θ 的基本可信度分配,定义函数Bel:2Θ→[0,1]为

称该函数为Θ上的信度函数。从而可知Bel(φ)=0,Bel(Θ)=1(φ代表空集)。
定义3设Bel:2Θ→[0,1]是识别框架Θ上的信度函数。定义函数Pl:2Θ→[0,1]为

称Pl为Bel的似真度函数,Pl(A)表示不否定A的信任程度。
信度函数与似真度函数有如下关系:对所有的A⊆Θ,Pl(A)≥Bel(A)。[Bel(A),Pl(A)]表示命题A的不确定区间,也称为概率的上下限。
定义4若A为识别框架Θ的子集,且m(A)>0,则称A为信度函数Bel的焦元。
2.2 D-S理论组合规则
D-S理论给出了组合两个证据的规则,即Dempster合并规则。合并规则又称正交和规则,用⊕表示。设m1,m2是2Θ上的两个相互独立的基本可信度分配,则组合后的基本可信度分配:m=m1⊕m2。
设Bel1和Bel2是同一识别框架Θ上由两个独立的证据源导出的两个信度函数,m1和m2分别是其对应的基本可信度分配,焦元分别为A1,A2,…,An和B1,B2,…,Bm,设

利用Dempster合并规则,可以得到这两个证据共同作用下产生的基本可信度分配:
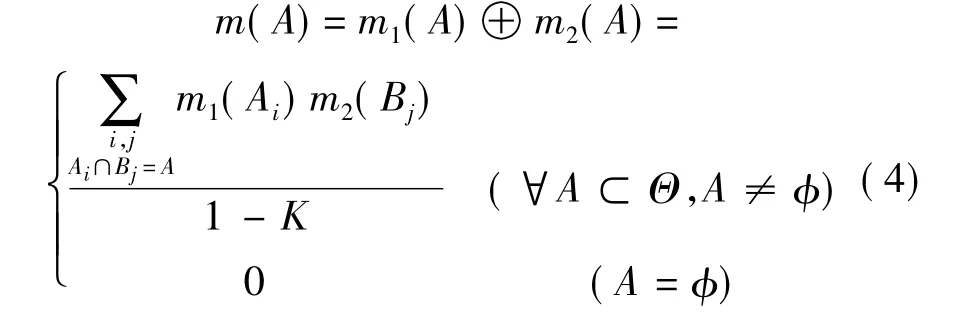
式中,若K≠1,则m确定为一个基本可信度分配;若K=1,则认为m1和m2矛盾,不能对其进行组合。
在多传感器系统数据融合中,对于多个证据的合成,Dempster合并规则同样适用。但是计算复杂度会随着证据源的增加成指数增长[3],这时可以利用Dempster合并规则的结合律来相对减少一些计算量,即重复运用式(4)对证据进行两两组合,以取代一次合成n个证据。设m1,m2,…,mn分别是Bel1,Bel2,…,Beln的基本信度分配,则融合后的基本可信度分配为:m=(((m1⊕m2)⊕m3)⊕…)⊕mn。
2.3 D-S理论的不足与改进
在D-S理论组合规则中,K是用于衡量证据之间冲突程度的系数。K值较小时,说明证据间的冲突较小,基本可信度能通过证据的积累向不确定性较小的命题集中;K值越大,证据间的冲突越大,数据融合结果越与事实不符;K=1时,D-S证据组合规则完全失效。
针对经典D-S理论在处理严重冲突的证据时存在的问题,有如下改进方法:把证据间的冲突度按各个证据的平均支持程度加权分配给冲突证据,将冲突弱化,达到暂时的协调,等下一条证据到来时可以继续融合下去,并得到比较合理的结果[6-7]。
其合成规则为:
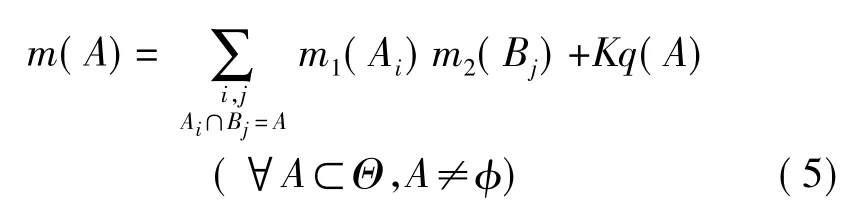
实际中可能存在各种证据冲突的情况,本文根据冲突系数K的大小来判断具体使用哪种方法。当K较小时,采用经典D-S方法;当K较大时,采用改进方法。这样可以起到互补的作用。下面给出了使用证据理论的流程,其中δ为判断证据冲突程度的阈值,本文取 δ=0.9。
(1)读入证据m1、m2;
(2)计算冲突系数K,判断证据是否冲突证据,如果是,即K>δ,则进行下一步,否则转(4);
(3)按改进的式(5)对冲突证据进行融合,然后转(5);
(4)按经典D-S融合规则即式(4)对证据进行融合;
(5)如果可以进行判定,则做出判决后退出;如果不能够进行判定,读入下一条证据,然后转(2)。
2.4 D-S理论决策规则
由证据理论组合证据后,如何得到最后的决策结果,是一个与应用密切相关的问题。在实际应用中没有统一的方法,必须具体问题具体分析。基于D-S证据理论的常用决策方法有以下几种[3]:
(1)基于信度函数的决策;
(2)基于基本可信度分配的决策;
(3)基于最小风险的决策。
本文采用基于基本可信度分配的决策方法来得到最后决策结果。设∃A1,A2⊂Θ,且满足

若有:
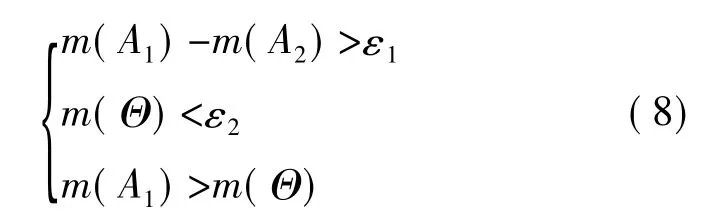
则A1为判决结果,ε1、ε2为预先设定的门限值。本文中,取 ε1=0.02,ε2=0.4。
3 应用实例
3.1 无线感知监测系统构成
无线感知状态监测系统主要由监控中心,网关节点和传感器节点等组成。传感器节点的构成如图1所示,根据监控环境的不同来具体布置这些节点,以达到全面监测,并将采集到的信息进行融合之后通过无线网络传送到网关节点。
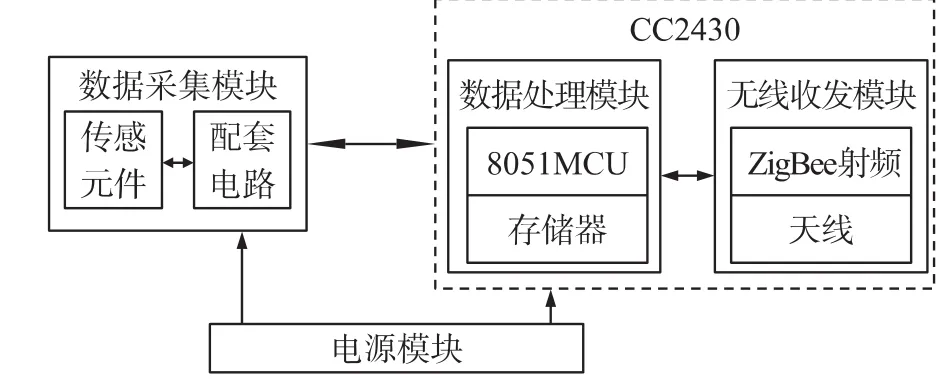
图1 传感器节点结构
网关节点的构成如图2所示,主要负责组网并将信息通过串口等方式上传到监控中心或通过GSM网络短信通知管理人员。监控中心主要负责对传送来的信息进行分析处理,从而得知监测环境的情况,并作出相应决策。
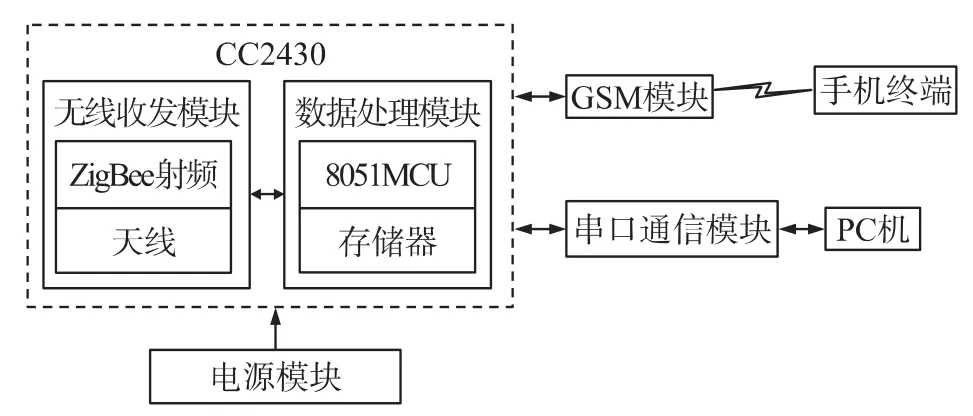
图2 网关节点结构
ZigBee作为短距离无线通信新秀,具有低成本、低功耗、结构简单、可靠性高等优点。这些优点使得ZigBee和无线传感网络完美地结合在一起,可以很好地实现系统中的无线通信及数据传输,并可以满足该系统经济实用,简单灵活的要求[8],本文将基于ZigBee的无线网络技术应用于状态监测系统。
3.2 信息融合总体流程
为了验证D-S方法在状态监测的信息融合中的有效性,以识别是否有人侵入监控范围为命题,利用D-S信息融合方法对其进行判断。
利用D-S证据理论对多传感器进行融合的基本过程如图3所示。在该系统中,集合了声音、热释电红外和压力三种传感器。这三种传感器分别对目标信息进行探测,然后对探测结果进行预处理,再赋予0到1之间的概率分配值,即基本可信度分配,这个值反映了对该判决的支持程度。然后在融合中心利用D-S融合规则融合各传感器的证据。最后按照本文规定的决策准则,得到最终决策结果。
3.3 基本可信度分配
如何合理确定基本可信度分配,一直是证据理论应用中的关键问题之一,这是一个与应用密切相关的问题,而且没有通用方法。基本可信度分配,是人们对目标假设的可信程度的一种判断,这种判断受各种因素的影响,不同的思路会构成不同的基本可信度分配[9]。模糊理论是处理不确定问题的基本数学工具,考虑到传感器对事件状态的确定都有一定的模糊性、不确定性,本文利用模糊理论来确定各类传感器的基本可信度分配。
不确定性推理是信息融合的基础,而模糊理论与D-S证据理论都具有较强的处理不确定信息的能力,将这两者相结合能够很好地处理模糊信息,提高数据融合结果的可靠性,已有不少学者对此进行了相关研究。文献[10]将证据理论与模糊理论和专家系统方法相结合进行目标识别,可以提高目标识别的可靠性,但是系统数据库和经验的积累对结果有着很大的影响,还需要不断修正和完善。文献[11]把目标和诱饵的辐射及运动特性用D-S证据结合起来,构成模糊集合,最后根据模糊判决进行目标识别,该方法能很好地把目标从诱饵中分离出来。目前研究最多的还是利用模糊集的隶属函数构造证据理论中的基本可信度分配函数,这有效解决了基本可信度分配的不易确定问题,实现了模糊理论和证据理论的有效结合,本文就是利用这种方法来确定基本可信度分配的。
模糊理论用来描述没有明确界限和概念的外延模糊的现象,并将这些不确定现象引入到数学运算中,与隶属函数建立对应关系,来描述那些介于0和1 的中间过渡过程[12]。
隶属函数是主观定义的一种函数。在理论上隶属函数描述了元素属于模糊集的强度。若隶属函数μA(x)接近1表示x属于A的程度高,若μA(x)接近0,表示x属于A的程度低。隶属函数的确定方法不唯一,文献[13-14]根据领域专家的经验来给出相应隶属度,这种方法容易受主观性和局限性的影响,文献[12]根据较复杂的高斯函数来确定,这种方法的准确性较高,但是算法比较复杂。本文综合前人的经验和各传感器的性能、算法的复杂性以及环境等因素,采用梯形函数来构造隶属函数。
设模糊集合A表示“有人”,模糊变量为x,一个周期内对信号的采集次数为N。
声音传感器和红外传感器输出的是开关信号,当检测到周围有声音或有人移动时输出高电平,因此将一个周期内采集的高电平的次数作为模糊变量x。这两者的隶属函数定义为:

其中,b、a分别为判断为“有人”的可能性的次数的上、下限,a、b的选取与传感器性能及外部环境因素有关,需对传感器进行多次测试以及联系实际工作环境来确定a、b的值。
压力传感器输出的是和压力有对应关系的电压模拟信号,经转换后可得到相应压力值,因此将一周期内采集到压力的平均值作为模糊变量x。则隶属函数定义为:
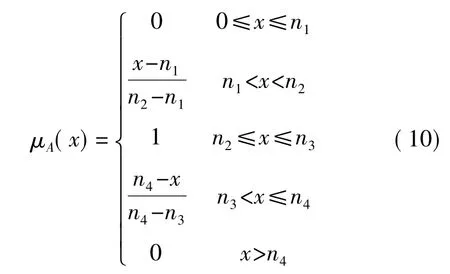
其中,n1为人体重的下限,n2~n3为正常体重的范围,n4为上限。这些值都是根据经验或权衡多次试验结果之后选取的。
3.4 实验结果及分析
定义识别框架{A,B,Θ},其中A表示有人,B表示没有人,Θ表示不能确定。设α表示模糊变量的不确定程度,α的选取与传感器自身性能和其所处环境等因素有关。则基本可信度分配如下[15]:
m(A)= μA(x)(1-α);m(B)=(1-μA(x))(1-α);m(Θ)=α。
传感器1代表声音传感器,传感器2代表红外传感器,传感器3代表压力传感器。它们的隶属函数分别为:
μ1,A(x)=0.6;μ2,A(x)=0.5;μ3,A(x)=0.9;
μ1,B(x)=0.4;μ2,B(x)=0.5;μ3,B(x)=0.1。
综合各传感器的性能与所处环境等因素,不确定程度 α1取0.1,α2取0.1,α3取0.05,则由三种传感器确定的基本可信度分配分别为:
m1(A)=0.54;m1(B)=0.36;m1(Θ)=0.1;
m2(A)=0.45;m2(B)=0.45;m2(Θ)=0.1;
m3(A)=0.855;m3(B)=0.095;m3(Θ)=0.05。
首先由Dempster组合方法对m1(·)和m2(·)进行组合,组合情况如表1所示。
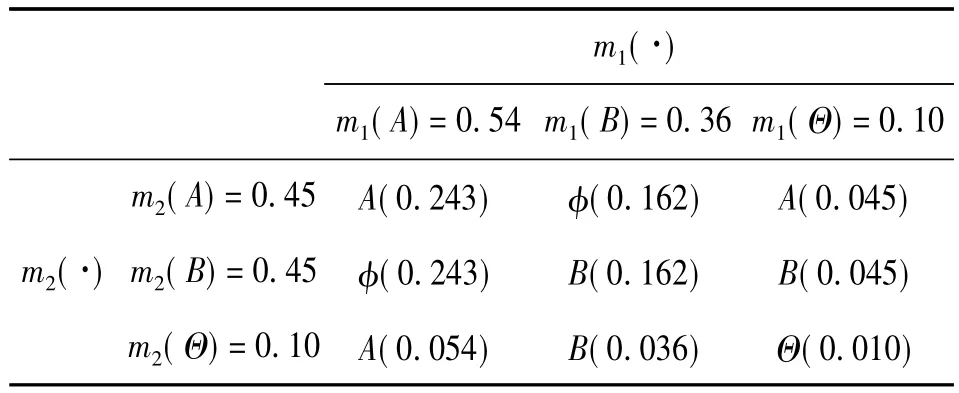
表1 m1(·)和 m2(·)组合情况
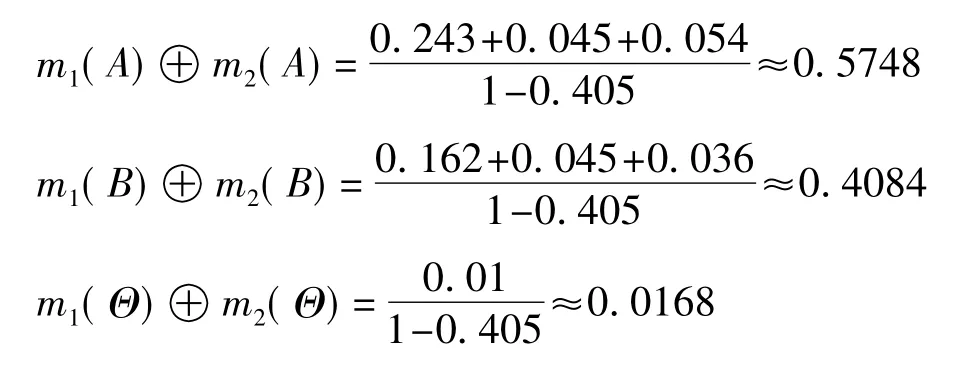
由表1可得这两组证据的冲突概率K为:

可见冲突程度比较小,可以利用经典D-S方法进行融合。
同理,将声音、红外传感器数据融合结果与压力传感器进行组合,如表2所示。
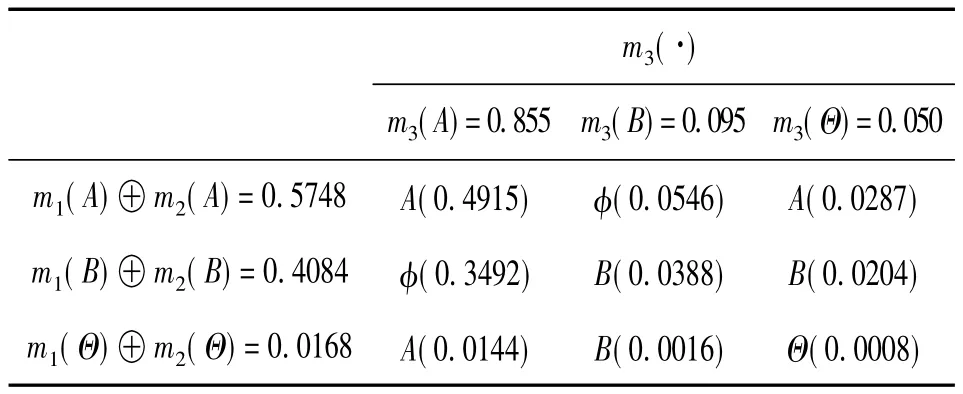
表2 m1(·)和 m2(·)组合结果与 m3(·)组合情况
由表2可得这两组证据的冲突概率K为:

可见冲突程度比较小,仍然可以利用经典D-S方法进行融合。
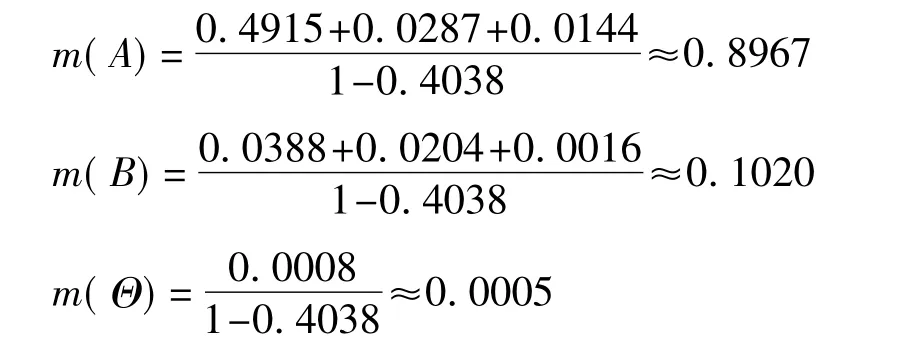
根据决策规则得到最后融合结果。将上述融合结果总结于表3。
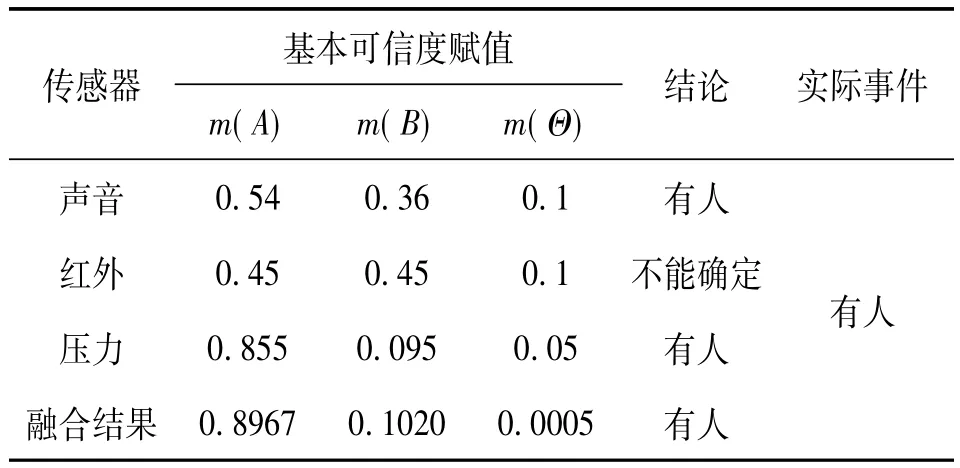
表3 最终融合结果
从最后的融合效果看,融合判别后的结果与实际事件一致,且对比单一传感器的检测效果,通过对多传感器信息进行融合,大大增加了实际事件的基本可信度分配值,减小了其它类型的基本信度分配,系统的不确定性也大为降低。并且,当其中某一个传感器所得信息不确定时,系统仍然有较好的识别率。这充分说明了基于D-S证据理论的多传感器信息融合的可行性和有效性。并且根据冲突系数K与文中设定的阈值的比较来选用D-S方法,可以起到互补的作用,达到更好的识别效果。
值得一提的是,该实例中参与状态监测的传感器只有三种,证据和焦元个数都不多,因此计算比较简便,很容易实现。一旦实际应用中的传感器种类增多,前文所提到的D-S理论计算量的指数“爆炸”问题就会显现出来,运算速度会受到很大影响。单凭分布合成公式或改进公式,并不能减少太多工作量,因此,进一步简化算法,降低计算复杂度将成为今后研究的重要内容。
4 结束语
本文基于D-S理论对无线感知状态监测中的多传感器信息融合技术进行研究,并根据实际中不同的证据冲突状况,合理选择融合算法。多传感器融合可以多方位全面获取目标不同属性信息,提高监测信息的准确度和可靠性。本文研究的无线感知中的多传感器融合技术在实际中还需多方面深入研究,如隶属函数的确定,传感器的不确定值的选择及具体决策规则的确定等,没有形成统一的理论,需要依靠经验进行设置,通过数据积累和实践效果来不断校正,进行更准确的设置。
基于无线感知的监测系统具有经济实用,易安装维护的优点,且系统可以根据用户不同的需求进行配置,增减模块或改变传感器的类型,可适用于不同环境下的状态监测。在车辆运行状态监测,机场跑道侵入检测,区域安全及智能家居系统等方面,具有非常广阔的应用前景。
[1]孙凌逸,黄先祥,蔡伟,等.基于神经网络的无线传感器网络数据融合算法[J].传感技术学报,2011,24(1):122-127.
[2]Hall D L.An Introduction to Multisensor Data Fusion[J].Proceeding of the IEEE,1997,85(1):6-25.
[3]何友,王国宏,彭应宁,等.多传感器信息融合及应用[M].北京:电子工业出版社,2007:1-10,301-308.
[4]Morelli M.Application of Dempster-Shafer Theory of Evidence to the Correlation Problem[C]//Proceeding of the Fifth International Conference on Information Fusion,2002,2(2):759-762.
[5]孙慧影,张彦军,崔平远.用D-S证据理论方法实现多传感器数据融合[J].青岛科技大学学报,2003,24(5):463-465.
[6]李弼程,王波,魏俊.一种有效的证据理论合成公式[J].数据采集与处理,2002,17(1):34-36.
[7]Yager R R.On the D-S Framework and New Combination Rules[J].Information Sciences,1987,41(2):93-138.
[8]褚洪涛,阎波.基于ZigBee无线传感器网络的监控系统设计与实现[J].电子设计应用,2009(8):52-54.
[9]王俊林,张剑云.基于统计证据的Mass函数和D-S证据理论的多传感器目标识别[J].传感技术学报,2006,19(3):862-864.
[10]刘同明.基于证据理论模糊推理的多传感器信息融合海上目标识别[J].模式识别与人工智能.1999,12(1):25-31.
[11]肖利平,杨嘉伟.一种基于模糊理论与D-S证据理论的红外小目标与诱饵识别算法[J].红外技术,2005,27(3):240-244.
[12]王云飞,李辉,李云彬.利用模糊推理的证据理论信息融合算法[J].计算机工程与应用,2010,46(36):144-146.
[13]汪永东,陈颖.模糊证据理论及其在信息融合中的应用[J].工矿自动化,2006,(5):32-34.
[14]韩峰,杨万海,袁晓光,等.基于模糊集合的证据理论信息融合方法[J].控制与决策,2010,25(3):449-452.
[15]孔金生,李文艺.基于模糊集合的证据理论信息融合方法[J].计算机工程与应用,2008,44(20):152-154.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
铁道通信信号(2020年9期)2020-02-06
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
数学大王·趣味逻辑(2019年5期)2019-06-13
小学科学(学生版)(2019年5期)2019-05-21
时代英语·高一(2019年1期)2019-03-13
红土地(2016年3期)2017-01-15
幼儿智力世界(2016年6期)2016-05-14
小雪花·初中高分作文(2015年10期)2015-10-24
